Chance-Constrained Information-Theoretic Stochastic Model Predictive Control with Safety Shielding

0

Sign in to get full access
Overview
- Chance-Constrained Information-Theoretic Stochastic Model Predictive Control with Safety Shielding
- Addresses safety and uncertainty in model predictive control for robotic systems
- Proposes a framework that combines chance-constrained optimization, information-theoretic cost functions, and safety shielding
Plain English Explanation
The paper presents a control framework for robotic systems that aims to address safety and uncertainty. The key ideas are:
-
Chance-Constrained Optimization: The controller takes into account the probability of constraint violations (e.g., collisions) when generating control actions, allowing it to operate safely even in the face of uncertainty.
-
Information-Theoretic Cost Functions: The controller optimizes a cost function that balances the objective (e.g., reaching a goal) with the information gain from the robot's actions. This helps the robot explore its environment efficiently.
-
Safety Shielding: The framework includes a "safety shield" that monitors the robot's state and actions, and intervenes if necessary to prevent unsafe behavior, even if the main controller recommends an unsafe action.
By combining these three elements, the researchers develop a control system that can safely navigate uncertain environments, while also efficiently exploring and achieving its objectives.
Technical Explanation
The paper proposes a Chance-Constrained Information-Theoretic Stochastic Model Predictive Control (CC-IT-SMPC) framework for robotic systems. The key components are:
-
Chance-Constrained Optimization: The controller solves a chance-constrained optimization problem, where the goal is to find control actions that minimize a cost function while ensuring that the probability of constraint violations (e.g., collisions) is below a specified threshold.
-
Information-Theoretic Cost Functions: The cost function used in the optimization combines the objective (e.g., reaching a goal) with an information-theoretic term that encourages the robot to take actions that maximize the information gain about its environment.
-
Safety Shielding: The framework includes a safety shield that monitors the robot's state and actions in real-time. If the safety shield detects that the robot is about to take an unsafe action, it can intervene and apply a corrective action to prevent the violation.
The researchers evaluate their framework on several simulated robotic tasks, including navigation in uncertain environments and object manipulation. The results show that the proposed approach can achieve safe and efficient behavior, outperforming baseline methods.
Critical Analysis
The paper provides a comprehensive framework for addressing safety and uncertainty in model predictive control for robotic systems. The combination of chance-constrained optimization, information-theoretic cost functions, and safety shielding is a promising approach that could have significant implications for the development of more reliable and capable robotic systems.
One potential limitation of the approach is the computational complexity, as solving chance-constrained optimization problems can be challenging, especially in high-dimensional or real-time scenarios. The authors acknowledge this issue and suggest that further research is needed to improve the scalability and efficiency of the framework.
Additionally, the paper focuses on simulated environments, and more research is needed to validate the approach in real-world robotic applications, where additional challenges, such as sensor noise and model mismatch, may arise.
Conclusion
The Chance-Constrained Information-Theoretic Stochastic Model Predictive Control with Safety Shielding framework proposed in this paper represents a significant advancement in the field of model predictive control for robotic systems. By addressing safety and uncertainty in a principled manner, the approach has the potential to enable the development of more reliable and capable robotic systems that can safely operate in complex, dynamic environments. While further research is needed to address the computational challenges and real-world deployment, this work represents an important step towards realizing the full potential of model predictive control in robotics.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Chance-Constrained Information-Theoretic Stochastic Model Predictive Control with Safety Shielding
Ji Yin, Panagiotis Tsiotras, Karl Berntorp
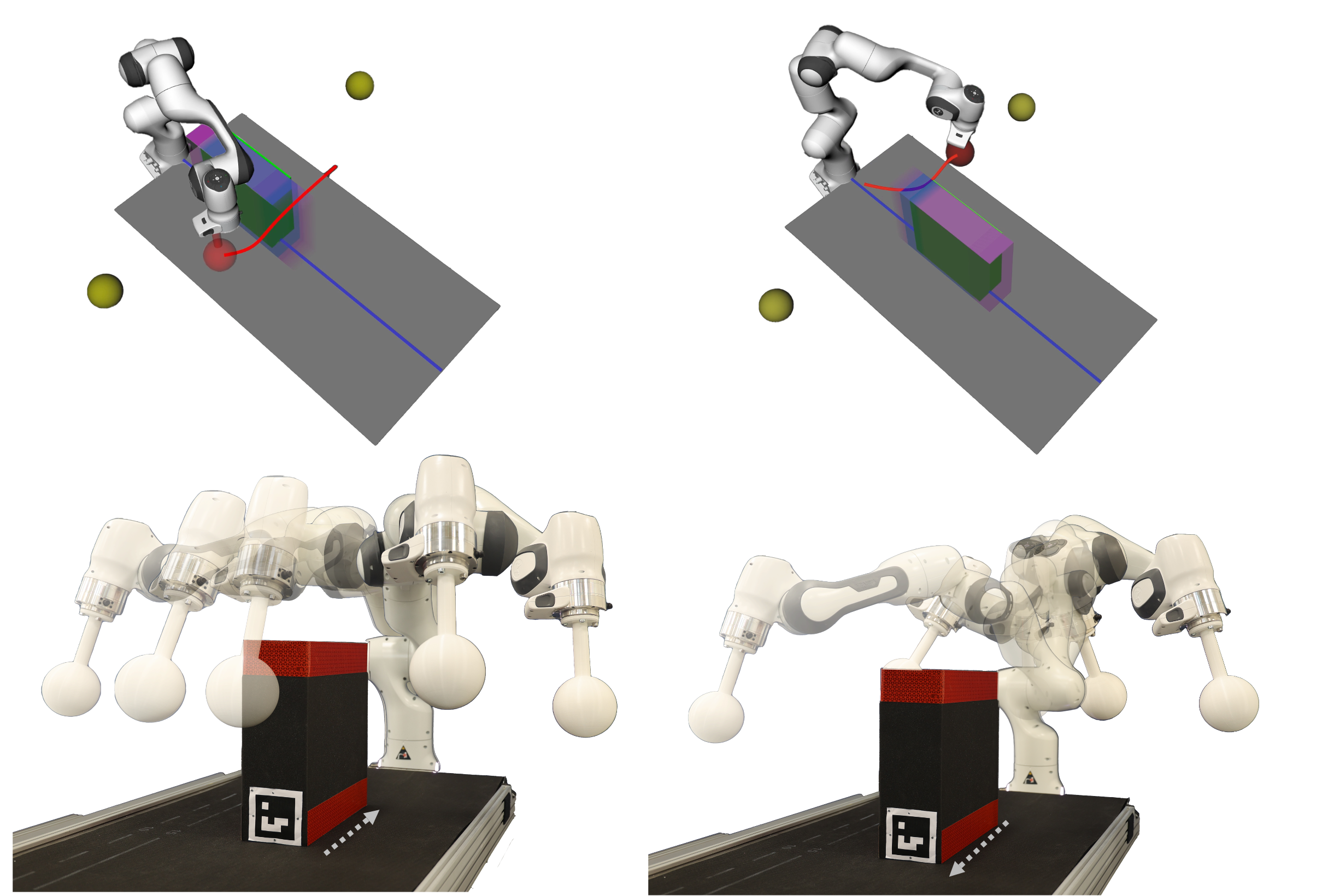
This paper introduces a novel nonlinear stochastic model predictive control path integral (MPPI) method, which considers chance constraints on system states. The proposed belief-space stochastic MPPI (BSS-MPPI) applies Monte-Carlo sampling to evaluate state distributions resulting from underlying systematic disturbances, and utilizes a Control Barrier Function (CBF) inspired heuristic in belief space to fulfill the specified chance constraints. Compared to several previous stochastic predictive control methods, our approach applies to general nonlinear dynamics without requiring the computationally expensive system linearization step. Moreover, the BSS-MPPI controller can solve optimization problems without limiting the form of the objective function and chance constraints. By multi-threading the sampling process using a GPU, we can achieve fast real-time planning for time- and safety-critical tasks such as autonomous racing. Our results on a realistic race-car simulation study show significant reductions in constraint violation compared to some of the prior MPPI approaches, while being comparable in computation times.
Read more8/16/2024
0
Model Predictive Path Integral Methods with Reach-Avoid Tasks and Control Barrier Functions
Hardik Parwana, Mitchell Black, Georgios Fainekos, Bardh Hoxha, Hideki Okamoto, Danil Prokhorov
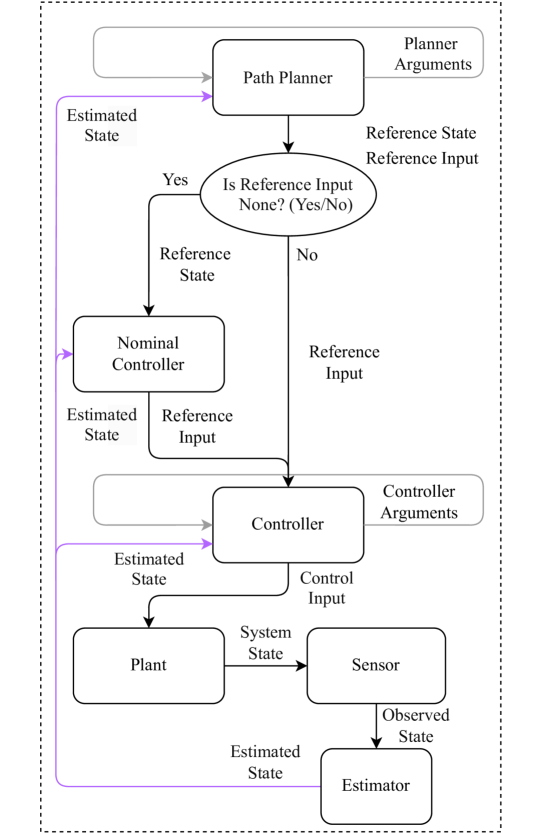
The rapid advancement of robotics necessitates robust tools for developing and testing safe control architectures in dynamic and uncertain environments. Ensuring safety and reliability in robotics, especially in safety-critical applications, is crucial, driving substantial industrial and academic efforts. In this context, we extend CBFkit, a Python/ROS2 toolbox, which now incorporates a planner using reach-avoid specifications as a cost function. This integration with the Model Predictive Path Integral (MPPI) controllers enables the toolbox to satisfy complex tasks while ensuring formal safety guarantees under various sources of uncertainty using Control Barrier Functions (CBFs). CBFkit is optimized for speed using JAX for automatic differentiation and jaxopt for quadratic program solving. The toolbox supports various robotic applications, including autonomous navigation, human-robot interaction, and multi-robot coordination. The toolbox also offers a comprehensive library of planner, controller, sensor, and estimator implementations. Through a series of examples, we demonstrate the enhanced capabilities of CBFkit in different robotic scenarios.
Read more7/19/2024
0
Biased-MPPI: Informing Sampling-Based Model Predictive Control by Fusing Ancillary Controllers
Elia Trevisan, Javier Alonso-Mora
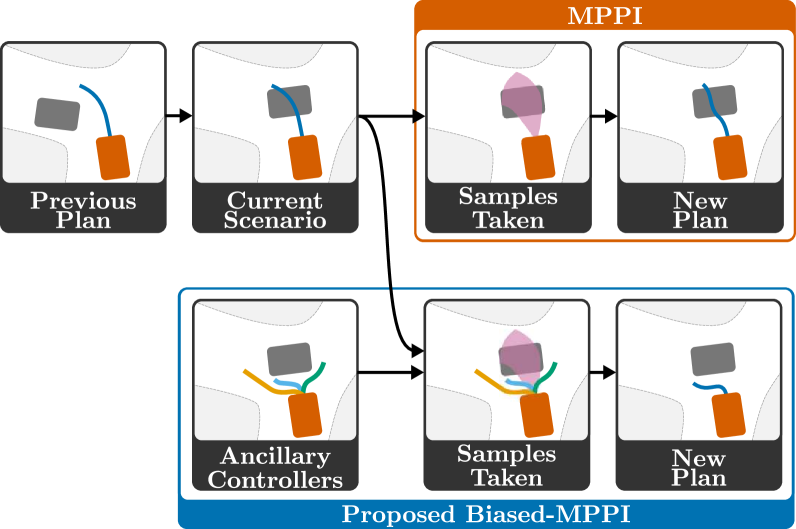
Motion planning for autonomous robots in dynamic environments poses numerous challenges due to uncertainties in the robot's dynamics and interaction with other agents. Sampling-based MPC approaches, such as Model Predictive Path Integral (MPPI) control, have shown promise in addressing these complex motion planning problems. However, the performance of MPPI relies heavily on the choice of sampling distribution. Existing literature often uses the previously computed input sequence as the mean of a Gaussian distribution for sampling, leading to potential failures and local minima. In this paper, we propose a novel derivation of MPPI that allows for arbitrary sampling distributions to enhance efficiency, robustness, and convergence while alleviating the problem of local minima. We present an efficient importance sampling scheme that combines classical and learning-based ancillary controllers simultaneously, resulting in more informative sampling and control fusion. Several simulated and real-world demonstrate the validity of our approach.
Read more5/7/2024
0
CC-VPSTO: Chance-Constrained Via-Point-based Stochastic Trajectory Optimisation for Safe and Efficient Online Robot Motion Planning
Lara Brudermuller, Guillaume Berger, Julius Jankowski, Raunak Bhattacharyya, Raphael Jungers, Nick Hawes
Safety in the face of uncertainty is a key challenge in robotics. We introduce a real-time capable framework to generate safe and task-efficient robot motions for stochastic control problems. We frame this as a chance-constrained optimisation problem constraining the probability of the controlled system to violate a safety constraint to be below a set threshold. To estimate this probability we propose a Monte--Carlo approximation. We suggest several ways to construct the problem given a fixed number of uncertainty samples, such that it is a reliable over-approximation of the original problem, i.e. any solution to the sample-based problem adheres to the original chance-constraint with high confidence. To solve the resulting problem, we integrate it into our motion planner VP-STO and name the enhanced framework Chance-Constrained (CC)-VPSTO. The strengths of our approach lie in i) its generality, without assumptions on the underlying uncertainty distribution, system dynamics, cost function, or the form of inequality constraints; and ii) its applicability to MPC-settings. We demonstrate the validity and efficiency of our approach on both simulation and real-world robot experiments.
Read more4/10/2024