Low Frequency Sampling in Model Predictive Path Integral Control

0

Sign in to get full access
Overview
- This paper proposes a technique called "Low Frequency Sampling in Model Predictive Path Integral Control" to improve the efficiency of model predictive control for robotic systems.
- The key idea is to use a lower sampling rate for the control system while maintaining high-quality performance.
- The authors demonstrate through experiments that this approach can significantly reduce computational requirements without compromising control quality.
Plain English Explanation
Controlling the motion of robots and other complex systems is a challenging task. One common approach is called "model predictive control," which involves continuously predicting the future behavior of the system and adjusting the controls to achieve the desired behavior.
However, model predictive control can be computationally intensive, as it requires constantly evaluating a mathematical model of the system. This paper explores a way to make the control system more efficient by only updating the controls at a lower frequency, rather than continuously.
The core insight is that for many robotic systems, the high-frequency details of the motion are not as important as the overall trajectory. By updating the controls less often, the computational burden is reduced without sacrificing the quality of the control.
The authors demonstrate this approach on simulated robotic systems, showing that they can achieve similar performance to traditional high-frequency model predictive control, but with much lower computational requirements. This could allow more complex robotic systems to be controlled in real-time on less powerful hardware.
In essence, the paper shows that you don't always need to do things at the maximum possible speed to get good results. By judiciously sampling the system at a lower rate, you can often achieve the same outcome with far less effort.
Technical Explanation
The paper presents a novel approach to model predictive control called "Low Frequency Sampling in Model Predictive Path Integral Control" (LFS-MPPI). The key idea is to decouple the control update rate from the system dynamics simulation rate, allowing the control updates to occur at a lower frequency than the system simulation.
Traditionally, model predictive control (MPC) techniques update the controls at the same rate as the system simulation, which can be computationally expensive. LFS-MPPI instead updates the controls at a lower rate, leveraging the fact that high-frequency control adjustments may not be necessary for many robotic systems.
The authors derive the LFS-MPPI algorithm, which uses a path integral formulation of the MPC problem. This allows the control updates to be computed efficiently even at a lower sampling rate. The paper includes a detailed analysis of the stability and performance properties of LFS-MPPI.
The authors evaluate LFS-MPPI through extensive simulations of robotic systems, including a quadrotor and a humanoid robot. They demonstrate that LFS-MPPI can achieve similar control performance to traditional high-frequency MPC, but with significantly lower computational requirements. For example, the humanoid robot experiments show a 5x reduction in computation time.
Critical Analysis
The paper provides a compelling approach to improving the efficiency of model predictive control for robotic systems. The key insight of decoupling the control update rate from the system simulation rate is clever and well-motivated. The authors provide a rigorous mathematical formulation and analysis of the LFS-MPPI algorithm, adding confidence in its theoretical properties.
That said, the paper does not address some potential limitations of the approach. For example, the experiments are conducted in simulation, and it's unclear how well the method would translate to real-world robotic systems with more complex dynamics and disturbances. Additionally, the paper does not discuss the impact of the lower control update rate on the robustness of the system to perturbations or model uncertainty.
Further research could explore the performance of LFS-MPPI on physical robotic platforms, as well as its sensitivity to modeling errors and external disturbances. It would also be valuable to understand the range of robotic systems and applications for which the method is most suitable, and any guidelines for selecting the appropriate control update rate.
Conclusion
This paper presents an innovative approach to improving the efficiency of model predictive control for robotic systems. By decoupling the control update rate from the system simulation rate, the authors demonstrate that significant computational savings can be achieved without compromising control performance.
The LFS-MPPI algorithm provides a principled way to realize this idea, with a solid theoretical foundation and promising experimental results. While further research is needed to fully understand the capabilities and limitations of the method, this work represents an important step towards making advanced control techniques more practical for a wider range of robotic applications.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Low Frequency Sampling in Model Predictive Path Integral Control
Bogdan Vlahov, Jason Gibson, David D. Fan, Patrick Spieler, Ali-akbar Agha-mohammadi, Evangelos A. Theodorou
Sampling-based model-predictive controllers have become a powerful optimization tool for planning and control problems in various challenging environments. In this paper, we show how the default choice of uncorrelated Gaussian distributions can be improved upon with the use of a colored noise distribution. Our choice of distribution allows for the emphasis on low frequency control signals, which can result in smoother and more exploratory samples. We use this frequency-based sampling distribution with Model Predictive Path Integral (MPPI) in both hardware and simulation experiments to show better or equal performance on systems with various speeds of input response.
Read more4/19/2024
0
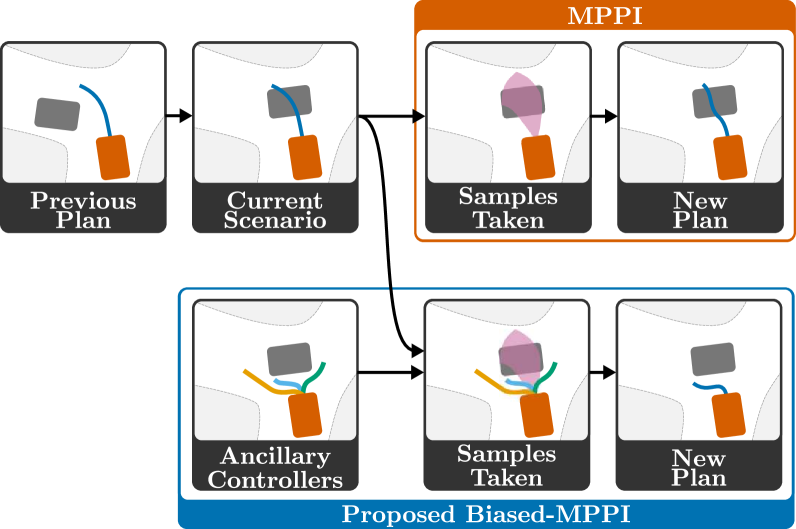
Biased-MPPI: Informing Sampling-Based Model Predictive Control by Fusing Ancillary Controllers
Elia Trevisan, Javier Alonso-Mora
Motion planning for autonomous robots in dynamic environments poses numerous challenges due to uncertainties in the robot's dynamics and interaction with other agents. Sampling-based MPC approaches, such as Model Predictive Path Integral (MPPI) control, have shown promise in addressing these complex motion planning problems. However, the performance of MPPI relies heavily on the choice of sampling distribution. Existing literature often uses the previously computed input sequence as the mean of a Gaussian distribution for sampling, leading to potential failures and local minima. In this paper, we propose a novel derivation of MPPI that allows for arbitrary sampling distributions to enhance efficiency, robustness, and convergence while alleviating the problem of local minima. We present an efficient importance sampling scheme that combines classical and learning-based ancillary controllers simultaneously, resulting in more informative sampling and control fusion. Several simulated and real-world demonstrate the validity of our approach.
Read more5/7/2024

0
Model Predictive Path Integral Control for Agile Unmanned Aerial Vehicles
Michal Minarik, Robert Penicka, Vojtech Vonasek, Martin Saska
This paper introduces a control architecture for real-time and onboard control of Unmanned Aerial Vehicles (UAVs) in environments with obstacles using the Model Predictive Path Integral (MPPI) methodology. MPPI allows the use of the full nonlinear model of UAV dynamics and a more general cost function at the cost of a high computational demand. To run the controller in real-time, the sampling-based optimization is performed in parallel on a graphics processing unit onboard the UAV. We propose an approach to the simulation of the nonlinear system which respects low-level constraints, while also able to dynamically handle obstacle avoidance, and prove that our methods are able to run in real-time without the need for external computers. The MPPI controller is compared to MPC and SE(3) controllers on the reference tracking task, showing a comparable performance. We demonstrate the viability of the proposed method in multiple simulation and real-world experiments, tracking a reference at up to 44 km/h and acceleration close to 20 m/s^2, while still being able to avoid obstacles. To the best of our knowledge, this is the first method to demonstrate an MPPI-based approach in real flight.
Read more7/16/2024

0
Chance-Constrained Information-Theoretic Stochastic Model Predictive Control with Safety Shielding
Ji Yin, Panagiotis Tsiotras, Karl Berntorp
This paper introduces a novel nonlinear stochastic model predictive control path integral (MPPI) method, which considers chance constraints on system states. The proposed belief-space stochastic MPPI (BSS-MPPI) applies Monte-Carlo sampling to evaluate state distributions resulting from underlying systematic disturbances, and utilizes a Control Barrier Function (CBF) inspired heuristic in belief space to fulfill the specified chance constraints. Compared to several previous stochastic predictive control methods, our approach applies to general nonlinear dynamics without requiring the computationally expensive system linearization step. Moreover, the BSS-MPPI controller can solve optimization problems without limiting the form of the objective function and chance constraints. By multi-threading the sampling process using a GPU, we can achieve fast real-time planning for time- and safety-critical tasks such as autonomous racing. Our results on a realistic race-car simulation study show significant reductions in constraint violation compared to some of the prior MPPI approaches, while being comparable in computation times.
Read more8/16/2024