Traversability-aware Adaptive Optimization for Path Planning and Control in Mountainous Terrain
2404.03274
0
0

Abstract
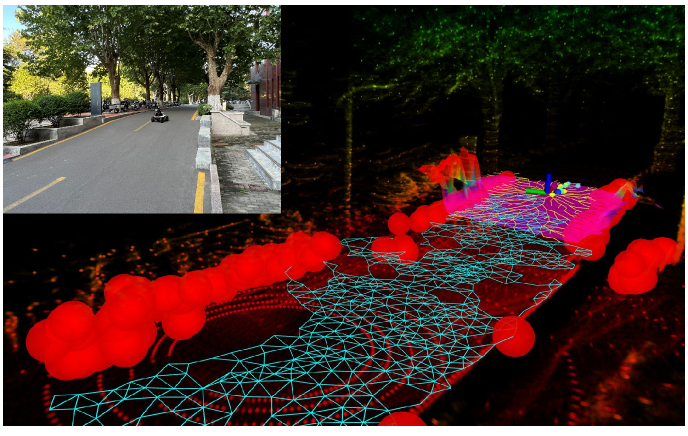
Autonomous navigation in extreme mountainous terrains poses challenges due to the presence of mobility-stressing elements and undulating surfaces, making it particularly difficult compared to conventional off-road driving scenarios. In such environments, estimating traversability solely based on exteroceptive sensors often leads to the inability to reach the goal due to a high prevalence of non-traversable areas. In this paper, we consider traversability as a relative value that integrates the robot's internal state, such as speed and torque to exhibit resilient behavior to reach its goal successfully. We separate traversability into apparent traversability and relative traversability, then incorporate these distinctions in the optimization process of sampling-based planning and motion predictive control. Our method enables the robots to execute the desired behaviors more accurately while avoiding hazardous regions and getting stuck. Experiments conducted on simulation with 27 diverse types of mountainous terrain and real-world demonstrate the robustness of the proposed framework, with increasingly better performance observed in more complex environments.
Create account to get full access
Overview
• This paper presents a novel approach for path planning and control in rugged, mountainous terrain using adaptive optimization techniques.
• The key ideas include incorporating traversability information into the optimization process, adapting the planning and control strategies based on real-time sensor data, and enabling the system to handle challenging terrain features.
• The proposed method aims to improve the robustness and effectiveness of mobile robots navigating through complex outdoor environments.
Plain English Explanation
The research focuses on helping robots navigate through rough, mountainous areas more effectively. Navigating such challenging terrain can be very difficult for robots, as they need to account for factors like steep slopes, rocky surfaces, and unpredictable conditions.
The researchers developed a new approach that allows the robots to continuously adjust their path planning and control strategies based on real-time sensor data about the terrain. Instead of following a pre-determined route, the robots can dynamically update their plans to adapt to the changing environment.
A key aspect is that the system incorporates information about how "traversable" or accessible different parts of the terrain are. This helps the robots avoid areas that would be too difficult or dangerous to cross, and instead find safer, more efficient paths. The adaptive optimization techniques allow the robots to make these assessments on the fly and quickly modify their behavior accordingly.
By integrating traversability data and enabling adaptive planning and control, the researchers aimed to make the robots more robust and capable of handling the unpredictable challenges of mountainous environments. This could have important applications for field robots used in tasks like search and rescue, environmental monitoring, or resource exploration in remote, rugged locations.
Technical Explanation
The paper proposes a "traversability-aware adaptive optimization" approach for path planning and control of mobile robots in mountainous terrain. The key components include:
-
Traversability Modeling: The system incorporates a traversability map that estimates the difficulty of traversing different areas of the terrain based on factors like slope, roughness, and vegetation. This information is used to guide the path planning.
-
Adaptive Optimization: The planning and control algorithms dynamically adjust their objectives and strategies in real-time based on sensor data about the current terrain conditions. This allows the robot to adapt its behavior to handle unexpected obstacles or challenging features.
-
Integrated Planning and Control: The path planning and low-level control are closely coupled, with the control system providing feedback to continuously refine the planned path. This tight integration enables more effective navigation through the complex environment.
The researchers evaluated their approach through simulation experiments and real-world field trials with a wheeled mobile robot platform. The results demonstrate improved traversal performance, path efficiency, and robustness compared to traditional planning methods.
Critical Analysis
The paper provides a detailed and well-designed technical solution for the challenging problem of robot navigation in rugged, mountainous environments. The key strengths are the incorporation of traversability modeling, the adaptive optimization techniques, and the tight integration of planning and control.
However, the authors acknowledge some limitations, such as the need for further improvements to handle more extreme terrain features and the reliance on accurate sensor data, which can be difficult to obtain in some outdoor settings. Additionally, the computational demands of the adaptive optimization approach may limit its applicability on resource-constrained robot platforms.
Further research could explore ways to reduce the computational complexity, incorporate more advanced terrain perception capabilities, and validate the approach across a broader range of field conditions and robot platforms. Investigating how the techniques could scale to complex, multi-robot systems would also be an interesting direction.
Overall, this work represents a significant advance in enabling mobile robots to navigate challenging outdoor environments more robustly and effectively. The adaptive, traversability-aware optimization approach shows promise for improving the autonomy and performance of field robots in a variety of real-world applications.
Conclusion
This research presents a novel method for path planning and control of mobile robots in mountainous terrain, which addresses key challenges such as unpredictable terrain conditions and the need for adaptive, robust navigation strategies. By integrating traversability modeling, adaptive optimization techniques, and tight coupling between planning and control, the proposed system enables robots to navigate complex outdoor environments more effectively.
The simulation and field trial results demonstrate the potential of this approach to improve traversal performance, path efficiency, and overall robustness. While some limitations and areas for further research remain, this work represents an important step forward in enhancing the capabilities of field robots operating in rugged, unstructured terrain. The insights and techniques could have far-reaching applications in areas like search and rescue, environmental monitoring, and resource exploration in remote, difficult-to-access locations.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
📈
Model Predictive Control for Aggressive Driving Over Uneven Terrain
Tyler Han, Alex Liu, Anqi Li, Alex Spitzer, Guanya Shi, Byron Boots
0
0
Terrain traversability in unstructured off-road autonomy has traditionally relied on semantic classification, resource-intensive dynamics models, or purely geometry-based methods to predict vehicle-terrain interactions. While inconsequential at low speeds, uneven terrain subjects our full-scale system to safety-critical challenges at operating speeds of 7--10 m/s. This study focuses particularly on uneven terrain such as hills, banks, and ditches. These common high-risk geometries are capable of disabling the vehicle and causing severe passenger injuries if poorly traversed. We introduce a physics-based framework for identifying traversability constraints on terrain dynamics. Using this framework, we derive two fundamental constraints, each with a focus on mitigating rollover and ditch-crossing failures while being fully parallelizable in the sample-based Model Predictive Control (MPC) framework. In addition, we present the design of our planning and control system, which implements our parallelized constraints in MPC and utilizes a low-level controller to meet the demands of our aggressive driving without prior information about the environment and its dynamics. Through real-world experimentation and traversal of hills and ditches, we demonstrate that our approach captures fundamental elements of safe and aggressive autonomy over uneven terrain. Our approach improves upon geometry-based methods by completing comprehensive off-road courses up to 22% faster while maintaining safe operation.
6/11/2024

Learning-based Traversability Costmap for Autonomous Off-road Navigation
Qiumin Zhu, Zhen Sun, Songpengcheng Xia, Guoqing Liu, Kehui Ma, Ling Pei, Zheng Gong
0
0
Traversability estimation in off-road terrains is an essential procedure for autonomous navigation. However, creating reliable labels for complex interactions between the robot and the surface is still a challenging problem in learning-based costmap generation. To address this, we propose a method that predicts traversability costmaps by leveraging both visual and geometric information of the environment. To quantify the surface properties like roughness and bumpiness, we introduce a novel way of risk-aware labelling with proprioceptive information for network training. We validate our method in costmap prediction and navigation tasks for complex off-road scenarios. Our results demonstrate that our costmap prediction method excels in terms of average accuracy and MSE. The navigation results indicate that using our learned costmaps leads to safer and smoother driving, outperforming previous methods in terms of the highest success rate, lowest normalized trajectory length, lowest time cost, and highest mean stability across two scenarios.
6/13/2024
🎯
ForestTrav: Accurate, Efficient and Deployable Forest Traversability Estimation for Autonomous Ground Vehicles
Fabio Ruetz, Nicholas Lawrance, Emili Hern'andez, Paulo Borges, Thierry Peynot
0
0
Autonomous navigation in unstructured vegetated environments remains an open challenge. To successfully operate in these settings, ground vehicles must assess the traversability of the environment and determine which vegetation is pliable enough to push through. In this work, we propose a novel method that combines a high-fidelity and feature-rich 3D voxel representation while leveraging the structural context and sparseness of SCNN's to assess Traversability Estimation (TE) in densely vegetated environments. The proposed method is thoroughly evaluated on an accurately-labeled real-world data set that we provide to the community. It is shown to outperform state-of-the-art methods by a significant margin (0.59 vs. 0.39 MCC score at 0.1m voxel resolution) in challenging scenes and to generalize to unseen environments. In addition, the method is economical in the amount of training data and training time required: a model is trained in minutes on a desktop computer. We show that by exploiting the context of the environment, our method can use different feature combinations with only limited performance variations. For example, our approach can be used with lidar-only features, whilst still assessing complex vegetated environments accurately, which was not demonstrated previously in the literature in such environments. In addition, we propose an approach to assess a traversability estimator's sensitivity to information quality and show our method's sensitivity is low.
5/16/2024
History-Aware Planning for Risk-free Autonomous Navigation on Unknown Uneven Terrain
Yinchuan Wang, Nianfei Du, Yongsen Qin, Xiang Zhang, Rui Song, Chaoqun Wang
0
0
It is challenging for the mobile robot to achieve autonomous and mapless navigation in the unknown environment with uneven terrain. In this study, we present a layered and systematic pipeline. At the local level, we maintain a tree structure that is dynamically extended with the navigation. This structure unifies the planning with the terrain identification. Besides, it contributes to explicitly identifying the hazardous areas on uneven terrain. In particular, certain nodes of the tree are consistently kept to form a sparse graph at the global level, which records the history of the exploration. A series of subgoals that can be obtained in the tree and the graph are utilized for leading the navigation. To determine a subgoal, we develop an evaluation method whose input elements can be efficiently obtained on the layered structure. We conduct both simulation and real-world experiments to evaluate the developed method and its key modules. The experimental results demonstrate the effectiveness and efficiency of our method. The robot can travel through the unknown uneven region safely and reach the target rapidly without a preconstructed map.
6/5/2024