BoostTrack++: using tracklet information to detect more objects in multiple object tracking

0
Sign in to get full access
Overview
- This paper proposes a new multiple object tracking (MOT) algorithm called BoostTrack++ that uses tracklet information to detect more objects.
- The key idea is to leverage the detections and tracklets from previous frames to improve object detection in the current frame.
- The authors show that this approach can significantly improve the performance of MOT systems compared to traditional methods.
Plain English Explanation
The paper introduces a new algorithm called BoostTrack++ for tracking multiple objects in video. The main innovation is using information from previous frames, such as the detected objects and their trajectories, to help find more objects in the current frame.
Typical object tracking systems rely on detecting objects in each frame independently. But BoostTrack++ leverages the track initialization and re-identification from previous frames to boost the object detection in the current frame. This helps find objects that might have been missed by the standard detection methods.
The authors show that this approach leads to significant improvements in the overall multi-object tracking performance compared to prior work. The key is that using information from the entire video, rather than just the current frame, allows the system to be more robust and accurate.
Technical Explanation
The core idea behind BoostTrack++ is to use the tracklet information - the detected objects and their trajectories over time - to improve object detection in the current frame. Specifically, the algorithm does the following:
- Runs a base object detector on the current frame to get an initial set of detections.
- Associates these detections with tracklets from previous frames using an IoU-based matching approach.
- For unmatched detections, it leverages the tracklet information to try and find additional objects that may have been missed by the base detector.
- This combined set of detections is then used for the final multi-object tracking.
The key insight is that the tracklet information can provide valuable cues about the location and appearance of objects, allowing the system to find more of them in challenging cases where the base detector may fail. The authors demonstrate significant performance gains on standard MOT benchmarks using this approach.
Critical Analysis
The paper presents a well-designed and empirically validated approach to improving multi-object tracking. The use of tracklet information to boost object detection is a clever and effective idea that addresses a key limitation of traditional MOT systems.
One potential limitation is the reliance on a base object detector, which means the performance is still bounded by the quality of that underlying system. Additionally, the paper does not explore the tradeoffs between the computational overhead of the tracklet-based detection boost and the performance gains.
It would also be interesting to see how BoostTrack++ performs on more diverse or challenging datasets, as the experiments are primarily conducted on standard benchmarks. Exploring the algorithm's robustness to occlusions, camera motion, and other real-world complexities could provide further insights.
Overall, BoostTrack++ represents a promising direction for advancing the state-of-the-art in multi-object tracking, and the core ideas could potentially be extended or combined with other techniques for even greater performance improvements.
Conclusion
The BoostTrack++ algorithm presented in this paper is an innovative approach to multi-object tracking that leverages tracklet information to significantly improve object detection. By using cues from previous frames, the system is able to find more objects in challenging situations where a standard detector may fail.
The authors demonstrate impressive performance gains on standard benchmarks, highlighting the value of this tracklet-boosted detection strategy. While there are some potential limitations to explore, BoostTrack++ represents an exciting development in the field of multi-object tracking with broad applicability in areas like autonomous vehicles, surveillance, and human-computer interaction.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
BoostTrack++: using tracklet information to detect more objects in multiple object tracking
Vukav{s}in Stanojevi'c, Branimir Todorovi'c
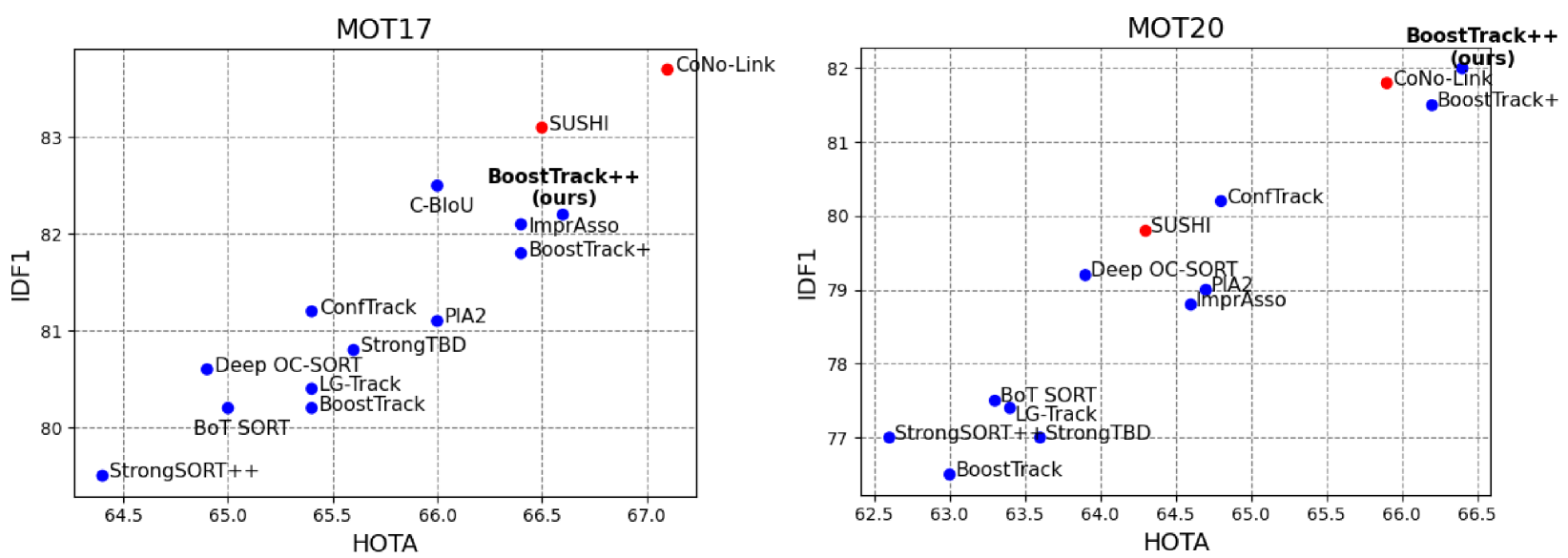
Multiple object tracking (MOT) depends heavily on selection of true positive detected bounding boxes. However, this aspect of the problem is mostly overlooked or mitigated by employing two-stage association and utilizing low confidence detections in the second stage. Recently proposed BoostTrack attempts to avoid the drawbacks of multiple stage association approach and use low-confidence detections by applying detection confidence boosting. In this paper, we identify the limitations of the confidence boost used in BoostTrack and propose a method to improve its performance. To construct a richer similarity measure and enable a better selection of true positive detections, we propose to use a combination of shape, Mahalanobis distance and novel soft BIoU similarity. We propose a soft detection confidence boost technique which calculates new confidence scores based on the similarity measure and the previous confidence scores, and we introduce varying similarity threshold to account for lower similarity measure between detections and tracklets which are not regularly updated. The proposed additions are mutually independent and can be used in any MOT algorithm. Combined with the BoostTrack+ baseline, our method achieves near state of the art results on the MOT17 dataset and new state of the art HOTA and IDF1 scores on the MOT20 dataset. The source code is available at: https://github.com/vukasin-stanojevic/BoostTrack .
Read more8/26/2024
🔎
0
UncertaintyTrack: Exploiting Detection and Localization Uncertainty in Multi-Object Tracking
Chang Won Lee, Steven L. Waslander
Multi-object tracking (MOT) methods have seen a significant boost in performance recently, due to strong interest from the research community and steadily improving object detection methods. The majority of tracking methods follow the tracking-by-detection (TBD) paradigm, blindly trust the incoming detections with no sense of their associated localization uncertainty. This lack of uncertainty awareness poses a problem in safety-critical tasks such as autonomous driving where passengers could be put at risk due to erroneous detections that have propagated to downstream tasks, including MOT. While there are existing works in probabilistic object detection that predict the localization uncertainty around the boxes, no work in 2D MOT for autonomous driving has studied whether these estimates are meaningful enough to be leveraged effectively in object tracking. We introduce UncertaintyTrack, a collection of extensions that can be applied to multiple TBD trackers to account for localization uncertainty estimates from probabilistic object detectors. Experiments on the Berkeley Deep Drive MOT dataset show that the combination of our method and informative uncertainty estimates reduces the number of ID switches by around 19% and improves mMOTA by 2-3%. The source code is available at https://github.com/TRAILab/UncertaintyTrack
Read more5/1/2024
0
Hierarchical IoU Tracking based on Interval
Yunhao Du, Zhicheng Zhao, Fei Su
Multi-Object Tracking (MOT) aims to detect and associate all targets of given classes across frames. Current dominant solutions, e.g. ByteTrack and StrongSORT++, follow the hybrid pipeline, which first accomplish most of the associations in an online manner, and then refine the results using offline tricks such as interpolation and global link. While this paradigm offers flexibility in application, the disjoint design between the two stages results in suboptimal performance. In this paper, we propose the Hierarchical IoU Tracking framework, dubbed HIT, which achieves unified hierarchical tracking by utilizing tracklet intervals as priors. To ensure the conciseness, only IoU is utilized for association, while discarding the heavy appearance models, tricky auxiliary cues, and learning-based association modules. We further identify three inconsistency issues regarding target size, camera movement and hierarchical cues, and design corresponding solutions to guarantee the reliability of associations. Though its simplicity, our method achieves promising performance on four datasets, i.e., MOT17, KITTI, DanceTrack and VisDrone, providing a strong baseline for future tracking method design. Moreover, we experiment on seven trackers and prove that HIT can be seamlessly integrated with other solutions, whether they are motion-based, appearance-based or learning-based. Our codes will be released at https://github.com/dyhBUPT/HIT.
Read more6/21/2024

0
ConsistencyTrack: A Robust Multi-Object Tracker with a Generation Strategy of Consistency Model
Lifan Jiang, Zhihui Wang, Siqi Yin, Guangxiao Ma, Peng Zhang, Boxi Wu
Multi-object tracking (MOT) is a critical technology in computer vision, designed to detect multiple targets in video sequences and assign each target a unique ID per frame. Existed MOT methods excel at accurately tracking multiple objects in real-time across various scenarios. However, these methods still face challenges such as poor noise resistance and frequent ID switches. In this research, we propose a novel ConsistencyTrack, joint detection and tracking(JDT) framework that formulates detection and association as a denoising diffusion process on perturbed bounding boxes. This progressive denoising strategy significantly improves the model's noise resistance. During the training phase, paired object boxes within two adjacent frames are diffused from ground-truth boxes to a random distribution, and then the model learns to detect and track by reversing this process. In inference, the model refines randomly generated boxes into detection and tracking results through minimal denoising steps. ConsistencyTrack also introduces an innovative target association strategy to address target occlusion. Experiments on the MOT17 and DanceTrack datasets demonstrate that ConsistencyTrack outperforms other compared methods, especially better than DiffusionTrack in inference speed and other performance metrics. Our code is available at https://github.com/Tankowa/ConsistencyTrack.
Read more8/29/2024