Can 3D Vision-Language Models Truly Understand Natural Language?

0

Sign in to get full access
Overview
- This paper investigates the ability of 3D vision-language models to truly understand natural language, beyond just matching language to visual inputs.
- The researchers introduce a new benchmark called 3D Language Robustness (3D-LR) to evaluate how well these models can handle language that requires reasoning about the 3D world.
- They find that current state-of-the-art 3D vision-language models struggle on the 3D-LR benchmark, suggesting limitations in their natural language understanding capabilities.
Plain English Explanation
The paper looks at whether 3D vision-language models, which combine computer vision and natural language processing, can truly understand the meaning of language rather than just matching words to visual inputs. To test this, the researchers created a new benchmark called 3D Language Robustness (3D-LR) that evaluates how well these models can handle language that requires reasoning about the 3D world, like spatial relationships and object properties.
When they tested leading 3D vision-language models on this benchmark, the models struggled, suggesting they have limitations in their natural language understanding abilities. Even though these models can match language to 3D visual inputs, they may not have a deep enough grasp of the 3D world to fully comprehend the meaning behind certain types of language.
This work highlights that while 3D vision-language models have made impressive progress, there is still room for improvement in their ability to understand natural language in a more human-like way, especially when it comes to reasoning about the 3D physical world. The 3D-LR benchmark provides a new way to assess and advance the language understanding capabilities of these models.
Technical Explanation
The paper introduces the 3D Language Robustness (3D-LR) benchmark to evaluate how well 3D vision-language models can handle language that requires reasoning about the 3D world. 3D-LR consists of four tasks: Spatial Relational Probing, Attribute Probing, Affordance Probing, and Referential Grounding. These tasks assess the models' ability to understand spatial relationships, object attributes, object affordances, and referring expressions in a 3D context.
The researchers tested several state-of-the-art 3D vision-language models, including ViL-CLIP, X-LXMERT, and 3D-VLP, on the 3D-LR benchmark. They found that while these models perform well on existing 3D vision-language tasks, they struggle on the 3D-LR benchmark, suggesting limitations in their natural language understanding capabilities.
The paper also introduces a new 3D vision-language model called DiffuSyn that aims to address some of these limitations. DiffuSyn leverages diffusion models and contrastive learning to improve its understanding of 3D scenes and language.
Critical Analysis
The 3D-LR benchmark provides a valuable new tool for evaluating the language understanding capabilities of 3D vision-language models. By focusing on tasks that require reasoning about the 3D world, it highlights limitations in the current state-of-the-art models that may not be apparent in more traditional vision-language benchmarks.
However, the paper does not delve deeply into the specific reasons why the tested models struggled on the 3D-LR benchmark. More analysis of the model architectures, training data, and learning approaches would be helpful to understand the underlying challenges.
Additionally, while the introduction of DiffuSyn is promising, the paper provides limited details on its architecture and training, making it difficult to assess its potential advantages over other models. Further research and comparative evaluation would be needed to validate its effectiveness.
Overall, this paper makes an important contribution by drawing attention to the need for 3D vision-language models to develop more robust natural language understanding capabilities, particularly when it comes to reasoning about the physical world. The 3D-LR benchmark represents a valuable step forward in this direction.
Conclusion
This paper investigates the natural language understanding capabilities of 3D vision-language models, introducing a new benchmark called 3D Language Robustness (3D-LR) to assess their ability to reason about the 3D world. The researchers find that current state-of-the-art models struggle on this benchmark, suggesting limitations in their language understanding that go beyond just matching language to visual inputs.
The 3D-LR benchmark and the insights from this work highlight the need for continued research and development to improve the natural language understanding capabilities of 3D vision-language models. As these models become increasingly important for applications like robotics, enhancing their ability to comprehend language in the context of the 3D physical world will be crucial. This paper lays the groundwork for advancing the field in this direction.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Can 3D Vision-Language Models Truly Understand Natural Language?
Weipeng Deng, Jihan Yang, Runyu Ding, Jiahui Liu, Yijiang Li, Xiaojuan Qi, Edith Ngai
Rapid advancements in 3D vision-language (3D-VL) tasks have opened up new avenues for human interaction with embodied agents or robots using natural language. Despite this progress, we find a notable limitation: existing 3D-VL models exhibit sensitivity to the styles of language input, struggling to understand sentences with the same semantic meaning but written in different variants. This observation raises a critical question: Can 3D vision-language models truly understand natural language? To test the language understandability of 3D-VL models, we first propose a language robustness task for systematically assessing 3D-VL models across various tasks, benchmarking their performance when presented with different language style variants. Importantly, these variants are commonly encountered in applications requiring direct interaction with humans, such as embodied robotics, given the diversity and unpredictability of human language. We propose a 3D Language Robustness Dataset, designed based on the characteristics of human language, to facilitate the systematic study of robustness. Our comprehensive evaluation uncovers a significant drop in the performance of all existing models across various 3D-VL tasks. Even the state-of-the-art 3D-LLM fails to understand some variants of the same sentences. Further in-depth analysis suggests that the existing models have a fragile and biased fusion module, which stems from the low diversity of the existing dataset. Finally, we propose a training-free module driven by LLM, which improves language robustness. Datasets and code will be available at github.
Read more7/4/2024

0
3D Vision and Language Pretraining with Large-Scale Synthetic Data
Dejie Yang, Zhu Xu, Wentao Mo, Qingchao Chen, Siyuan Huang, Yang Liu
3D Vision-Language Pre-training (3D-VLP) aims to provide a pre-train model which can bridge 3D scenes with natural language, which is an important technique for embodied intelligence. However, current 3D-VLP datasets are hindered by limited scene-level diversity and insufficient fine-grained annotations (only 1.2K scenes and 280K textual annotations in ScanScribe), primarily due to the labor-intensive of collecting and annotating 3D scenes. To overcome these obstacles, we construct SynVL3D, a comprehensive synthetic scene-text corpus with 10K indoor scenes and 1M descriptions at object, view, and room levels, which has the advantages of diverse scene data, rich textual descriptions, multi-grained 3D-text associations, and low collection cost. Utilizing the rich annotations in SynVL3D, we pre-train a simple and unified Transformer for aligning 3D and language with multi-grained pretraining tasks. Moreover, we propose a synthetic-to-real domain adaptation in downstream task fine-tuning process to address the domain shift. Through extensive experiments, we verify the effectiveness of our model design by achieving state-of-the-art performance on downstream tasks including visual grounding, dense captioning, and question answering.
Read more7/9/2024
0
Evaluating Large Vision-Language Models' Understanding of Real-World Complexities Through Synthetic Benchmarks
Haokun Zhou, Yipeng Hong
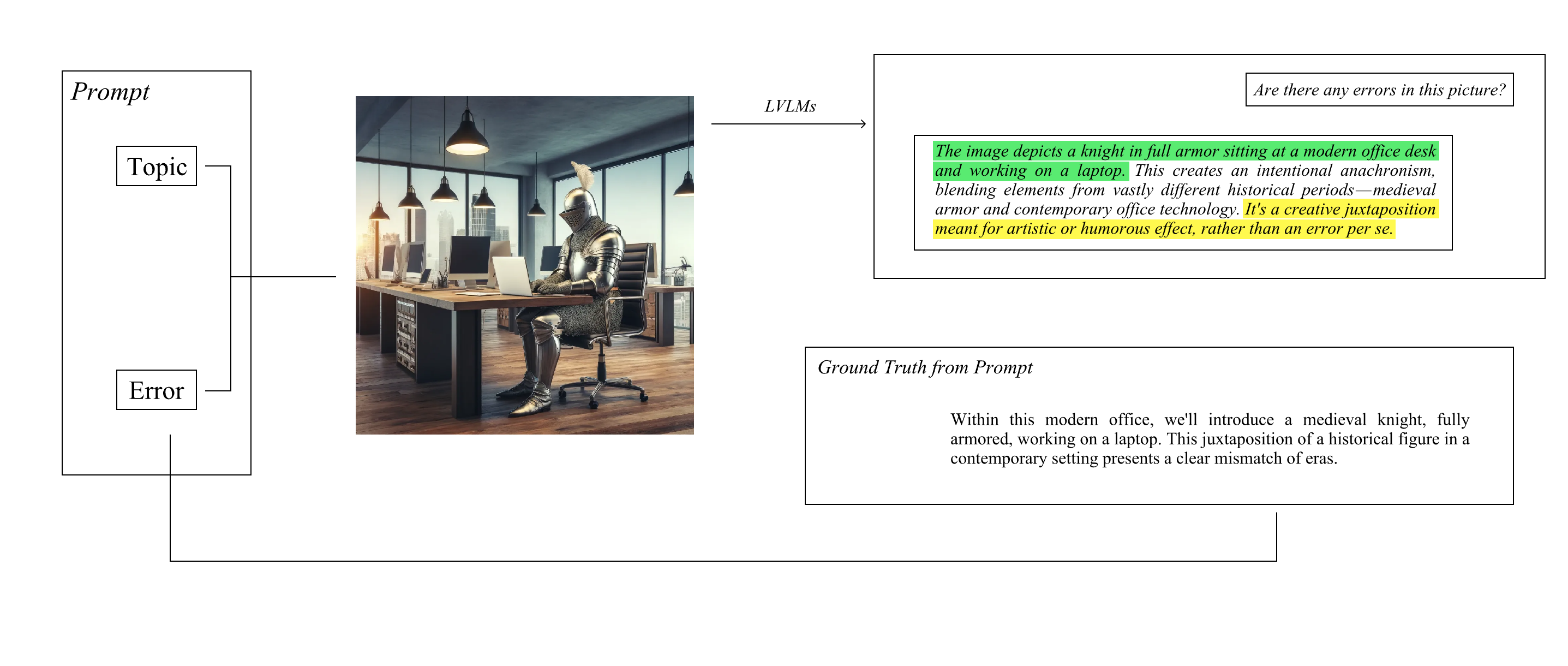
This study assesses the ability of Large Vision-Language Models (LVLMs) to differentiate between AI-generated and human-generated images. It introduces a new automated benchmark construction method for this evaluation. The experiment compared common LVLMs with human participants using a mixed dataset of AI and human-created images. Results showed that LVLMs could distinguish between the image types to some extent but exhibited a rightward bias, and perform significantly worse compared to humans. To build on these findings, we developed an automated benchmark construction process using AI. This process involved topic retrieval, narrative script generation, error embedding, and image generation, creating a diverse set of text-image pairs with intentional errors. We validated our method through constructing two caparable benchmarks. This study highlights the strengths and weaknesses of LVLMs in real-world understanding and advances benchmark construction techniques, providing a scalable and automatic approach for AI model evaluation.
Read more6/14/2024
0
Video-Language Understanding: A Survey from Model Architecture, Model Training, and Data Perspectives
Thong Nguyen, Yi Bin, Junbin Xiao, Leigang Qu, Yicong Li, Jay Zhangjie Wu, Cong-Duy Nguyen, See-Kiong Ng, Luu Anh Tuan
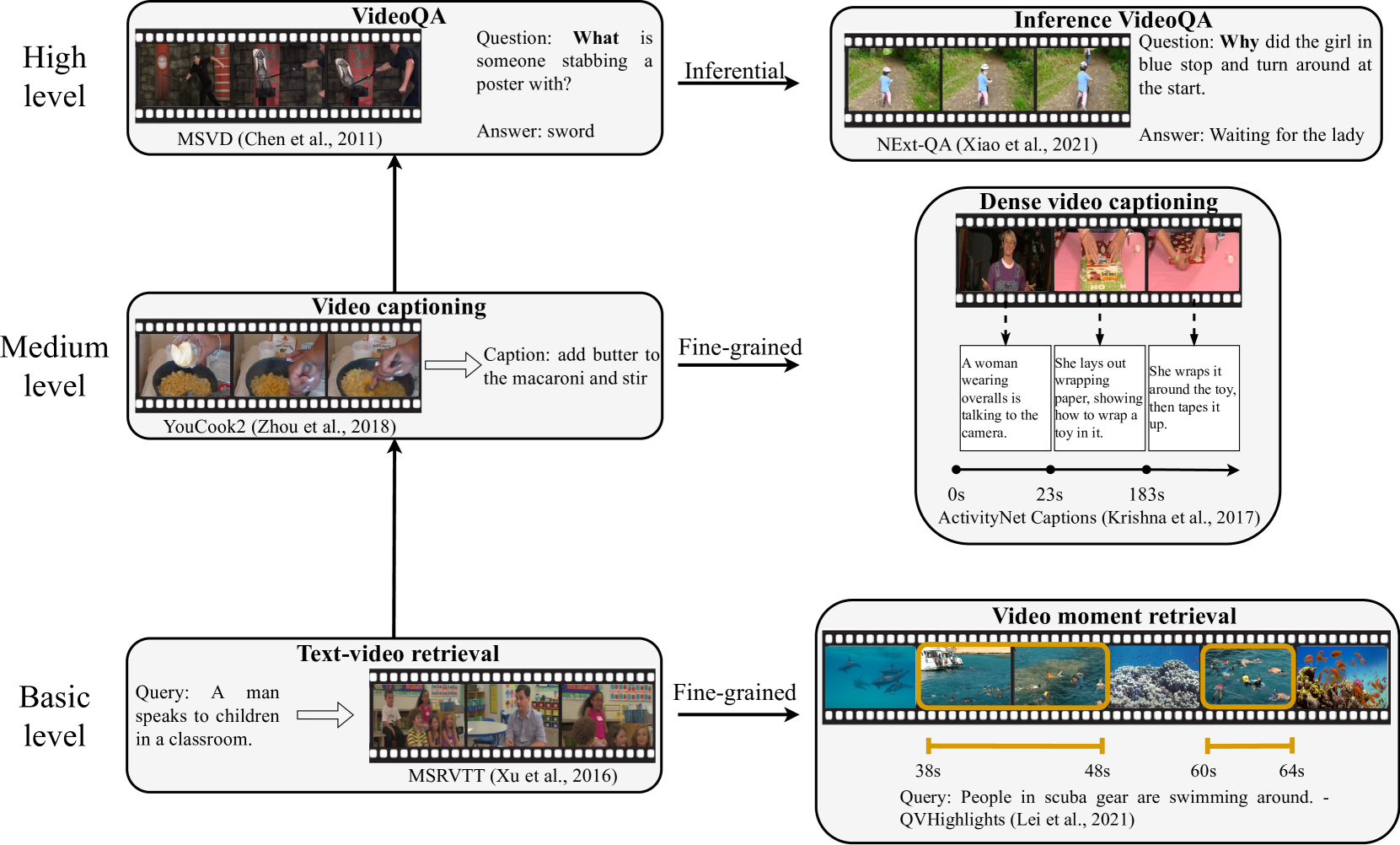
Humans use multiple senses to comprehend the environment. Vision and language are two of the most vital senses since they allow us to easily communicate our thoughts and perceive the world around us. There has been a lot of interest in creating video-language understanding systems with human-like senses since a video-language pair can mimic both our linguistic medium and visual environment with temporal dynamics. In this survey, we review the key tasks of these systems and highlight the associated challenges. Based on the challenges, we summarize their methods from model architecture, model training, and data perspectives. We also conduct performance comparison among the methods, and discuss promising directions for future research.
Read more7/2/2024