Can LLMs Understand Social Norms in Autonomous Driving Games?

0

Sign in to get full access
Overview
- This paper explores whether large language models (LLMs) can understand social norms in autonomous driving games.
- The researchers designed an experiment to test LLMs' ability to navigate social interactions in a simulated driving scenario.
- They found that LLMs can learn and apply social norms to some extent, but there are still significant limitations in their understanding.
Plain English Explanation
The paper investigates whether large language models (LLMs) - advanced AI systems that can understand and generate human-like text - can comprehend the unwritten rules or "social norms" that people follow when driving.
The researchers created a simulation where autonomous driving agents (represented by LLMs) had to navigate a virtual driving environment and interact with other vehicles. They wanted to see if the LLMs could learn and apply social norms, like yielding to other cars or following traffic signals, in order to drive safely and cooperatively.
Overall, the results showed that the LLMs were able to pick up on some social norms to a degree. However, there were still significant limitations in their understanding and ability to apply these norms consistently. The paper highlights the challenges in imbuing AI systems with a nuanced grasp of complex social behaviors.
Technical Explanation
The paper describes an experiment where the researchers tested the ability of large language models (LLMs) to navigate social interactions in an autonomous driving simulation.
They created a multi-agent driving environment where each agent was represented by an LLM. The agents had to navigate the virtual roads, obeying traffic laws and signals while also yielding to and cooperating with other vehicles.
The researchers found that the LLMs were able to learn and apply certain social norms to some extent. For example, they would slow down or change lanes to avoid collisions. However, their understanding was still quite limited compared to human drivers. The LLMs struggled with more complex social situations, like determining the right-of-way in ambiguous scenarios.
The paper highlights the challenges in imbuing AI systems with a nuanced grasp of social behaviors and norms. While LLMs have made impressive strides in understanding language and generating human-like text, translating that to real-world social interactions remains an ongoing challenge for the field of AI-powered autonomous driving.
Critical Analysis
The paper provides a thoughtful exploration of the limitations in LLMs' understanding of social norms, which is an important consideration for the development of autonomous driving systems.
While the researchers demonstrate that LLMs can learn and apply some basic social norms, the paper rightly points out that their grasp of more complex, context-dependent social behaviors is still quite limited. This suggests that purely language-based AI systems may not be sufficient for fully autonomous driving, which requires nuanced social intelligence.
One potential area for further research mentioned in the paper is the integration of other AI techniques, such as reinforcement learning or multimodal perception, to help LLMs better understand and navigate social situations. Combining language understanding with other cognitive capabilities may be key to developing autonomous driving agents that can truly emulate human-level social intelligence.
Conclusion
This paper highlights an important limitation in the capabilities of current large language models (LLMs) - their inability to fully grasp the social norms and context-dependent behaviors required for safe and cooperative autonomous driving.
While the experiment showed that LLMs can learn and apply some basic social norms, their understanding remains quite limited compared to human drivers. This suggests that more advanced AI techniques beyond just language processing will be needed to create truly autonomous driving systems that can navigate the complex social landscape of real-world road environments.
The research in this paper represents an important step in understanding the challenges and limitations of using LLMs for autonomous driving applications. By identifying these gaps, the field can work towards developing more robust and socially intelligent AI agents that can safely navigate the roads of the future.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Can LLMs Understand Social Norms in Autonomous Driving Games?
Boxuan Wang, Haonan Duan, Yanhao Feng, Xu Chen, Yongjie Fu, Zhaobin Mo, Xuan Di
Social norm is defined as a shared standard of acceptable behavior in a society. The emergence of social norms fosters coordination among agents without any hard-coded rules, which is crucial for the large-scale deployment of AVs in an intelligent transportation system. This paper explores the application of LLMs in understanding and modeling social norms in autonomous driving games. We introduce LLMs into autonomous driving games as intelligent agents who make decisions according to text prompts. These agents are referred to as LLM-based agents. Our framework involves LLM-based agents playing Markov games in a multi-agent system (MAS), allowing us to investigate the emergence of social norms among individual agents. We aim to identify social norms by designing prompts and utilizing LLMs on textual information related to the environment setup and the observations of LLM-based agents. Using the OpenAI Chat API powered by GPT-4.0, we conduct experiments to simulate interactions and evaluate the performance of LLM-based agents in two driving scenarios: unsignalized intersection and highway platoon. The results show that LLM-based agents can handle dynamically changing environments in Markov games, and social norms evolve among LLM-based agents in both scenarios. In the intersection game, LLM-based agents tend to adopt a conservative driving policy when facing a potential car crash. The advantage of LLM-based agents in games lies in their strong operability and analyzability, which facilitate experimental design.
Read more9/4/2024

0
Evolution of Social Norms in LLM Agents using Natural Language
Ilya Horiguchi, Takahide Yoshida, Takashi Ikegami
Recent advancements in Large Language Models (LLMs) have spurred a surge of interest in leveraging these models for game-theoretical simulations, where LLMs act as individual agents engaging in social interactions. This study explores the potential for LLM agents to spontaneously generate and adhere to normative strategies through natural language discourse, building upon the foundational work of Axelrod's metanorm games. Our experiments demonstrate that through dialogue, LLM agents can form complex social norms, such as metanorms-norms enforcing the punishment of those who do not punish cheating-purely through natural language interaction. The results affirm the effectiveness of using LLM agents for simulating social interactions and understanding the emergence and evolution of complex strategies and norms through natural language. Future work may extend these findings by incorporating a wider range of scenarios and agent characteristics, aiming to uncover more nuanced mechanisms behind social norm formation.
Read more9/4/2024
✨
0
LLM-Augmented Agent-Based Modelling for Social Simulations: Challenges and Opportunities
Onder Gurcan
As large language models (LLMs) continue to make significant strides, their better integration into agent-based simulations offers a transformational potential for understanding complex social systems. However, such integration is not trivial and poses numerous challenges. Based on this observation, in this paper, we explore architectures and methods to systematically develop LLM-augmented social simulations and discuss potential research directions in this field. We conclude that integrating LLMs with agent-based simulations offers a powerful toolset for researchers and scientists, allowing for more nuanced, realistic, and comprehensive models of complex systems and human behaviours.
Read more5/14/2024
0
In-context Learning for Automated Driving Scenarios
Ziqi Zhou, Jingyue Zhang, Jingyuan Zhang, Boyue Wang, Tianyu Shi, Alaa Khamis
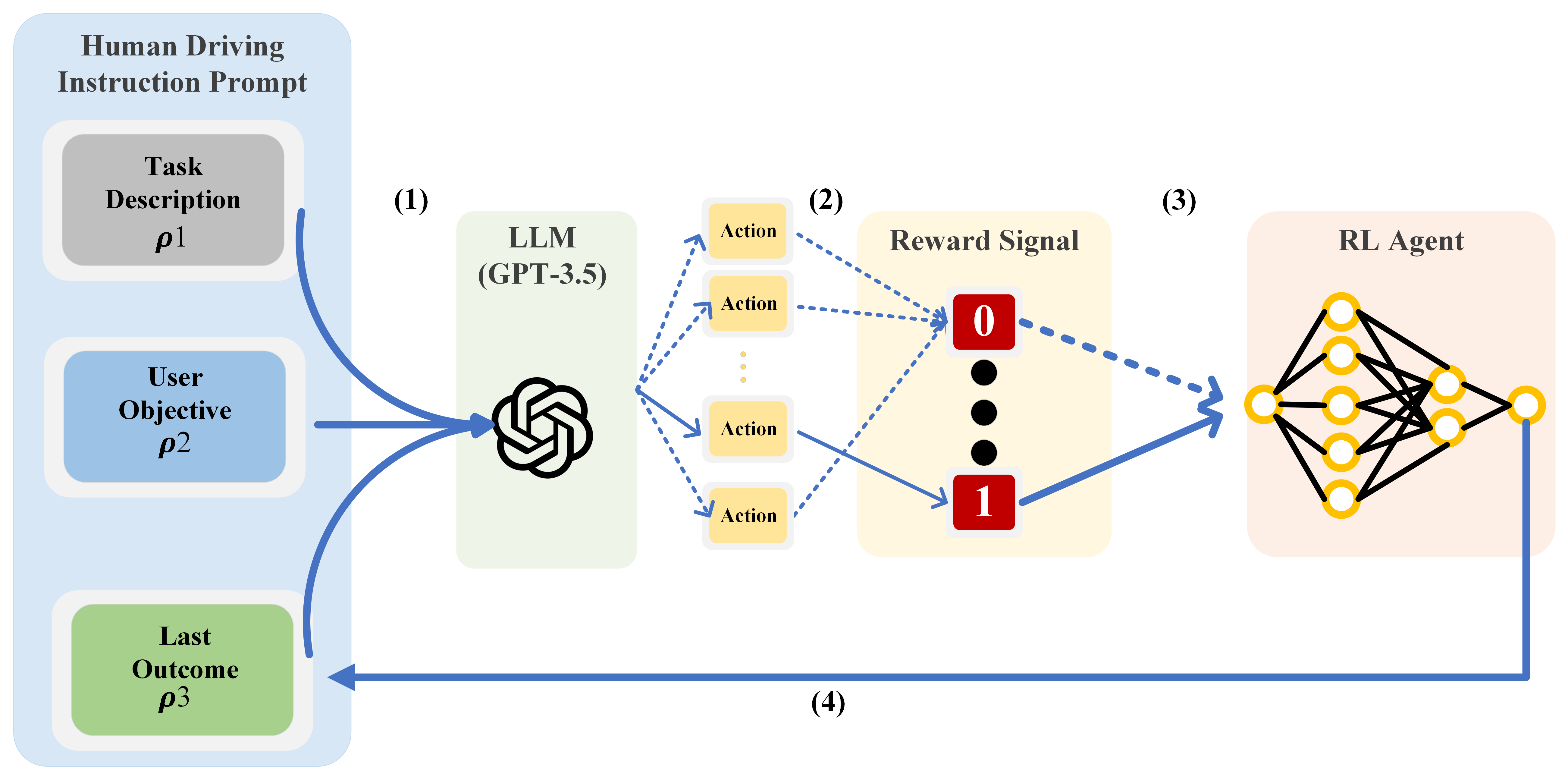
One of the key challenges in current Reinforcement Learning (RL)-based Automated Driving (AD) agents is achieving flexible, precise, and human-like behavior cost-effectively. This paper introduces an innovative approach utilizing Large Language Models (LLMs) to intuitively and effectively optimize RL reward functions in a human-centric way. We developed a framework where instructions and dynamic environment descriptions are input into the LLM. The LLM then utilizes this information to assist in generating rewards, thereby steering the behavior of RL agents towards patterns that more closely resemble human driving. The experimental results demonstrate that this approach not only makes RL agents more anthropomorphic but also reaches better performance. Additionally, various strategies for reward-proxy and reward-shaping are investigated, revealing the significant impact of prompt design on shaping an AD vehicle's behavior. These findings offer a promising direction for the development of more advanced and human-like automated driving systems. Our experimental data and source code can be found here.
Read more5/8/2024