LLM4Drive: A Survey of Large Language Models for Autonomous Driving

0
💬
Sign in to get full access
Overview
- Autonomous driving technology is transforming transportation and urban mobility.
- Traditional rule-based systems have limitations, while end-to-end data-driven approaches lack transparency.
- Large language models (LLMs) have capabilities that could empower autonomous driving systems.
- Combining LLMs with foundation vision models could lead to open-world understanding, reasoning, and few-shot learning.
- This paper systematically reviews the research area of "Large Language Models for Autonomous Driving (LLM4AD)".
Plain English Explanation
Autonomous driving technology is revolutionizing how we get around. Traditional systems that rely on predefined rules have limitations, as errors can accumulate across different modules. In contrast, end-to-end data-driven approaches have the potential to avoid error buildup, but they can be less transparent, making it harder to understand and validate the decisions they make.
Recently, large language models (LLMs) have shown impressive abilities, like understanding context, logical reasoning, and generating answers. Combining these LLMs with foundation vision models could open up new possibilities for autonomous driving systems, such as better understanding of the world around them, more robust reasoning, and the ability to learn new skills more quickly.
This paper takes a comprehensive look at the research being done in the field of "Large Language Models for Autonomous Driving" (LLM4AD). It evaluates the current state of the technology, outlines the key challenges, and suggests potential future directions. The goal is to provide a valuable resource for both academic and industry researchers working in this exciting and rapidly evolving area.
Technical Explanation
The paper systematically reviews the research on utilizing large language models (LLMs) to enhance autonomous driving systems, known as the "Large Language Models for Autonomous Driving" (LLM4AD) research area.
Traditional module-based autonomous driving systems are constrained by the accumulation of errors across cascaded modules and the inflexibility of pre-set rules. In contrast, end-to-end data-driven approaches have the potential to avoid error accumulation, but they often lack transparency, complicating the validation and traceability of decisions.
The paper explores how the capabilities of LLMs, such as understanding context, logical reasoning, and generating answers, could be leveraged to empower autonomous driving systems. By combining LLMs with foundation vision models, the research aims to enable open-world understanding, reasoning, and few-shot learning, which are currently lacking in many autonomous driving systems.
The paper provides a comprehensive review of the state of the art in the LLM4AD research field, outlining the key challenges and potential future directions. It also includes a designated link to a GitHub repository with real-time updates on the latest advances and relevant open-source resources.
Critical Analysis
The paper provides a thorough and insightful review of the research on utilizing large language models (LLMs) to enhance autonomous driving systems. However, it's important to note that the integration of LLMs into autonomous driving is still a nascent field, and there are potential challenges that the research must address.
One key limitation is the "black box" nature of many LLMs, which can make it difficult to understand and validate the decision-making process. While the paper suggests that combining LLMs with foundation vision models could improve transparency, further research is needed to ensure the safety and reliability of these systems.
Additionally, the paper does not delve deeply into the ethical and societal implications of deploying LLM-powered autonomous driving systems. Issues such as bias, privacy, and accountability must be carefully considered as this technology continues to develop.
Despite these caveats, the paper provides a valuable foundation for researchers and industry professionals working in the LLM4AD field. By highlighting the current state of the art and outlining future research directions, the paper helps to drive progress in this exciting and rapidly evolving area of autonomous driving technology.
Conclusion
This paper offers a comprehensive review of the research on leveraging large language models (LLMs) to enhance autonomous driving systems, known as the "Large Language Models for Autonomous Driving" (LLM4AD) field. The paper outlines how LLMs' capabilities, such as understanding context, logical reasoning, and generating answers, could be combined with foundation vision models to enable open-world understanding, reasoning, and few-shot learning in autonomous driving systems.
The paper provides a valuable resource for both academic and industry researchers working in this rapidly evolving area, with a designated link to real-time updates and relevant open-source resources. While the integration of LLMs into autonomous driving faces some challenges, such as the "black box" nature of many models, this research represents an important step towards more advanced, transparent, and adaptable autonomous driving technology that could have a significant impact on transportation and urban mobility.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
💬
0
LLM4Drive: A Survey of Large Language Models for Autonomous Driving
Zhenjie Yang, Xiaosong Jia, Hongyang Li, Junchi Yan
Autonomous driving technology, a catalyst for revolutionizing transportation and urban mobility, has the tend to transition from rule-based systems to data-driven strategies. Traditional module-based systems are constrained by cumulative errors among cascaded modules and inflexible pre-set rules. In contrast, end-to-end autonomous driving systems have the potential to avoid error accumulation due to their fully data-driven training process, although they often lack transparency due to their black box nature, complicating the validation and traceability of decisions. Recently, large language models (LLMs) have demonstrated abilities including understanding context, logical reasoning, and generating answers. A natural thought is to utilize these abilities to empower autonomous driving. By combining LLM with foundation vision models, it could open the door to open-world understanding, reasoning, and few-shot learning, which current autonomous driving systems are lacking. In this paper, we systematically review a research line about textit{Large Language Models for Autonomous Driving (LLM4AD)}. This study evaluates the current state of technological advancements, distinctly outlining the principal challenges and prospective directions for the field. For the convenience of researchers in academia and industry, we provide real-time updates on the latest advances in the field as well as relevant open-source resources via the designated link: https://github.com/Thinklab-SJTU/Awesome-LLM4AD.
Read more8/13/2024

0
Large Language Models for Human-like Autonomous Driving: A Survey
Yun Li, Kai Katsumata, Ehsan Javanmardi, Manabu Tsukada
Large Language Models (LLMs), AI models trained on massive text corpora with remarkable language understanding and generation capabilities, are transforming the field of Autonomous Driving (AD). As AD systems evolve from rule-based and optimization-based methods to learning-based techniques like deep reinforcement learning, they are now poised to embrace a third and more advanced category: knowledge-based AD empowered by LLMs. This shift promises to bring AD closer to human-like AD. However, integrating LLMs into AD systems poses challenges in real-time inference, safety assurance, and deployment costs. This survey provides a comprehensive and critical review of recent progress in leveraging LLMs for AD, focusing on their applications in modular AD pipelines and end-to-end AD systems. We highlight key advancements, identify pressing challenges, and propose promising research directions to bridge the gap between LLMs and AD, thereby facilitating the development of more human-like AD systems. The survey first introduces LLMs' key features and common training schemes, then delves into their applications in modular AD pipelines and end-to-end AD, respectively, followed by discussions on open challenges and future directions. Through this in-depth analysis, we aim to provide insights and inspiration for researchers and practitioners working at the intersection of AI and autonomous vehicles, ultimately contributing to safer, smarter, and more human-centric AD technologies.
Read more7/30/2024
0
A Superalignment Framework in Autonomous Driving with Large Language Models
Xiangrui Kong, Thomas Braunl, Marco Fahmi, Yue Wang
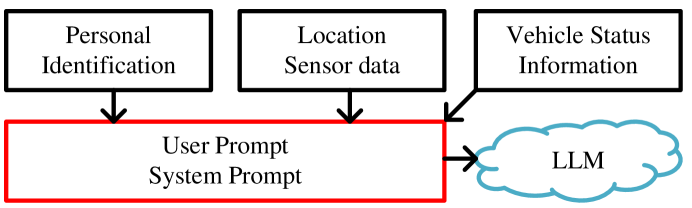
Over the last year, significant advancements have been made in the realms of large language models (LLMs) and multi-modal large language models (MLLMs), particularly in their application to autonomous driving. These models have showcased remarkable abilities in processing and interacting with complex information. In autonomous driving, LLMs and MLLMs are extensively used, requiring access to sensitive vehicle data such as precise locations, images, and road conditions. These data are transmitted to an LLM-based inference cloud for advanced analysis. However, concerns arise regarding data security, as the protection against data and privacy breaches primarily depends on the LLM's inherent security measures, without additional scrutiny or evaluation of the LLM's inference outputs. Despite its importance, the security aspect of LLMs in autonomous driving remains underexplored. Addressing this gap, our research introduces a novel security framework for autonomous vehicles, utilizing a multi-agent LLM approach. This framework is designed to safeguard sensitive information associated with autonomous vehicles from potential leaks, while also ensuring that LLM outputs adhere to driving regulations and align with human values. It includes mechanisms to filter out irrelevant queries and verify the safety and reliability of LLM outputs. Utilizing this framework, we evaluated the security, privacy, and cost aspects of eleven large language model-driven autonomous driving cues. Additionally, we performed QA tests on these driving prompts, which successfully demonstrated the framework's efficacy.
Read more6/11/2024

0
Hybrid Reasoning Based on Large Language Models for Autonomous Car Driving
Mehdi Azarafza, Mojtaba Nayyeri, Charles Steinmetz, Steffen Staab, Achim Rettberg
Large Language Models (LLMs) have garnered significant attention for their ability to understand text and images, generate human-like text, and perform complex reasoning tasks. However, their ability to generalize this advanced reasoning with a combination of natural language text for decision-making in dynamic situations requires further exploration. In this study, we investigate how well LLMs can adapt and apply a combination of arithmetic and common-sense reasoning, particularly in autonomous driving scenarios. We hypothesize that LLMs hybrid reasoning abilities can improve autonomous driving by enabling them to analyze detected object and sensor data, understand driving regulations and physical laws, and offer additional context. This addresses complex scenarios, like decisions in low visibility (due to weather conditions), where traditional methods might fall short. We evaluated Large Language Models (LLMs) based on accuracy by comparing their answers with human-generated ground truth inside CARLA. The results showed that when a combination of images (detected objects) and sensor data is fed into the LLM, it can offer precise information for brake and throttle control in autonomous vehicles across various weather conditions. This formulation and answers can assist in decision-making for auto-pilot systems.
Read more8/20/2024