Characterizing the Complexity of Social Robot Navigation Scenarios

0

Sign in to get full access
Overview
- This paper characterizes the complexity of social robot navigation scenarios, which involve robots navigating in crowded environments while considering social norms and human interactions.
- The authors propose a framework for quantifying the complexity of these scenarios using a combination of objective metrics and subjective human assessments.
- The paper also presents a set of representative social navigation scenarios and evaluates them using the proposed framework, providing insights into the key factors that contribute to scenario complexity.
Plain English Explanation
Social robots, like service robots or self-driving cars, need to navigate through crowded environments while being mindful of social norms and interactions with people. This paper looks at ways to measure how complex these social navigation scenarios can be.
The researchers created a framework that uses a mix of objective metrics, like the number of people in the environment and the level of clutter, as well as subjective assessments from humans to quantify the complexity of different social navigation scenarios. They then evaluated a set of example scenarios using this framework to understand what factors make them more or less complex.
This is important because as robots become more advanced and need to navigate crowded, social environments, it's crucial to be able to assess the difficulty of these situations. This can help robot developers design better algorithms and train the robots to handle a wide range of social navigation challenges.
Technical Explanation
The paper proposes a framework for characterizing the complexity of social robot navigation scenarios. The framework combines objective metrics, such as the number of people in the environment, their motion patterns, and the level of clutter, with subjective human assessments of the scenario complexity.
The authors first define a set of representative social navigation scenarios, including crossing a crowded hallway, navigating a busy intersection, and following a person through a cluttered environment. They then develop a suite of objective metrics to quantify the complexity of these scenarios, such as the number of pedestrians, the number of potential collisions, and the level of environment structure.
To capture the subjective human perception of complexity, the researchers conducted a user study where participants were asked to assess the difficulty of the scenarios. The participants' responses were then incorporated into the overall complexity metric.
The paper's key finding is that the proposed framework can effectively capture the complexity of social navigation scenarios, with the objective and subjective measures providing complementary insights. The authors also identify the critical factors that contribute to scenario complexity, such as the number of people, the level of environment structure, and the degree of social interaction required.
The framework and the insights from the evaluation of the representative scenarios can inform the design of more robust social navigation algorithms and the development of training environments that effectively capture the challenges of real-world social robot navigation.
Critical Analysis
The paper provides a comprehensive and well-designed framework for characterizing the complexity of social robot navigation scenarios. The combination of objective metrics and subjective human assessments is a valuable approach, as it captures both the quantifiable aspects of scenario complexity as well as the nuanced, context-dependent perceptions of difficulty.
However, the paper could have delved deeper into the limitations and potential biases of the subjective assessment process. For example, the participants' prior experiences, cultural backgrounds, and personal preferences may have influenced their perceptions of scenario complexity, and these factors could be further explored.
Additionally, while the representative scenarios presented in the paper provide a good starting point, the authors could have considered a more diverse set of scenarios, including those with different environmental layouts, social dynamics, and robot capabilities. This could help to further validate the generalizability of the proposed framework.
As the field of social robot navigation continues to evolve, it will be important to consider the ethical implications of how robots navigate in crowded, human-centric environments. The framework presented in this paper could be expanded to incorporate considerations around safety, fairness, and human-robot trust.
Conclusion
This paper presents a comprehensive framework for characterizing the complexity of social robot navigation scenarios, which is a critical challenge as robots become more advanced and need to navigate crowded, interactive environments. The proposed framework combines objective metrics and subjective human assessments to quantify scenario complexity, and the evaluation of representative scenarios provides valuable insights into the key factors that contribute to this complexity.
The insights from this research can inform the development of more robust social navigation algorithms and the creation of training environments that effectively capture the challenges of real-world social robot navigation. As the field continues to evolve, it will be important to consider the ethical implications of how robots navigate in human-centric environments.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Characterizing the Complexity of Social Robot Navigation Scenarios
Andrew Stratton, Kris Hauser, Christoforos Mavrogiannis
Social robot navigation algorithms are often demonstrated in overly simplified scenarios, prohibiting the extraction of practical insights about their relevance to real world domains. Our key insight is that an understanding of the inherent complexity of a social robot navigation scenario could help characterize the limitations of existing navigation algorithms and provide actionable directions for improvement. Through an exploration of recent literature, we identify a series of factors contributing to the complexity of a scenario, disambiguating between contextual and robot-related ones. We then conduct a simulation study investigating how manipulations of contextual factors impact the performance of a variety of navigation algorithms. We find that dense and narrow environments correlate most strongly with performance drops, while the heterogeneity of agent policies and directionality of interactions have a less pronounced effect. This motivates a shift towards developing and testing algorithms under higher-complexity settings.
Read more5/21/2024
0
Online Context Learning for Socially-compliant Navigation
Iaroslav Okunevich, Alexandre Lombard, Tomas Krajnik, Yassine Ruichek, Zhi Yan
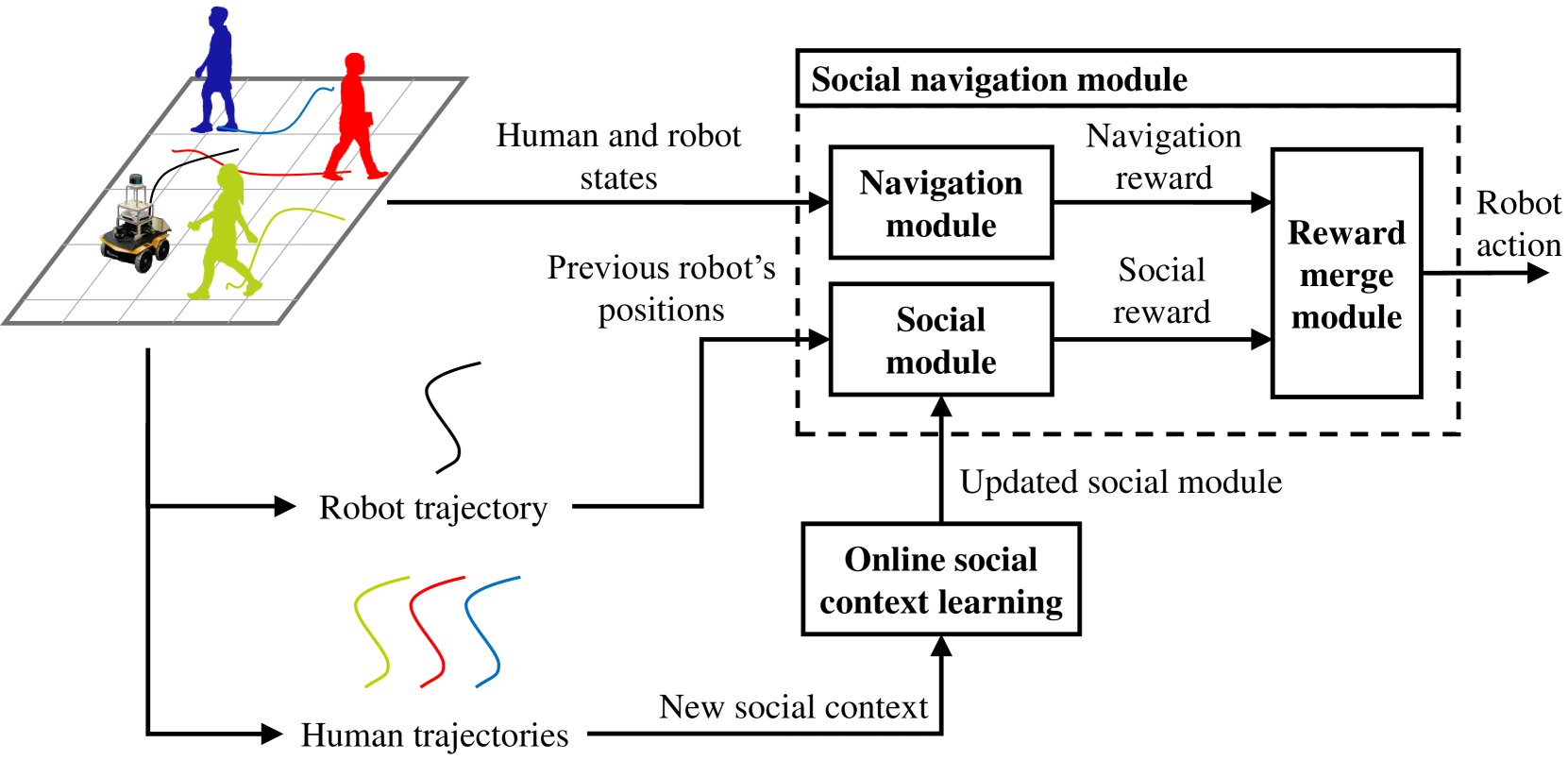
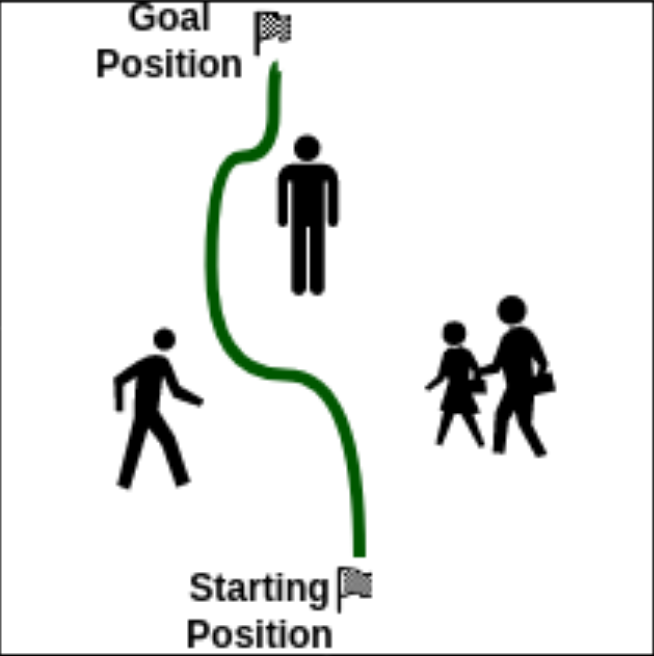
Robot social navigation needs to adapt to different human factors and environmental contexts. However, since these factors and contexts are difficult to predict and cannot be exhaustively enumerated, traditional learning-based methods have difficulty in ensuring the social attributes of robots in long-term and cross-environment deployments. This letter introduces an online context learning method that aims to empower robots to adapt to new social environments online. The proposed method adopts a two-layer structure. The bottom layer is built using a deep reinforcement learning-based method to ensure the output of basic robot navigation commands. The upper layer is implemented using an online robot learning-based method to socialize the control commands suggested by the bottom layer. Experiments using a community-wide simulator show that our method outperforms the state-of-the-art ones. Experimental results in the most challenging scenarios show that our method improves the performance of the state-of-the-art by 8%. The source code of the proposed method, the data used, and the tools for the per-training step will be publicly available at https://github.com/Nedzhaken/SOCSARL-OL.
Read more6/18/2024

0
SHINE: Social Homology Identification for Navigation in Crowded Environments
Diego Martinez-Baselga, Oscar de Groot, Luzia Knoedler, Luis Riazuelo, Javier Alonso-Mora, Luis Montano
Navigating mobile robots in social environments remains a challenging task due to the intricacies of human-robot interactions. Most of the motion planners designed for crowded and dynamic environments focus on choosing the best velocity to reach the goal while avoiding collisions, but do not explicitly consider the high-level navigation behavior (avoiding through the left or right side, letting others pass or passing before others, etc.). In this work, we present a novel motion planner that incorporates topology distinct paths representing diverse navigation strategies around humans. The planner selects the topology class that imitates human behavior the best using a deep neural network model trained on real-world human motion data, ensuring socially intelligent and contextually aware navigation. Our system refines the chosen path through an optimization-based local planner in real time, ensuring seamless adherence to desired social behaviors. In this way, we decouple perception and local planning from the decision-making process. We evaluate the prediction accuracy of the network with real-world data. In addition, we assess the navigation capabilities in both simulation and a real-world platform, comparing it with other state-of-the-art planners. We demonstrate that our planner exhibits socially desirable behaviors and shows a smooth and remarkable performance.
Read more4/26/2024
0
Learning Early Social Maneuvers for Enhanced Social Navigation
Yigit Yildirim, Mehmet Suzer, Emre Ugur
Socially compliant navigation is an integral part of safety features in Human-Robot Interaction. Traditional approaches to mobile navigation prioritize physical aspects, such as efficiency, but social behaviors gain traction as robots appear more in daily life. Recent techniques to improve the social compliance of navigation often rely on predefined features or reward functions, introducing assumptions about social human behavior. To address this limitation, we propose a novel Learning from Demonstration (LfD) framework for social navigation that exclusively utilizes raw sensory data. Additionally, the proposed system contains mechanisms to consider the future paths of the surrounding pedestrians, acknowledging the temporal aspect of the problem. The final product is expected to reduce the anxiety of people sharing their environment with a mobile robot, helping them trust that the robot is aware of their presence and will not harm them. As the framework is currently being developed, we outline its components, present experimental results, and discuss future work towards realizing this framework.
Read more5/3/2024