Classification under Nuisance Parameters and Generalized Label Shift in Likelihood-Free Inference

0

Sign in to get full access
Overview
- This paper discusses the problem of classification under nuisance parameters and generalized label shift in likelihood-free inference.
- It proposes a set-valued classifier that can handle these challenges and demonstrates its effectiveness through simulations in the context of biology and physics.
- The research aims to improve the robustness and reliability of classification tasks in fields where systematic uncertainties and label shifts are common.
Plain English Explanation
In many real-world problems, such as in biology and physics, the data we collect can be influenced by factors that we don't fully understand or can't easily measure. These hidden factors, known as "nuisance parameters," can make it challenging to accurately classify or identify the underlying phenomenon we're interested in.
Additionally, the relationship between the observed data and the true labels or categories can sometimes change over time or across different settings. This is called "label shift," and it can further complicate the classification task.
This paper introduces a new approach called a "set-valued classifier" that can handle these challenges. Instead of giving a single classification result, the set-valued classifier provides a range of possible labels that are consistent with the observed data and the uncertainties involved.
By using this more flexible approach, the researchers were able to demonstrate improved performance in simulated classification problems that mimic the challenges faced in real-world applications like biology and physics. This could lead to more robust and reliable classification systems in fields where systematic uncertainties and label shifts are common.
Technical Explanation
The paper proposes a set-valued classifier that can handle classification tasks in the presence of nuisance parameters and generalized label shift. This is a common problem in likelihood-free inference, where the underlying probability distribution is not known, and traditional classification methods may struggle.
The set-valued classifier works by generating a range of possible labels that are consistent with the observed data and the uncertainties involved. This is done through a simulation-based approach, where the researchers generate synthetic data under different possible scenarios and then use this to inform the classification process.
The authors demonstrate the effectiveness of their approach through a series of simulations that mimic the challenges faced in real-world applications, such as in biology and physics. They show that the set-valued classifier can outperform traditional approaches, particularly in situations where there are significant nuisance parameters or label shifts.
Critical Analysis
The paper presents a novel and promising approach to handling classification tasks in the presence of nuisance parameters and label shifts. The set-valued classifier offers a more flexible and robust solution compared to traditional methods, which can be particularly useful in fields like biology and physics where these challenges are common.
One potential limitation of the approach is the computational burden of the simulation-based inference process. This could make it less practical for some real-time or large-scale applications, and the authors acknowledge the need for further research to improve the efficiency of the method.
Another area that could be explored is the potential for incorporating additional domain-specific knowledge or constraints into the set-valued classifier. This could help to further improve the accuracy and interpretability of the results, particularly in fields where expert knowledge is available.
Overall, this research represents an important step forward in the field of likelihood-free inference and classification under uncertainty. The set-valued classifier offers a promising approach for addressing these challenges, and the authors have demonstrated its potential through their simulations. Further development and real-world application of this method could lead to significant advancements in fields where robust and reliable classification is crucial.
Conclusion
This paper presents a novel set-valued classifier that can handle classification tasks in the presence of nuisance parameters and generalized label shift. The researchers have demonstrated the effectiveness of their approach through simulations in the context of biology and physics, where these challenges are common.
The set-valued classifier offers a more flexible and robust solution compared to traditional classification methods, providing a range of possible labels that are consistent with the observed data and the uncertainties involved. This could lead to significant improvements in the reliability and accuracy of classification systems in fields where systematic uncertainties and label shifts are a concern.
While the computational burden of the simulation-based inference process may be a limitation, the authors have acknowledged this and discussed potential avenues for further research and development. Overall, this work represents an important contribution to the field of likelihood-free inference and has the potential to have a meaningful impact on various scientific and technological domains.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Classification under Nuisance Parameters and Generalized Label Shift in Likelihood-Free Inference
Luca Masserano, Alex Shen, Michele Doro, Tommaso Dorigo, Rafael Izbicki, Ann B. Lee
An open scientific challenge is how to classify events with reliable measures of uncertainty, when we have a mechanistic model of the data-generating process but the distribution over both labels and latent nuisance parameters is different between train and target data. We refer to this type of distributional shift as generalized label shift (GLS). Direct classification using observed data $mathbf{X}$ as covariates leads to biased predictions and invalid uncertainty estimates of labels $Y$. We overcome these biases by proposing a new method for robust uncertainty quantification that casts classification as a hypothesis testing problem under nuisance parameters. The key idea is to estimate the classifier's receiver operating characteristic (ROC) across the entire nuisance parameter space, which allows us to devise cutoffs that are invariant under GLS. Our method effectively endows a pre-trained classifier with domain adaptation capabilities and returns valid prediction sets while maintaining high power. We demonstrate its performance on two challenging scientific problems in biology and astroparticle physics with data from realistic mechanistic models.
Read more7/2/2024

0
When Invariant Representation Learning Meets Label Shift: Insufficiency and Theoretical Insights
You-Wei Luo, Chuan-Xian Ren
As a crucial step toward real-world learning scenarios with changing environments, dataset shift theory and invariant representation learning algorithm have been extensively studied to relax the identical distribution assumption in classical learning setting. Among the different assumptions on the essential of shifting distributions, generalized label shift (GLS) is the latest developed one which shows great potential to deal with the complex factors within the shift. In this paper, we aim to explore the limitations of current dataset shift theory and algorithm, and further provide new insights by presenting a comprehensive understanding of GLS. From theoretical aspect, two informative generalization bounds are derived, and the GLS learner is proved to be sufficiently close to optimal target model from the Bayesian perspective. The main results show the insufficiency of invariant representation learning, and prove the sufficiency and necessity of GLS correction for generalization, which provide theoretical supports and innovations for exploring generalizable model under dataset shift. From methodological aspect, we provide a unified view of existing shift correction frameworks, and propose a kernel embedding-based correction algorithm (KECA) to minimize the generalization error and achieve successful knowledge transfer. Both theoretical results and extensive experiment evaluations demonstrate the sufficiency and necessity of GLS correction for addressing dataset shift and the superiority of proposed algorithm.
Read more6/26/2024
📊
0
Nuisances via Negativa: Adjusting for Spurious Correlations via Data Augmentation
Aahlad Puli, Nitish Joshi, Yoav Wald, He He, Rajesh Ranganath
In prediction tasks, there exist features that are related to the label in the same way across different settings for that task; these are semantic features or semantics. Features with varying relationships to the label are nuisances. For example, in detecting cows from natural images, the shape of the head is semantic but because images of cows often have grass backgrounds but not always, the background is a nuisance. Models that exploit nuisance-label relationships face performance degradation when these relationships change. Building models robust to such changes requires additional knowledge beyond samples of the features and labels. For example, existing work uses annotations of nuisances or assumes ERM-trained models depend on nuisances. Approaches to integrate new kinds of additional knowledge enlarge the settings where robust models can be built. We develop an approach to use knowledge about the semantics by corrupting them in data, and then using the corrupted data to produce models which identify correlations between nuisances and the label. Once these correlations are identified, they can be used to adjust for where nuisances drive predictions. We study semantic corruptions in powering different spurious-correlation avoiding methods on multiple out-of-distribution (OOD) tasks like classifying waterbirds, natural language inference (NLI), and detecting cardiomegaly in chest X-rays.
Read more7/4/2024
0
Quantifying Distribution Shifts and Uncertainties for Enhanced Model Robustness in Machine Learning Applications
Vegard Flovik
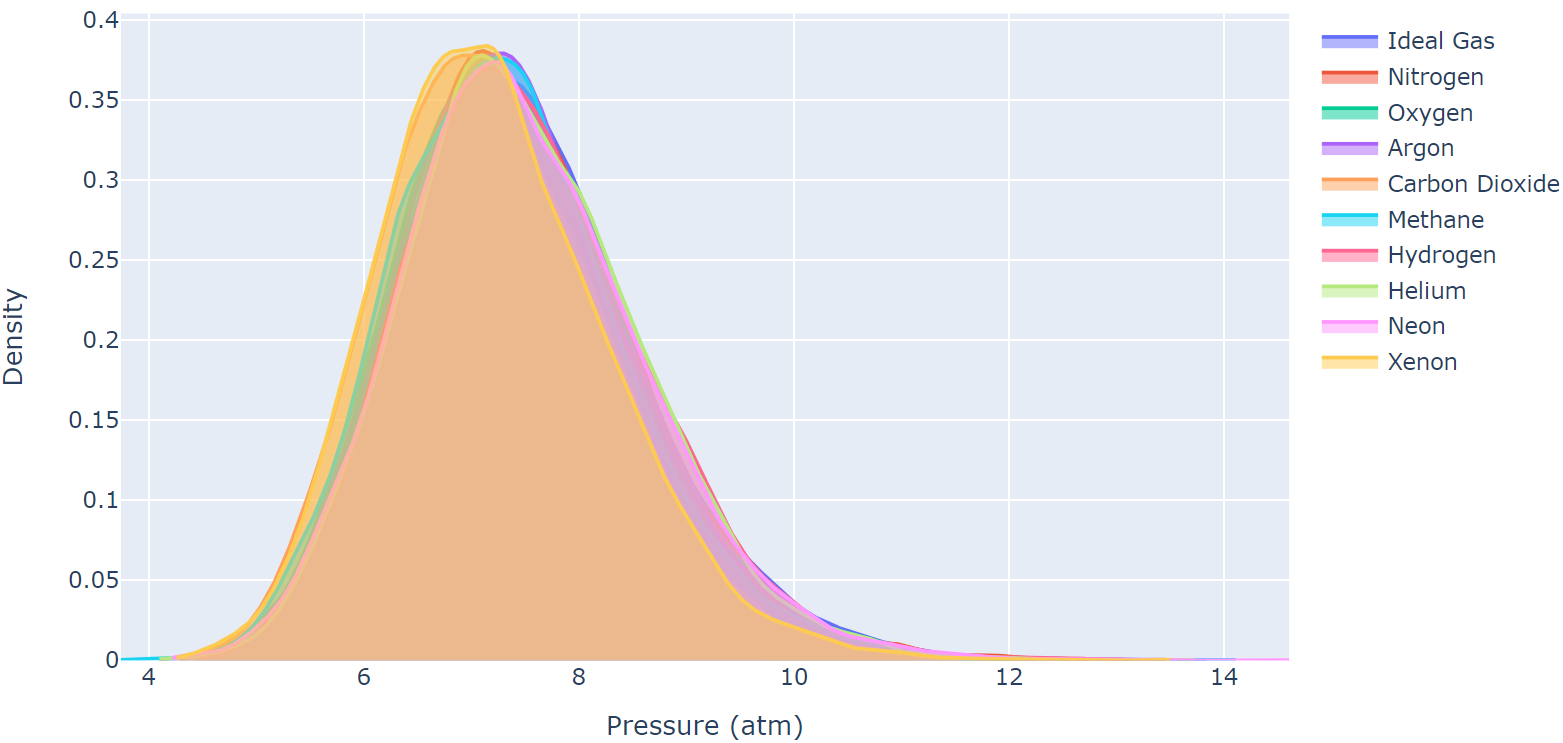
Distribution shifts, where statistical properties differ between training and test datasets, present a significant challenge in real-world machine learning applications where they directly impact model generalization and robustness. In this study, we explore model adaptation and generalization by utilizing synthetic data to systematically address distributional disparities. Our investigation aims to identify the prerequisites for successful model adaptation across diverse data distributions, while quantifying the associated uncertainties. Specifically, we generate synthetic data using the Van der Waals equation for gases and employ quantitative measures such as Kullback-Leibler divergence, Jensen-Shannon distance, and Mahalanobis distance to assess data similarity. These metrics en able us to evaluate both model accuracy and quantify the associated uncertainty in predictions arising from data distribution shifts. Our findings suggest that utilizing statistical measures, such as the Mahalanobis distance, to determine whether model predictions fall within the low-error interpolation regime or the high-error extrapolation regime provides a complementary method for assessing distribution shift and model uncertainty. These insights hold significant value for enhancing model robustness and generalization, essential for the successful deployment of machine learning applications in real-world scenarios.
Read more5/6/2024