Transparent Object Depth Completion

0

Sign in to get full access
Overview
- This paper presents a novel approach to transparent object depth completion, which aims to infer the complete depth map of a transparent object from a single RGB-D (color and depth) image.
- The proposed method leverages both the color and depth information in the input image to accurately estimate the missing depth values for transparent regions.
- The authors demonstrate the effectiveness of their approach through extensive experiments and comparisons with state-of-the-art methods on real-world datasets.
Plain English Explanation
Transparent objects, such as glass or clear plastic, can be challenging for depth cameras to accurately measure. This is because the light can pass through the object, making it difficult to determine the true depth. The Transparent Object Depth Completion paper introduces a new way to address this problem.
The key idea is to use both the color (RGB) and depth (D) information in the camera image to infer the complete depth map of the transparent object. The researchers developed a specialized algorithm that can "fill in" the missing depth values in the transparent regions of the image. This allows for a more accurate 3D representation of the transparent object.
To demonstrate the effectiveness of their approach, the authors tested their method on real-world datasets and compared it to other state-of-the-art techniques. The results show that their transparent object depth completion algorithm outperforms existing methods, providing a more reliable way to capture the 3D shape of transparent objects.
This advance could have important applications in areas like robotic grasping, autonomous navigation, and 3D scene understanding, where accurate depth information is crucial for tasks like object detection and avoidance.
Technical Explanation
The Transparent Object Depth Completion paper presents a novel approach to inferring the complete depth map of transparent objects from a single RGB-D image. The key innovation is the use of a specialized neural network architecture that integrates both color and depth information to accurately estimate the missing depth values in transparent regions.
The proposed method consists of two main components: a depth completion network and a fusion module. The depth completion network takes the input RGB-D image and generates a preliminary depth map, focusing on the transparent regions. The fusion module then combines this depth information with the original color image to produce the final, complete depth map.
The authors leverage several techniques to enhance the performance of their approach, including a perceptual attention mechanism and a multi-scale fusion strategy. The perceptual attention module helps the network focus on the most important visual cues, while the multi-scale fusion allows the model to capture depth information at different levels of detail.
To evaluate their method, the researchers conducted extensive experiments on real-world datasets, including DEPTH-AWAKE and RGBD-FUSION. The results demonstrate that their transparent object depth completion approach outperforms state-of-the-art methods in terms of depth estimation accuracy, especially for transparent regions.
Critical Analysis
The Transparent Object Depth Completion paper presents a promising solution to a challenging problem in computer vision and robotics. The authors' approach of leveraging both color and depth information to infer the complete depth map of transparent objects is well-designed and the experimental results are impressive.
However, the paper does not address some potential limitations of the proposed method. For example, the performance of the algorithm may be influenced by factors such as lighting conditions, object materials, or camera calibration, which are not thoroughly investigated. Additionally, the method has been tested on a limited number of datasets, and its generalizability to a wider range of transparent objects and scenes remains to be explored.
Furthermore, while the authors highlight the potential applications of their work in areas like robotics and 3D scene understanding, they do not provide a detailed discussion of the real-world implications and practical challenges that may arise in deploying such a system. Addressing these aspects could strengthen the overall impact and significance of the research.
Despite these minor limitations, the Transparent Object Depth Completion paper represents an important contribution to the field of computer vision and depth estimation. The proposed approach demonstrates the potential for combining color and depth information to overcome the challenges posed by transparent objects, opening up new possibilities for more robust and accurate 3D scene understanding.
Conclusion
The Transparent Object Depth Completion paper introduces a novel method for inferring the complete depth map of transparent objects from a single RGB-D image. By leveraging both color and depth information, the proposed approach can accurately estimate the missing depth values in transparent regions, outperforming state-of-the-art techniques.
This research has significant implications for applications such as robotic grasping, autonomous navigation, and 3D scene understanding, where accurate depth information is crucial. The authors' findings demonstrate the potential for combining advanced computer vision techniques to overcome the challenges posed by transparent objects, a common problem in real-world environments.
While the paper has a few limitations, such as the need for further investigation into the method's robustness and generalizability, the Transparent Object Depth Completion approach represents an important step forward in the field of depth estimation. Continued research and development in this area could lead to significant advancements in our ability to perceive and understand the 3D world around us.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Transparent Object Depth Completion
Yifan Zhou, Wanli Peng, Zhongyu Yang, He Liu, Yi Sun
The perception of transparent objects for grasp and manipulation remains a major challenge, because existing robotic grasp methods which heavily rely on depth maps are not suitable for transparent objects due to their unique visual properties. These properties lead to gaps and inaccuracies in the depth maps of the transparent objects captured by depth sensors. To address this issue, we propose an end-to-end network for transparent object depth completion that combines the strengths of single-view RGB-D based depth completion and multi-view depth estimation. Moreover, we introduce a depth refinement module based on confidence estimation to fuse predicted depth maps from single-view and multi-view modules, which further refines the restored depth map. The extensive experiments on the ClearPose and TransCG datasets demonstrate that our method achieves superior accuracy and robustness in complex scenarios with significant occlusion compared to the state-of-the-art methods.
Read more5/27/2024
0
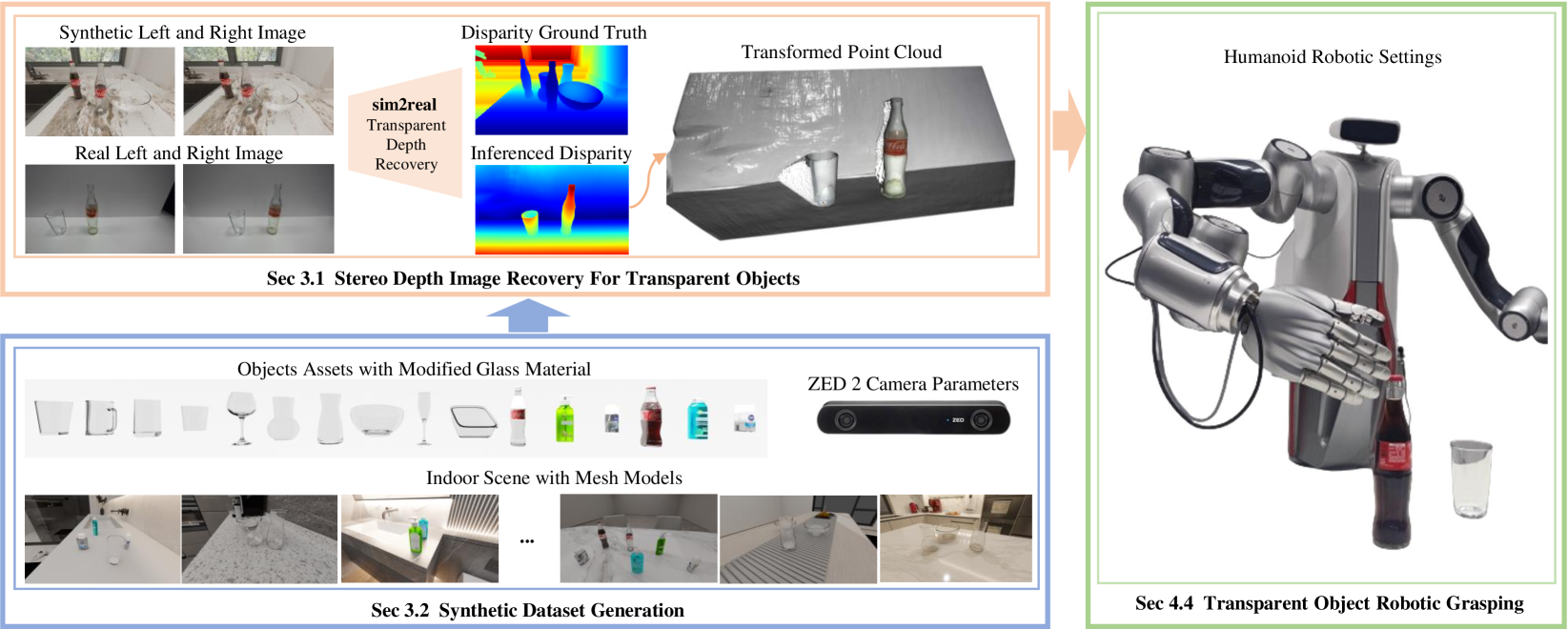
New!ClearDepth: Enhanced Stereo Perception of Transparent Objects for Robotic Manipulation
Kaixin Bai, Huajian Zeng, Lei Zhang, Yiwen Liu, Hongli Xu, Zhaopeng Chen, Jianwei Zhang
Transparent object depth perception poses a challenge in everyday life and logistics, primarily due to the inability of standard 3D sensors to accurately capture depth on transparent or reflective surfaces. This limitation significantly affects depth map and point cloud-reliant applications, especially in robotic manipulation. We developed a vision transformer-based algorithm for stereo depth recovery of transparent objects. This approach is complemented by an innovative feature post-fusion module, which enhances the accuracy of depth recovery by structural features in images. To address the high costs associated with dataset collection for stereo camera-based perception of transparent objects, our method incorporates a parameter-aligned, domain-adaptive, and physically realistic Sim2Real simulation for efficient data generation, accelerated by AI algorithm. Our experimental results demonstrate the model's exceptional Sim2Real generalizability in real-world scenarios, enabling precise depth mapping of transparent objects to assist in robotic manipulation. Project details are available at https://sites.google.com/view/cleardepth/ .
Read more9/16/2024

0
Depth Restoration of Hand-Held Transparent Objects for Human-to-Robot Handover
Ran Yu, Haixin Yu, Huang Yan, Ziwu Song, Shoujie Li, Wenbo Ding
Transparent objects are common in daily life, while their unique optical properties pose challenges for RGB-D cameras, which struggle to capture accurate depth information. For assistant robots, accurately perceiving transparent objects held by humans is essential for effective human-robot interaction. This paper presents a Hand-Aware Depth Restoration (HADR) method for hand-held transparent objects based on creating an implicit neural representation function from a single RGB-D image. The proposed method introduces the hand posture as an important guidance to leverage semantic and geometric information. To train and evaluate the proposed method, we create a high-fidelity synthetic dataset called TransHand-14K with a real-to-sim data generation scheme. Experiments show that our method has a better performance and generalization ability compared with existing methods. We further develop a real-world human-to-robot handover system based on the proposed depth restoration method, demonstrating its application value in human-robot interaction.
Read more8/28/2024
0
DistillGrasp: Integrating Features Correlation with Knowledge Distillation for Depth Completion of Transparent Objects
Yiheng Huang, Junhong Chen, Nick Michiels, Muhammad Asim, Luc Claesen, Wenyin Liu
Due to the visual properties of reflection and refraction, RGB-D cameras cannot accurately capture the depth of transparent objects, leading to incomplete depth maps. To fill in the missing points, recent studies tend to explore new visual features and design complex networks to reconstruct the depth, however, these approaches tremendously increase computation, and the correlation of different visual features remains a problem. To this end, we propose an efficient depth completion network named DistillGrasp which distillates knowledge from the teacher branch to the student branch. Specifically, in the teacher branch, we design a position correlation block (PCB) that leverages RGB images as the query and key to search for the corresponding values, guiding the model to establish correct correspondence between two features and transfer it to the transparent areas. For the student branch, we propose a consistent feature correlation module (CFCM) that retains the reliable regions of RGB images and depth maps respectively according to the consistency and adopts a CNN to capture the pairwise relationship for depth completion. To avoid the student branch only learning regional features from the teacher branch, we devise a distillation loss that not only considers the distance loss but also the object structure and edge information. Extensive experiments conducted on the ClearGrasp dataset manifest that our teacher network outperforms state-of-the-art methods in terms of accuracy and generalization, and the student network achieves competitive results with a higher speed of 48 FPS. In addition, the significant improvement in a real-world robotic grasping system illustrates the effectiveness and robustness of our proposed system.
Read more8/2/2024