Depth Restoration of Hand-Held Transparent Objects for Human-to-Robot Handover

0

Sign in to get full access
Overview
- This paper proposes a method for restoring the depth of hand-held transparent objects during a human-to-robot handover task.
- The key idea is to use a neural network to estimate the missing depth information in RGB-D images of transparent objects.
- The proposed approach aims to enable robots to safely and reliably grasp and manipulate transparent objects.
Plain English Explanation
The paper focuses on the challenge of grasping and handling transparent objects, which can be difficult for robots to perceive and interact with. When a person hands a transparent object, like a glass, to a robot, the robot may struggle to accurately determine the object's shape and position.
To address this, the researchers developed a neural network that can estimate the missing depth information in RGB-D (color and depth) images of transparent objects. By filling in the gaps in the depth data, the robot can better understand the 3D structure of the object and plan how to grasp it safely.
The key idea is to train the neural network on a dataset of transparent objects, teaching it to recognize patterns and reconstruct the missing depth information. This allows the robot to see the transparent object more clearly, even though the depth sensor may have trouble capturing all the details.
The researchers tested their approach on a variety of transparent objects, and found that it could significantly improve the robot's ability to accurately grasp and manipulate these challenging items during a handover task. This could have important applications in areas like assistive robotics, where robots need to reliably handle fragile or hard-to-see objects.
Technical Explanation
The paper presents a depth restoration approach for enabling robots to safely grasp and manipulate transparent objects during a human-to-robot handover task. The core of the method is a neural network that takes an RGB-D image of a transparent object as input and outputs a depth-completed version of the image.
The network is trained on a dataset of transparent objects, using both ground truth depth information and synthetically generated depth maps. This allows the model to learn patterns and regularities that can be used to fill in missing depth data caused by the limitations of depth sensors when viewing transparent surfaces.
The researchers evaluate their approach on a range of transparent objects, both in simulation and in real-world experiments. They find that the depth-completed images significantly improve the robot's ability to accurately grasp and manipulate the objects, compared to using the original depth maps alone.
Additionally, the paper discusses various architectural choices and training strategies that were explored to optimize the depth restoration performance.
Critical Analysis
The paper presents a compelling approach to a challenging problem in robotics, but there are a few potential limitations and areas for further research:
-
The dataset used for training the depth restoration network may not fully capture the diversity of transparent objects encountered in real-world scenarios. Expanding the dataset could improve the generalization of the method.
-
The paper focuses on a single handover task, but the depth restoration technique could potentially be applied to other robot manipulation tasks involving transparent objects. Evaluating the method in a wider range of applications could further demonstrate its utility.
-
While the depth restoration approach improves grasping performance, there may be additional factors, such as object stability or surface properties, that influence the robot's ability to safely and reliably handle transparent objects. Incorporating these considerations could lead to more robust grasping and manipulation strategies.
Overall, the paper presents a valuable contribution to the field of robot perception and manipulation, particularly for dealing with the challenges posed by transparent objects. The depth restoration technique has the potential to enhance the capabilities of robots in a variety of applications, and the insights gained from this work could inspire further advancements in this area.
Conclusion
This paper introduces a depth restoration approach for enabling robots to better perceive and manipulate transparent objects during human-to-robot handover tasks. By using a neural network to estimate the missing depth information in RGB-D images, the robot can more accurately understand the 3D structure of the object and plan its grasping and manipulation strategies accordingly.
The evaluation results demonstrate the effectiveness of the proposed method, which can significantly improve the robot's ability to reliably grasp and handle transparent objects. This work has important implications for robotics applications where safe and reliable interaction with fragile or hard-to-see objects is crucial, such as in assistive robotics or industrial settings.
While the paper focuses on a specific handover task, the depth restoration technique could potentially be applied more broadly to other robot manipulation scenarios involving transparent objects. Further research could explore ways to expand the approach, such as by incorporating additional contextual information or addressing other factors that influence the robot's handling of transparent items.
Overall, this paper provides a valuable contribution to the field of robot perception and manipulation, highlighting the importance of addressing the unique challenges posed by transparent objects and offering a promising solution to this problem.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Depth Restoration of Hand-Held Transparent Objects for Human-to-Robot Handover
Ran Yu, Haixin Yu, Shoujie Li, Huang Yan, Ziwu Song, Wenbo Ding
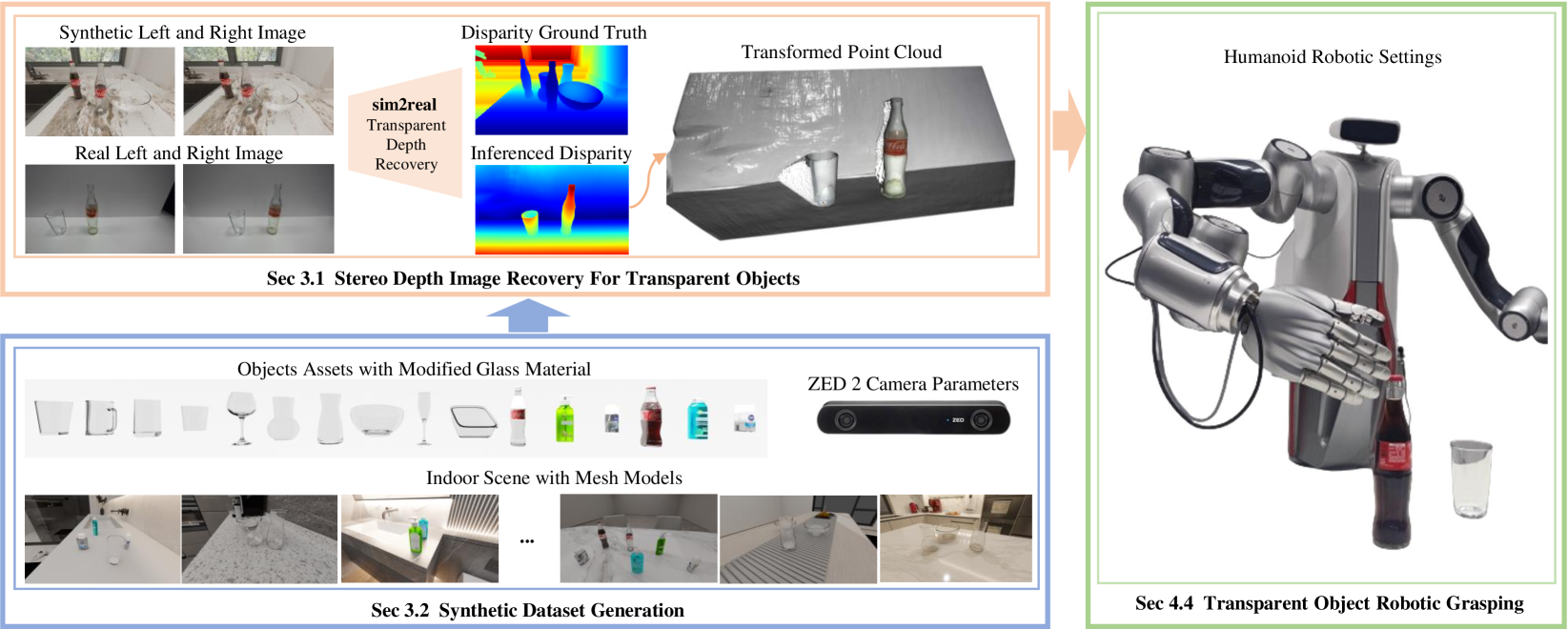
Transparent objects are common in daily life, while their optical properties pose challenges for RGB-D cameras to capture accurate depth information. This issue is further amplified when these objects are hand-held, as hand occlusions further complicate depth estimation. For assistant robots, however, accurately perceiving hand-held transparent objects is critical to effective human-robot interaction. This paper presents a Hand-Aware Depth Restoration (HADR) method based on creating an implicit neural representation function from a single RGB-D image. The proposed method utilizes hand posture as an important guidance to leverage semantic and geometric information of hand-object interaction. To train and evaluate the proposed method, we create a high-fidelity synthetic dataset named TransHand-14K with a real-to-sim data generation scheme. Experiments show that our method has better performance and generalization ability compared with existing methods. We further develop a real-world human-to-robot handover system based on HADR, demonstrating its potential in human-robot interaction applications.
Read more9/17/2024

0
Transparent Object Depth Completion
Yifan Zhou, Wanli Peng, Zhongyu Yang, He Liu, Yi Sun
The perception of transparent objects for grasp and manipulation remains a major challenge, because existing robotic grasp methods which heavily rely on depth maps are not suitable for transparent objects due to their unique visual properties. These properties lead to gaps and inaccuracies in the depth maps of the transparent objects captured by depth sensors. To address this issue, we propose an end-to-end network for transparent object depth completion that combines the strengths of single-view RGB-D based depth completion and multi-view depth estimation. Moreover, we introduce a depth refinement module based on confidence estimation to fuse predicted depth maps from single-view and multi-view modules, which further refines the restored depth map. The extensive experiments on the ClearPose and TransCG datasets demonstrate that our method achieves superior accuracy and robustness in complex scenarios with significant occlusion compared to the state-of-the-art methods.
Read more5/27/2024
0
ClearDepth: Enhanced Stereo Perception of Transparent Objects for Robotic Manipulation
Kaixin Bai, Huajian Zeng, Lei Zhang, Yiwen Liu, Hongli Xu, Zhaopeng Chen, Jianwei Zhang
Transparent object depth perception poses a challenge in everyday life and logistics, primarily due to the inability of standard 3D sensors to accurately capture depth on transparent or reflective surfaces. This limitation significantly affects depth map and point cloud-reliant applications, especially in robotic manipulation. We developed a vision transformer-based algorithm for stereo depth recovery of transparent objects. This approach is complemented by an innovative feature post-fusion module, which enhances the accuracy of depth recovery by structural features in images. To address the high costs associated with dataset collection for stereo camera-based perception of transparent objects, our method incorporates a parameter-aligned, domain-adaptive, and physically realistic Sim2Real simulation for efficient data generation, accelerated by AI algorithm. Our experimental results demonstrate the model's exceptional Sim2Real generalizability in real-world scenarios, enabling precise depth mapping of transparent objects to assist in robotic manipulation. Project details are available at https://sites.google.com/view/cleardepth/ .
Read more9/16/2024
0
Reconstructing Hand-Held Objects in 3D
Jane Wu, Georgios Pavlakos, Georgia Gkioxari, Jitendra Malik
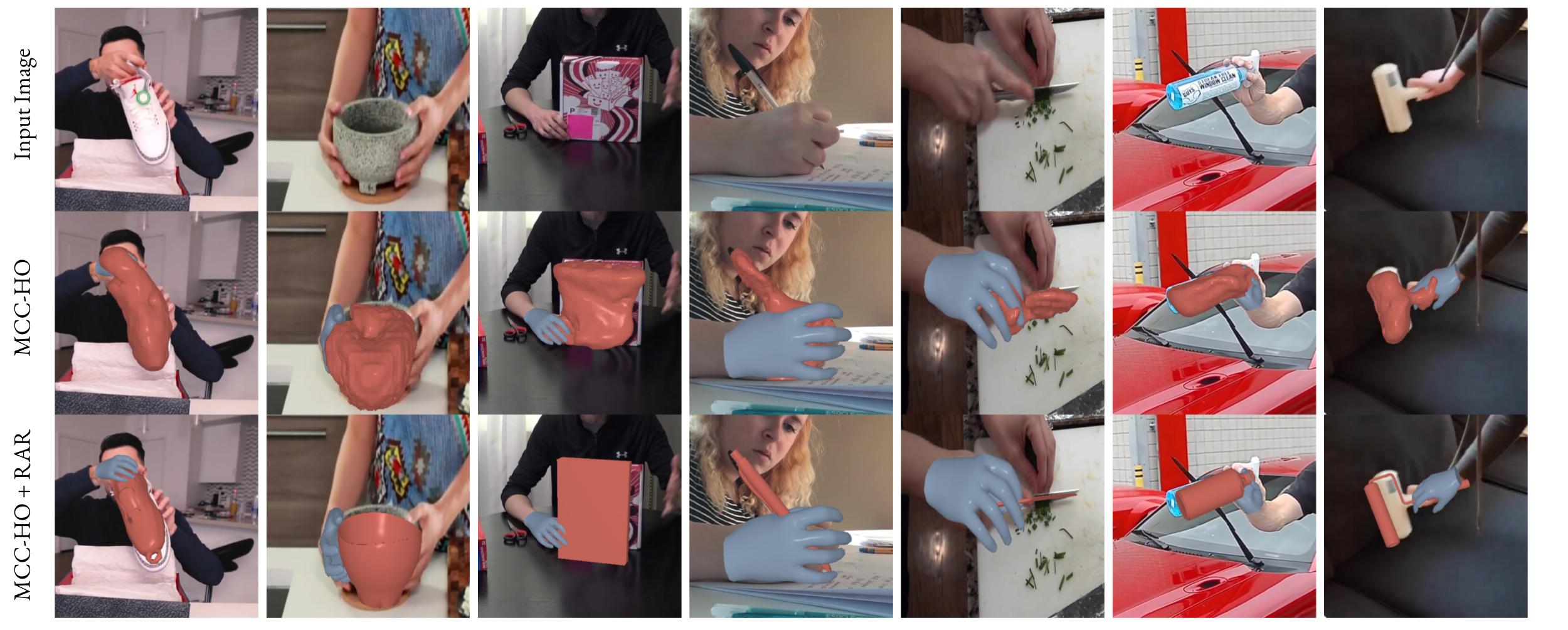
Objects manipulated by the hand (i.e., manipulanda) are particularly challenging to reconstruct from in-the-wild RGB images or videos. Not only does the hand occlude much of the object, but also the object is often only visible in a small number of image pixels. At the same time, two strong anchors emerge in this setting: (1) estimated 3D hands help disambiguate the location and scale of the object, and (2) the set of manipulanda is small relative to all possible objects. With these insights in mind, we present a scalable paradigm for handheld object reconstruction that builds on recent breakthroughs in large language/vision models and 3D object datasets. Our model, MCC-Hand-Object (MCC-HO), jointly reconstructs hand and object geometry given a single RGB image and inferred 3D hand as inputs. Subsequently, we use GPT-4(V) to retrieve a 3D object model that matches the object in the image and rigidly align the model to the network-inferred geometry; we call this alignment Retrieval-Augmented Reconstruction (RAR). Experiments demonstrate that MCC-HO achieves state-of-the-art performance on lab and Internet datasets, and we show how RAR can be used to automatically obtain 3D labels for in-the-wild images of hand-object interactions.
Read more4/11/2024