Closed-Loop Visuomotor Control with Generative Expectation for Robotic Manipulation

0

Sign in to get full access
Overview
- Presents a closed-loop visuomotor control system with generative expectation for robotic manipulation
- Aims to enable robots to manipulate objects in a more intelligent and adaptive way
- Proposes a novel architecture that combines visual perception, action planning, and generative expectation
Plain English Explanation
The research paper describes a new approach to help robots manipulate objects more effectively. Traditionally, robotic manipulation has relied on pre-programmed actions or simple feedback from sensors. This paper introduces a more advanced system that allows the robot to perceive the environment, plan actions, and anticipate the results of those actions.
The key idea is to equip the robot with a "generative expectation" model - a neural network that can predict what the robot will see after taking an action. This allows the robot to simulate the outcomes of potential actions and choose the best one. The robot can then execute the selected action and observe the result, using that feedback to update its understanding of the task and refine its future actions.
By closing the loop between perception, planning, and expectation, this system enables robots to adapt to new situations and manipulate objects in more intelligent and flexible ways. The researchers demonstrate the effectiveness of their approach through experiments on a robotic grasping task.
Technical Explanation
The paper introduces a closed-loop visuomotor control system that combines visual perception, action planning, and generative expectation. The core components are:
- Visual Perception: The robot uses a convolutional neural network to extract visual features from its camera inputs.
- Action Planning: A secondary network maps the visual features to candidate actions, which are then evaluated.
- Generative Expectation: A third network, trained on paired images of pre- and post-action states, can predict the expected visual outcome of potential actions.
The system operates in a closed loop:
- The robot observes the current scene and generates a set of candidate actions.
- The expectation network simulates the outcomes of those actions, and the best one is selected.
- The chosen action is executed, and the robot observes the actual result.
- The observed outcome is compared to the expectation, and the model parameters are updated accordingly.
Through this iterative process, the robot can adapt its behavior to manipulate objects in novel situations. The authors demonstrate the effectiveness of their approach on a robotic grasping task, showing improved performance compared to baseline methods.
Critical Analysis
The paper presents a promising approach to enhancing robotic manipulation capabilities, but there are a few potential limitations and areas for further research:
- The experiments are limited to a single grasping task, and it's unclear how well the system would generalize to more complex manipulation skills or a wider variety of objects.
- The generative expectation model is a key component, but the paper does not provide a detailed analysis of its accuracy or robustness.
- The closed-loop nature of the system relies on the robot's ability to observe the effects of its actions, which may be challenging in certain real-world scenarios with occlusions or other visual obstructions.
To address these limitations, future research could explore:
- Evaluating the system on a broader range of manipulation tasks
- Investigating more advanced expectation models, such as those that can handle partial observability
- Incorporating additional sensory modalities beyond vision, such as tactile feedback, to improve the robot's understanding of its actions
Overall, the paper presents an interesting and innovative approach to enhancing robotic manipulation, with promising results that warrant further exploration and refinement.
Conclusion
This research paper introduces a closed-loop visuomotor control system with generative expectation for robotic manipulation. By combining visual perception, action planning, and the ability to predict the outcomes of potential actions, the system enables robots to adapt and manipulate objects in more intelligent and flexible ways.
The key contribution is the generative expectation model, which allows the robot to simulate the effects of its actions before executing them. This, in turn, improves the robot's ability to select the most appropriate action for a given situation and learn from the observed outcomes.
The researchers demonstrate the effectiveness of their approach through experiments on a robotic grasping task, showing performance improvements over baseline methods. While the current system is limited to a single task, the general principles could be applied to a wider range of manipulation skills, potentially leading to more capable and adaptable robots in the future.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Closed-Loop Visuomotor Control with Generative Expectation for Robotic Manipulation
Qingwen Bu, Jia Zeng, Li Chen, Yanchao Yang, Guyue Zhou, Junchi Yan, Ping Luo, Heming Cui, Yi Ma, Hongyang Li
Despite significant progress in robotics and embodied AI in recent years, deploying robots for long-horizon tasks remains a great challenge. Majority of prior arts adhere to an open-loop philosophy and lack real-time feedback, leading to error accumulation and undesirable robustness. A handful of approaches have endeavored to establish feedback mechanisms leveraging pixel-level differences or pre-trained visual representations, yet their efficacy and adaptability have been found to be constrained. Inspired by classic closed-loop control systems, we propose CLOVER, a closed-loop visuomotor control framework that incorporates feedback mechanisms to improve adaptive robotic control. CLOVER consists of a text-conditioned video diffusion model for generating visual plans as reference inputs, a measurable embedding space for accurate error quantification, and a feedback-driven controller that refines actions from feedback and initiates replans as needed. Our framework exhibits notable advancement in real-world robotic tasks and achieves state-of-the-art on CALVIN benchmark, improving by 8% over previous open-loop counterparts. Code and checkpoints are maintained at https://github.com/OpenDriveLab/CLOVER.
Read more9/16/2024
0
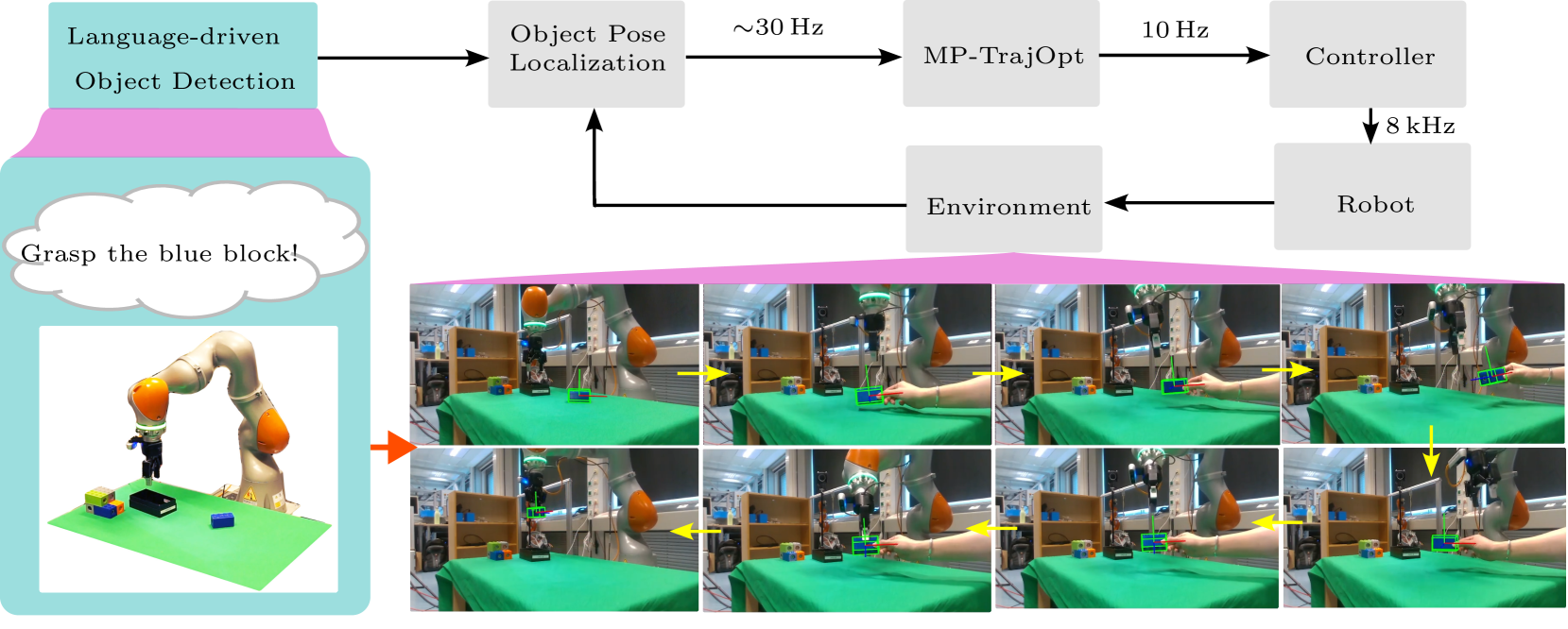
Language-Driven Closed-Loop Grasping with Model-Predictive Trajectory Replanning
Huy Hoang Nguyen, Minh Nhat Vu, Florian Beck, Gerald Ebmer, Anh Nguyen, Andreas Kugi
Combining a vision module inside a closed-loop control system for a emph{seamless movement} of a robot in a manipulation task is challenging due to the inconsistent update rates between utilized modules. This task is even more difficult in a dynamic environment, e.g., objects are moving. This paper presents a emph{modular} zero-shot framework for language-driven manipulation of (dynamic) objects through a closed-loop control system with real-time trajectory replanning and an online 6D object pose localization. We segment an object within $SI{0.5}{second}$ by leveraging a vision language model via language commands. Then, guided by natural language commands, a closed-loop system, including a unified pose estimation and tracking and online trajectory planning, is utilized to continuously track this object and compute the optimal trajectory in real-time. Our proposed zero-shot framework provides a smooth trajectory that avoids jerky movements and ensures the robot can grasp a non-stationary object. Experiment results exhibit the real-time capability of the proposed zero-shot modular framework for the trajectory optimization module to accurately and efficiently grasp moving objects, i.e., up to SI{30}{hertz} update rates for the online 6D pose localization module and SI{10}{hertz} update rates for the receding-horizon trajectory optimization. These advantages highlight the modular framework's potential applications in robotics and human-robot interaction; see the video in https://www.acin.tuwien.ac.at/en/6e64/.
Read more6/21/2024
🖼️
0
Closed Loop Interactive Embodied Reasoning for Robot Manipulation
Michal Nazarczuk, Jan Kristof Behrens, Karla Stepanova, Matej Hoffmann, Krystian Mikolajczyk
Embodied reasoning systems integrate robotic hardware and cognitive processes to perform complex tasks typically in response to a natural language query about a specific physical environment. This usually involves changing the belief about the scene or physically interacting and changing the scene (e.g. 'Sort the objects from lightest to heaviest'). In order to facilitate the development of such systems we introduce a new simulating environment that makes use of MuJoCo physics engine and high-quality renderer Blender to provide realistic visual observations that are also accurate to the physical state of the scene. Together with the simulator we propose a new benchmark composed of 10 classes of multi-step reasoning scenarios that require simultaneous visual and physical measurements. Finally, we develop a new modular Closed Loop Interactive Reasoning (CLIER) approach that takes into account the measurements of non-visual object properties, changes in the scene caused by external disturbances as well as uncertain outcomes of robotic actions. We extensively evaluate our reasoning approach in simulation and in the real world manipulation tasks with a success rate above 76% and 64%, respectively.
Read more4/24/2024

0
Closed-Loop Open-Vocabulary Mobile Manipulation with GPT-4V
Peiyuan Zhi, Zhiyuan Zhang, Muzhi Han, Zeyu Zhang, Zhitian Li, Ziyuan Jiao, Baoxiong Jia, Siyuan Huang
Autonomous robot navigation and manipulation in open environments require reasoning and replanning with closed-loop feedback. We present COME-robot, the first closed-loop framework utilizing the GPT-4V vision-language foundation model for open-ended reasoning and adaptive planning in real-world scenarios. We meticulously construct a library of action primitives for robot exploration, navigation, and manipulation, serving as callable execution modules for GPT-4V in task planning. On top of these modules, GPT-4V serves as the brain that can accomplish multimodal reasoning, generate action policy with code, verify the task progress, and provide feedback for replanning. Such design enables COME-robot to (i) actively perceive the environments, (ii) perform situated reasoning, and (iii) recover from failures. Through comprehensive experiments involving 8 challenging real-world tabletop and manipulation tasks, COME-robot demonstrates a significant improvement in task success rate (~25%) compared to state-of-the-art baseline methods. We further conduct comprehensive analyses to elucidate how COME-robot's design facilitates failure recovery, free-form instruction following, and long-horizon task planning.
Read more4/17/2024