CNN Autoencoder Resizer: A Power-Efficient LoS/NLoS Detector in MIMO-enabled UAV Networks
2405.16697
0
0

Abstract
Optimizing the design, performance, and resource efficiency of wireless networks (WNs) necessitates the ability to discern Line of Sight (LoS) and Non-Line of Sight (NLoS) scenarios across diverse applications and environments. Unmanned Aerial Vehicles (UAVs) exhibit significant potential in this regard due to their rapid mobility, aerial capabilities, and payload characteristics. Particularly, UAVs can serve as vital non-terrestrial base stations (NTBS) in the event of terrestrial base station (TBS) failures or downtime. In this paper, we propose CNN autoencoder resizer (CAR) as a framework that improves the accuracy of LoS/NLoS detection without demanding extra power consumption. Our proposed method increases the mean accuracy of detecting LoS/NLoS signals from 66% to 86%, while maintaining consistent power consumption levels. In addition, the resolution provided by CAR shows that it can be employed as a preprocessing tool in other methods to enhance the quality of signals.
Create account to get full access
Overview
- Introduces a CNN autoencoder-based resizer for efficient line-of-sight (LoS) and non-line-of-sight (NLoS) detection in MIMO-enabled UAV networks
- Focuses on power-efficient LoS/NLoS detection to enable effective MIMO communication in UAV networks
- Proposes a CNN autoencoder architecture to perform real-time LoS/NLoS classification with low computational complexity
Plain English Explanation
The paper presents a new technique for detecting whether a wireless communication link between a UAV (drone) and a ground station is in line-of-sight (LoS) or non-line-of-sight (NLoS) conditions. This is an important problem because LoS and NLoS links have very different communication properties, and knowing the link condition can help optimize the use of multiple-input multiple-output (MIMO) technology to improve the reliability and speed of the wireless connection.
The key innovation is the use of a convolutional neural network (CNN) autoencoder to perform the LoS/NLoS classification in a very efficient and low-power way. The autoencoder first compresses the input data (e.g., channel measurements) into a compact representation, and then tries to reconstruct the original data from this compressed representation. The authors show that the compressed representation contains enough information to accurately classify the link condition as LoS or NLoS, while requiring much less computational power than traditional approaches.
This efficiency is important for UAV applications, where onboard computing resources are limited and power consumption needs to be minimized to extend flight time. By using this CNN autoencoder-based technique, the authors demonstrate significant improvements in classification accuracy and power consumption compared to other LoS/NLoS detection methods.
Technical Explanation
The paper proposes a CNN autoencoder-based resizer for efficient LoS/NLoS detection in MIMO-enabled UAV networks. The key components of the approach are:
-
CNN Autoencoder Architecture: The authors design a CNN-based autoencoder model that takes channel state information (CSI) as input and learns a compact representation of the data. The encoder portion compresses the input, while the decoder attempts to reconstruct the original input from the compressed representation.
-
LoS/NLoS Classification: The compressed representation learned by the autoencoder is used as the input to a subsequent classification layer, which determines whether the channel is in LoS or NLoS condition. This classification is performed with low computational complexity compared to other techniques.
-
Experimental Evaluation: The proposed approach is evaluated using both simulation and real-world experiments in a MIMO-enabled UAV network. The authors compare the performance of the CNN autoencoder-based resizer to other LoS/NLoS detection methods in terms of classification accuracy and power consumption.
The results show that the CNN autoencoder-based resizer can achieve high LoS/NLoS classification accuracy while consuming significantly less power than alternative approaches. This makes it a promising solution for real-time LoS/NLoS detection in resource-constrained UAV applications, where edge detection and attention-driven techniques may be less suitable.
Critical Analysis
The paper presents a novel and promising approach to LoS/NLoS detection in UAV networks, but there are a few potential limitations and areas for further research:
-
Dataset and Generalization: The authors evaluate their approach using a specific set of simulation and real-world experiments. It would be important to test the CNN autoencoder's performance on a more diverse dataset to ensure it can generalize well to different environments and UAV network configurations.
-
Real-time Performance: While the proposed approach is designed for low-power, real-time operation, the authors do not provide detailed benchmarks on the actual inference latency and computational requirements. Further analysis of the system's real-time capabilities would be helpful.
-
Practical Deployment Considerations: The paper focuses on the technical aspects of the LoS/NLoS detection, but does not address potential challenges in deploying such a system in real-world UAV networks, such as integration with existing communication protocols and hardware constraints.
-
Comparison to Other Techniques: While the authors compare their approach to other LoS/NLoS detection methods, a more comprehensive evaluation against a wider range of techniques, including channel estimation and attention-driven approaches, would help further contextualize the strengths and limitations of the CNN autoencoder-based resizer.
Overall, the paper presents an interesting and potentially impactful contribution to the field of efficient LoS/NLoS detection in UAV networks. However, further research and real-world validation would be necessary to fully assess the practical viability and broader applicability of the proposed solution.
Conclusion
The CNN Autoencoder Resizer paper introduces a novel approach for efficient LoS/NLoS detection in MIMO-enabled UAV networks. By leveraging a CNN autoencoder architecture, the authors have developed a power-efficient solution that can accurately classify the link condition while requiring significantly less computational resources than traditional techniques.
This innovation is particularly relevant for UAV applications, where onboard computing power and energy consumption are critical constraints. The demonstrated improvements in classification accuracy and power efficiency make the CNN autoencoder-based resizer a promising candidate for real-time LoS/NLoS detection in resource-constrained UAV networks, potentially enabling more reliable and higher-performance MIMO communication.
While the paper presents promising results, further research is needed to assess the approach's generalization capabilities, real-time performance, and practical deployment considerations. Nonetheless, the work represents an important contribution to the ongoing efforts to enhance wireless communication in UAV-enabled applications.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers

Robust Low-Cost Drone Detection and Classification in Low SNR Environments
Stefan Gluge, Matthias Nyfeler, Ahmad Aghaebrahimian, Nicola Ramagnano, Christof Schupbach
0
0
The proliferation of drones, or unmanned aerial vehicles (UAVs), has raised significant safety concerns due to their potential misuse in activities such as espionage, smuggling, and infrastructure disruption. This paper addresses the critical need for effective drone detection and classification systems that operate independently of UAV cooperation. We evaluate various convolutional neural networks (CNNs) for their ability to detect and classify drones using spectrogram data derived from consecutive Fourier transforms of signal components. The focus is on model robustness in low signal-to-noise ratio (SNR) environments, which is critical for real-world applications. A comprehensive dataset is provided to support future model development. In addition, we demonstrate a low-cost drone detection system using a standard computer, software-defined radio (SDR) and antenna, validated through real-world field testing. On our development dataset, all models consistently achieved an average balanced classification accuracy of >= 85% at SNR > -12dB. In the field test, these models achieved an average balance accuracy of > 80%, depending on transmitter distance and antenna direction. Our contributions include: a publicly available dataset for model development, a comparative analysis of CNN for drone detection under low SNR conditions, and the deployment and field evaluation of a practical, low-cost detection system.
6/28/2024
Leveraging edge detection and neural networks for better UAV localization
Theo Di Piazza, Enric Meinhardt-Llopis, Gabriele Facciolo, Benedicte Bascle, Corentin Abgrall, Jean-Clement Devaux
0
0
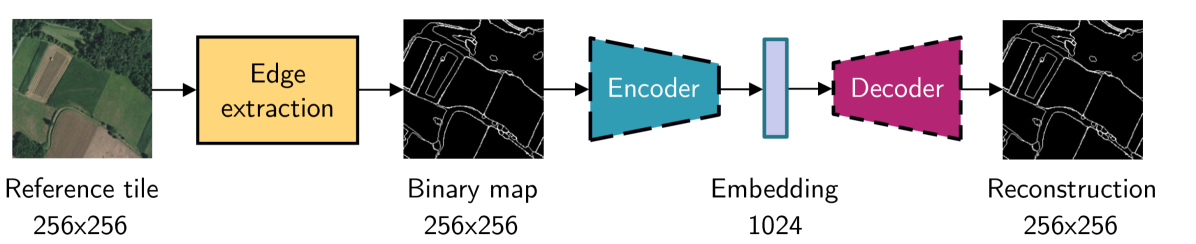
We propose a novel method for geolocalizing Unmanned Aerial Vehicles (UAVs) in environments lacking Global Navigation Satellite Systems (GNSS). Current state-of-the-art techniques employ an offline-trained encoder to generate a vector representation (embedding) of the UAV's current view, which is then compared with pre-computed embeddings of geo-referenced images to determine the UAV's position. Here, we demonstrate that the performance of these methods can be significantly enhanced by preprocessing the images to extract their edges, which exhibit robustness to seasonal and illumination variations. Furthermore, we establish that utilizing edges enhances resilience to orientation and altitude inaccuracies. Additionally, we introduce a confidence criterion for localization. Our findings are substantiated through synthetic experiments.
6/4/2024
PathFinder: Attention-Driven Dynamic Non-Line-of-Sight Tracking with a Mobile Robot
Shenbagaraj Kannapiran, Sreenithy Chandran, Suren Jayasuriya, Spring Berman
0
0
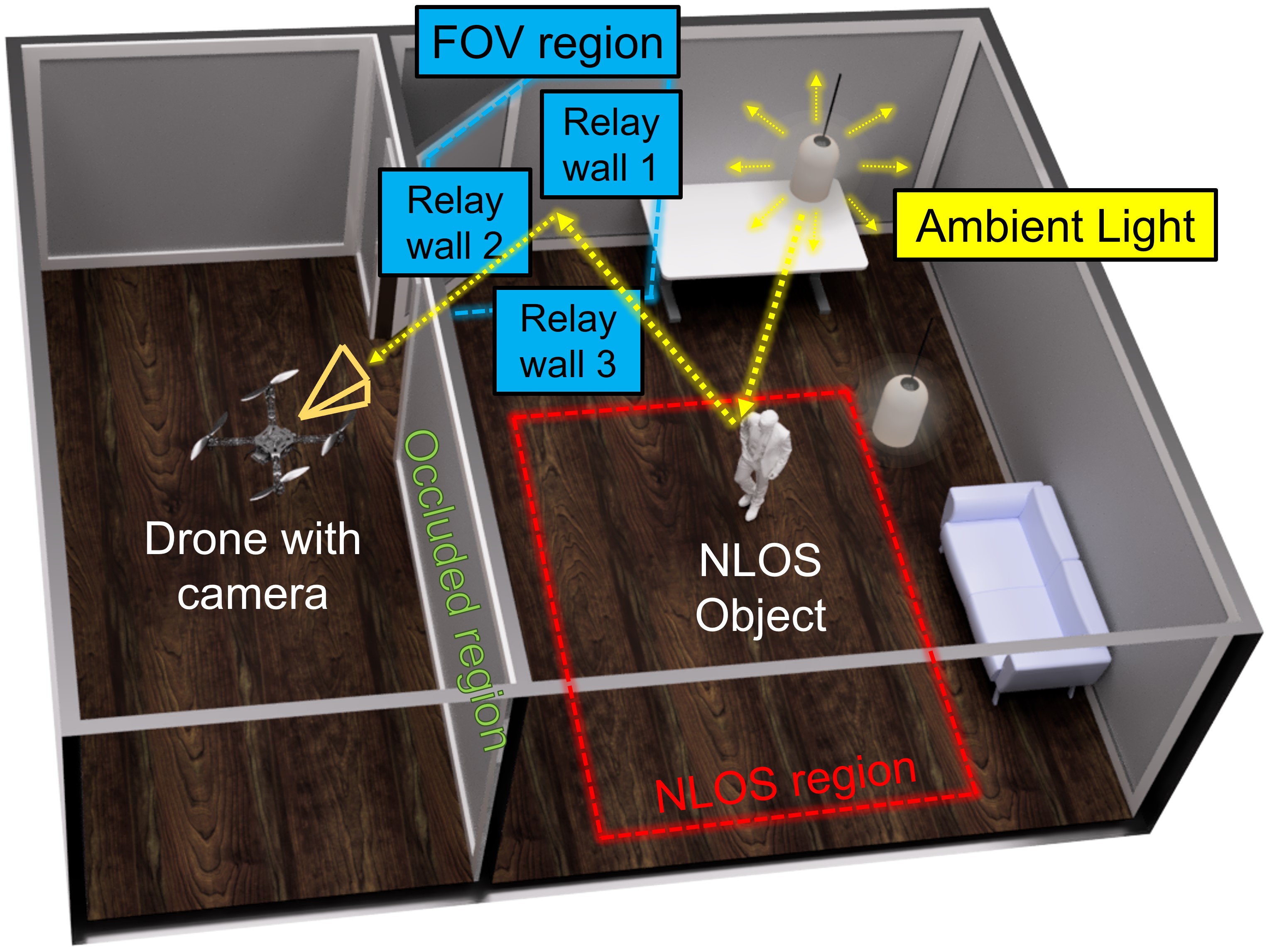
The study of non-line-of-sight (NLOS) imaging is growing due to its many potential applications, including rescue operations and pedestrian detection by self-driving cars. However, implementing NLOS imaging on a moving camera remains an open area of research. Existing NLOS imaging methods rely on time-resolved detectors and laser configurations that require precise optical alignment, making it difficult to deploy them in dynamic environments. This work proposes a data-driven approach to NLOS imaging, PathFinder, that can be used with a standard RGB camera mounted on a small, power-constrained mobile robot, such as an aerial drone. Our experimental pipeline is designed to accurately estimate the 2D trajectory of a person who moves in a Manhattan-world environment while remaining hidden from the camera's field-of-view. We introduce a novel approach to process a sequence of dynamic successive frames in a line-of-sight (LOS) video using an attention-based neural network that performs inference in real-time. The method also includes a preprocessing selection metric that analyzes images from a moving camera which contain multiple vertical planar surfaces, such as walls and building facades, and extracts planes that return maximum NLOS information. We validate the approach on in-the-wild scenes using a drone for video capture, thus demonstrating low-cost NLOS imaging in dynamic capture environments.
4/9/2024
LoS Sensing-based Channel Estimation in UAV-Assisted OFDM Systems
Chaojin Qing, Zhiying Liu, Wenquan Hu, Yinjie Zhang, Xi Cai, Pengfei Du
0
0
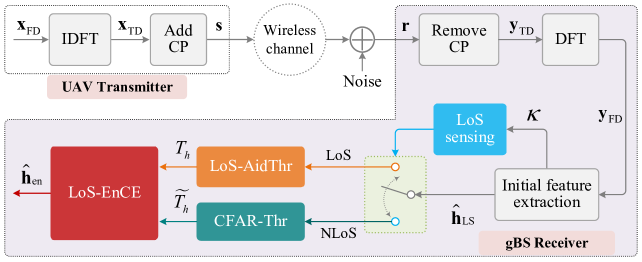
In unmanned aerial vehicle (UAV)-assisted orthogonal frequency division multiplexing (OFDM) systems, the potential advantage of the line-of-sight (LoS) path, characterized by its high probability of existence, has not been fully harnessed, thereby impeding the improvement of channel estimation (CE) accuracy. Inspired by the ideas of integrated sensing and communication (ISAC), this letter develops a LoS sensing method aimed at detecting the presence of LoS path. Leveraging the prior information obtained from LoS path detection, the detection thresholds for resolvable paths are proposed for LoS and Non-LoS (NLoS) scenarios, respectively. By employing these specifically designed detection thresholds, denoising processing is applied to classical least square (LS) CE, thereby improving the CE accuracy. Simulation results validate the effectiveness of the proposed method in enhancing CE accuracy and demonstrate its robustness against parameter variations.
4/4/2024