A Deep RL Approach on Task Placement and Scaling of Edge Resources for Cellular Vehicle-to-Network Service Provisioning

0
🤿
Sign in to get full access
Overview
- Cellular-Vehicle-to-Everything (C-V2X) is a technology that enables vehicles to communicate with each other and the surrounding infrastructure using cellular networks.
- This paper tackles the problem of efficiently provisioning C-V2X services by addressing the interdependent issues of service task placement and scaling of edge computing resources.
- The authors introduce a Deep Hybrid Policy Gradient (DHPG) approach, a Deep Reinforcement Learning (DRL) method for hybrid action spaces, to solve this complex optimization problem.
Plain English Explanation
C-V2X is a technology that allows vehicles to talk to each other and the surrounding traffic environment using cellular networks. This can help improve road safety, increase transportation efficiency, and reduce environmental impact. To effectively provide these C-V2X services, the paper looks at two key challenges: [1] where to place the service tasks, and [2] how to scale the edge computing resources to support them.
The authors show that solving these two problems together is a complex task. To address this, they developed a Deep Reinforcement Learning approach called Deep Hybrid Policy Gradient (DHPG). DHPG can handle the mixed (or "hybrid") decisions required, such as both discrete choices (e.g., where to place tasks) and continuous ones (e.g., how much computing power to allocate).
The researchers evaluated DHPG against other state-of-the-art solutions using real-world C-V2X traffic data. The results demonstrate that DHPG can keep C-V2X service latency low while efficiently using computing resources. Additionally, the authors show that DHPG is fast enough to support real-time C-V2X services.
Technical Explanation
The paper formulates the joint problem of service task placement and scaling of edge resources for Cellular Vehicular-to-Network (C-V2N) services. They prove that this problem is computationally intractable, meaning it is too complex to be solved efficiently using traditional optimization techniques.
To address this complexity, the authors introduce the Deep Hybrid Policy Gradient (DHPG) approach, a Deep Reinforcement Learning (DRL) method designed for hybrid action spaces. DHPG can handle the mixed discrete and continuous decisions required for the joint optimization problem.
The performance of DHPG is evaluated through simulations using a real-world C-V2N traffic dataset. The results show that DHPG outperforms several state-of-the-art solutions in maintaining C-V2N service latency below a preset threshold, while also optimizing the utilization of computing resources. Semantic-aware resource allocation and DRL-based RAT selection are some of the other approaches explored in the literature.
Finally, the authors conduct a time complexity analysis to verify that the proposed DHPG approach can support real-time C-V2N services.
Critical Analysis
The paper provides a comprehensive solution to the complex problem of provisioning C-V2X services by jointly optimizing service task placement and edge resource scaling. The use of a Deep Reinforcement Learning approach, specifically the DHPG method, is a novel and promising technique for handling the hybrid decision-making required.
However, the paper does not address potential limitations or caveats of the proposed approach. For example, the performance of DHPG may be sensitive to the quality and representative nature of the training data used. Additionally, the scalability of the solution as the number of vehicles and services increases could be an area for further investigation.
It would also be valuable to understand the computational overhead and resource requirements of the DHPG algorithm, as this could impact its real-world deployment and integration with existing C-V2X infrastructure.
Overall, the research presented in this paper is a significant contribution to the field of connected and autonomous vehicles, demonstrating the potential of advanced optimization techniques like Deep Reinforcement Learning to address the complex challenges in this domain.
Conclusion
This paper tackles the critical problem of effectively provisioning Cellular-Vehicle-to-Everything (C-V2X) services by jointly optimizing service task placement and edge resource scaling. The authors introduce a novel Deep Reinforcement Learning approach called Deep Hybrid Policy Gradient (DHPG) to handle the mixed discrete and continuous decisions required for this complex optimization problem.
The evaluation of DHPG using real-world C-V2X traffic data shows that it outperforms state-of-the-art solutions in maintaining low service latency while efficiently utilizing computing resources. Importantly, the authors demonstrate that DHPG can support the real-time requirements of C-V2X services.
The research presented in this paper represents a significant step forward in enabling the widespread adoption of connected and autonomous vehicle technologies, with the potential to improve road safety, transportation efficiency, and environmental sustainability. As the field of C-V2X continues to evolve, further research building on this work could lead to even more advanced and effective solutions.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
🤿
0
A Deep RL Approach on Task Placement and Scaling of Edge Resources for Cellular Vehicle-to-Network Service Provisioning
Cyril Shih-Huan Hsu, Jorge Mart'in-P'erez, Danny De Vleeschauwer, Koteswararao Kondepu, Luca Valcarenghi, Xi Li, Chrysa Papagianni
Cellular-Vehicle-to-Everything (C-V2X) is currently at the forefront of the digital transformation of our society. By enabling vehicles to communicate with each other and with the traffic environment using cellular networks, we redefine transportation, improving road safety and transportation services, increasing efficiency of vehicular traffic flows, and reducing environmental impact. To effectively facilitate the provisioning of Cellular Vehicular-to-Network (C-V2N) services, we tackle the interdependent problems of service task placement and scaling of edge resources. Specifically, we formulate the joint problem and prove that it is not computationally tractable. To address its complexity we introduce a Deep Hybrid Policy Gradient (DHPG), a Deep Reinforcement Learning (DRL) approach for hybrid action spaces.The performance of DHPG is evaluated against several state-of-the-art (SoA) solutions through simulations employing a real-world C-V2N traffic dataset. The results demonstrate that DHPG outperforms SoA solutions in maintaining C-V2N service latency below the preset delay threshold, while simultaneously optimizing the utilization of computing resources. Finally, time complexity analysis is conducted to verify that the proposed approach can support real-time C-V2N services.
Read more7/10/2024

0
Graph Neural Networks and Deep Reinforcement Learning Based Resource Allocation for V2X Communications
Maoxin Ji, Qiong Wu, Pingyi Fan, Nan Cheng, Wen Chen, Jiangzhou Wang, Khaled B. Letaief
In the rapidly evolving landscape of Internet of Vehicles (IoV) technology, Cellular Vehicle-to-Everything (C-V2X) communication has attracted much attention due to its superior performance in coverage, latency, and throughput. Resource allocation within C-V2X is crucial for ensuring the transmission of safety information and meeting the stringent requirements for ultra-low latency and high reliability in Vehicle-to-Vehicle (V2V) communication. This paper proposes a method that integrates Graph Neural Networks (GNN) with Deep Reinforcement Learning (DRL) to address this challenge. By constructing a dynamic graph with communication links as nodes and employing the Graph Sample and Aggregation (GraphSAGE) model to adapt to changes in graph structure, the model aims to ensure a high success rate for V2V communication while minimizing interference on Vehicle-to-Infrastructure (V2I) links, thereby ensuring the successful transmission of V2V link information and maintaining high transmission rates for V2I links. The proposed method retains the global feature learning capabilities of GNN and supports distributed network deployment, allowing vehicles to extract low-dimensional features that include structural information from the graph network based on local observations and to make independent resource allocation decisions. Simulation results indicate that the introduction of GNN, with a modest increase in computational load, effectively enhances the decision-making quality of agents, demonstrating superiority to other methods. This study not only provides a theoretically efficient resource allocation strategy for V2V and V2I communications but also paves a new technical path for resource management in practical IoV environments.
Read more7/10/2024

0
Hierarchical Reinforcement Learning Empowered Task Offloading in V2I Networks
Xinyu You, Haojie Yan, Yuedong Xu, Lifeng Wang, Liangui Dai
Edge computing plays an essential role in the vehicle-to-infrastructure (V2I) networks, where vehicles offload their intensive computation tasks to the road-side units for saving energy and reduce the latency. This paper designs the optimal task offloading policy to address the concerns involving processing delay, energy consumption and edge computing cost. Each computation task consisting of some interdependent sub-tasks is characterized as a directed acyclic graph (DAG). In such dynamic networks, a novel hierarchical Offloading scheme is proposed by leveraging deep reinforcement learning (DRL). The inter-dependencies among the DAGs of the computation tasks are extracted using a graph neural network with attention mechanism. A parameterized DRL algorithm is developed to deal with the hierarchical action space containing both discrete and continuous actions. Simulation results with a real-world car speed dataset demonstrate that the proposed scheme can effectively reduce the system overhead.
Read more5/21/2024
0
Communication-Aware Consistent Edge Selection for Mobile Users and Autonomous Vehicles
Nazish Tahir, Ramviyas Parasuraman, Haijian Sun
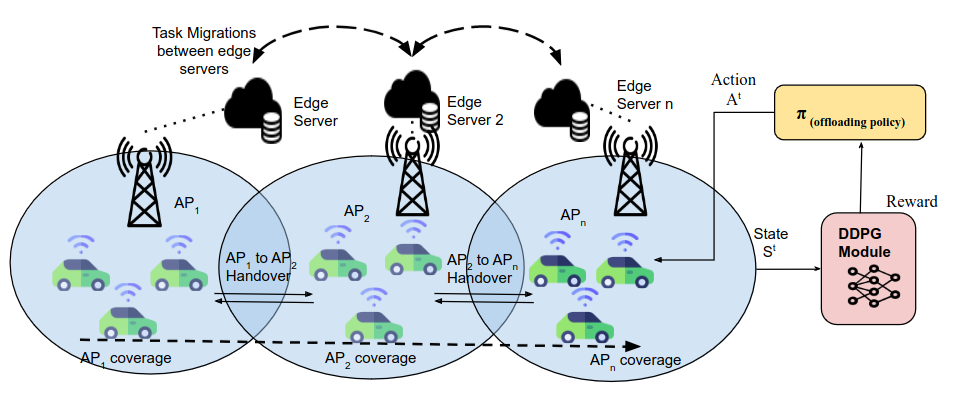
Offloading time-sensitive, computationally intensive tasks-such as advanced learning algorithms for autonomous driving-from vehicles to nearby edge servers, vehicle-to-infrastructure (V2I) systems, or other collaborating vehicles via vehicle-to-vehicle (V2V) communication enhances service efficiency. However, whence traversing the path to the destination, the vehicle's mobility necessitates frequent handovers among the access points (APs) to maintain continuous and uninterrupted wireless connections to maintain the network's Quality of Service (QoS). These frequent handovers subsequently lead to task migrations among the edge servers associated with the respective APs. This paper addresses the joint problem of task migration and access-point handover by proposing a deep reinforcement learning framework based on the Deep Deterministic Policy Gradient (DDPG) algorithm. A joint allocation method of communication and computation of APs is proposed to minimize computational load, service latency, and interruptions with the overarching goal of maximizing QoS. We implement and evaluate our proposed framework on simulated experiments to achieve smooth and seamless task switching among edge servers, ultimately reducing latency.
Read more8/9/2024