DRL-Based RAT Selection in a Hybrid Vehicular Communication Network

0
🌐
Sign in to get full access
Overview
- Cooperative intelligent transport systems rely on Vehicle-to-Everything (V2X) applications to improve road safety
- Emerging V2X applications like Advanced Driver Assistance Systems (ADASs) and Connected Autonomous Driving (CAD) require high reliability, low latency, and high throughput
- Current V2X communication technologies like ITS-G5 and C-V2X cannot fully meet these requirements
- This paper proposes an intelligent, scalable hybrid vehicular communication architecture that leverages multiple Radio Access Technologies (RATs) to satisfy the needs of these applications
- It also introduces a Deep Reinforcement Learning (DRL)-based communication mode selection algorithm to maximize reliability while managing resource consumption
Plain English Explanation
Vehicles today are becoming increasingly connected and intelligent, with the help of technologies like Vehicle-to-Everything (V2X) communications. These allow vehicles to exchange information with other vehicles, infrastructure, and even pedestrians. This is important for improving road safety and enabling new features like Advanced Driver Assistance Systems (ADASs) and Connected Autonomous Driving (CAD).
However, the current wireless technologies used for V2X, like ITS-G5 and Cellular V2X (C-V2X), have limitations in terms of the reliability, low latency, and high data throughput required by these new applications. To address this, the researchers propose a hybrid vehicular communication architecture that combines multiple wireless technologies to take advantage of their unique strengths.
They also develop a communication mode selection algorithm based on Deep Reinforcement Learning (DRL). This allows the system to dynamically choose the best wireless technology to use in a given situation, in order to maximize the reliability of the connections while minimizing the use of network resources.
The researchers test their approach using the example of a vehicle platooning scenario, which requires very reliable communication. Their results show that the hybrid architecture can improve the packet reception rate by up to 30% compared to other strategies, while also using the network resources more efficiently.
Technical Explanation
The paper proposes an intelligent, scalable hybrid vehicular communication architecture that leverages multiple Radio Access Technologies (RATs) to meet the high reliability, low latency, and high throughput requirements of emerging V2X applications like ADASs and CAD.
The architecture dynamically selects the optimal communication mode (e.g., ITS-G5, C-V2X) based on the current conditions and application requirements. To enable this, the authors develop a Deep Reinforcement Learning (DRL)-based communication mode selection algorithm. This algorithm aims to maximize the network's reliability, as measured by the Packet Reception Rate (PRR), while limiting the consumption of network resources.
The researchers evaluate their approach using a platooning scenario, which requires highly reliable communication between vehicles. Their numerical results show that the hybrid architecture can improve the PRR by up to 30% compared to both a static RAT selection strategy and a multi-criteria decision-making (MCDM) algorithm. Additionally, it enhances the efficiency of the redundant communication mode by 20% in terms of resource consumption.
Critical Analysis
The paper presents a promising approach to addressing the limitations of existing V2X communication technologies. By leveraging a hybrid architecture and a DRL-based mode selection algorithm, the researchers demonstrate the potential to significantly improve the reliability and efficiency of V2X networks.
However, the paper could have provided more details on the specific trade-offs and limitations of the proposed approach. For example, it would be helpful to understand the computational complexity of the DRL algorithm and how it might scale as the number of vehicles and applications increases. Additionally, the paper could have discussed the potential challenges in deploying and integrating the hybrid architecture in real-world settings, such as the need for coordination between different wireless technologies and infrastructure providers.
Furthermore, while the platooning scenario provides a useful test case, it would be valuable to explore the performance of the proposed approach in a wider range of V2X use cases, such as intersection collision avoidance or dynamic traffic management. This could help identify any additional requirements or limitations that the architecture and algorithm need to address.
Overall, the research presented in this paper represents an important step towards enabling the reliable and efficient communication required for the next generation of cooperative intelligent transport systems. Further exploration and refinement of the proposed solutions could lead to significant advancements in this critical area of study.
Conclusion
This paper introduces an intelligent, scalable hybrid vehicular communication architecture that leverages multiple Radio Access Technologies (RATs) to meet the high reliability, low latency, and high throughput requirements of emerging V2X applications like ADASs and CAD. The authors also propose a Deep Reinforcement Learning (DRL)-based communication mode selection algorithm to maximize the network's reliability while managing resource consumption.
Evaluation of the approach using a platooning scenario demonstrates that the hybrid architecture can improve the Packet Reception Rate (PRR) by up to 30% compared to other strategies, while also enhancing the efficiency of the redundant communication mode by 20%. This research represents an important step towards enabling the reliable and efficient communication required for the next generation of cooperative intelligent transport systems.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
🌐
0
DRL-Based RAT Selection in a Hybrid Vehicular Communication Network
Badreddine Yacine Yacheur (LaBRI), Toufik Ahmed (LaBRI), Mohamed Mosbah (LaBRI)
Cooperative intelligent transport systems rely on a set of Vehicle-to-Everything (V2X) applications to enhance road safety. Emerging new V2X applications like Advanced Driver Assistance Systems (ADASs) and Connected Autonomous Driving (CAD) applications depend on a significant amount of shared data and require high reliability, low end-to-end (E2E) latency, and high throughput. However, present V2X communication technologies such as ITS-G5 and C-V2X (Cellular V2X) cannot satisfy these requirements alone. In this paper, we propose an intelligent, scalable hybrid vehicular communication architecture that leverages the performance of multiple Radio Access Technologies (RATs) to meet the needs of these applications. Then, we propose a communication mode selection algorithm based on Deep Reinforcement Learning (DRL) to maximize the network's reliability while limiting resource consumption. Finally, we assess our work using the platooning scenario that requires high reliability. Numerical results reveal that the hybrid vehicular communication architecture has the potential to enhance the packet reception rate (PRR) by up to 30% compared to both the static RAT selection strategy and the multi-criteria decision-making (MCDM) selection algorithm. Additionally, it improves the efficiency of the redundant communication mode by 20% regarding resource consumption
Read more7/2/2024
0
Communication-Aware Consistent Edge Selection for Mobile Users and Autonomous Vehicles
Nazish Tahir, Ramviyas Parasuraman, Haijian Sun
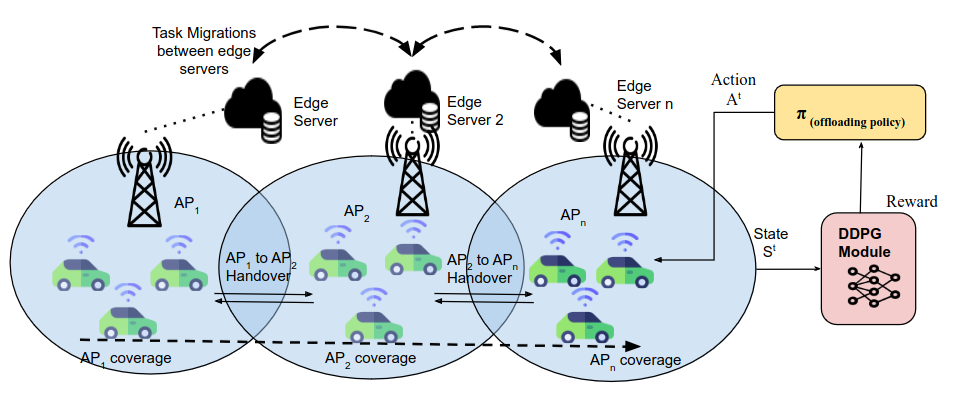
Offloading time-sensitive, computationally intensive tasks-such as advanced learning algorithms for autonomous driving-from vehicles to nearby edge servers, vehicle-to-infrastructure (V2I) systems, or other collaborating vehicles via vehicle-to-vehicle (V2V) communication enhances service efficiency. However, whence traversing the path to the destination, the vehicle's mobility necessitates frequent handovers among the access points (APs) to maintain continuous and uninterrupted wireless connections to maintain the network's Quality of Service (QoS). These frequent handovers subsequently lead to task migrations among the edge servers associated with the respective APs. This paper addresses the joint problem of task migration and access-point handover by proposing a deep reinforcement learning framework based on the Deep Deterministic Policy Gradient (DDPG) algorithm. A joint allocation method of communication and computation of APs is proposed to minimize computational load, service latency, and interruptions with the overarching goal of maximizing QoS. We implement and evaluate our proposed framework on simulated experiments to achieve smooth and seamless task switching among edge servers, ultimately reducing latency.
Read more8/9/2024
0
Joint Optimization of Age of Information and Energy Consumption in NR-V2X System based on Deep Reinforcement Learning
Shulin Song, Zheng Zhang, Qiong Wu, Qiang Fan, Pingyi Fan
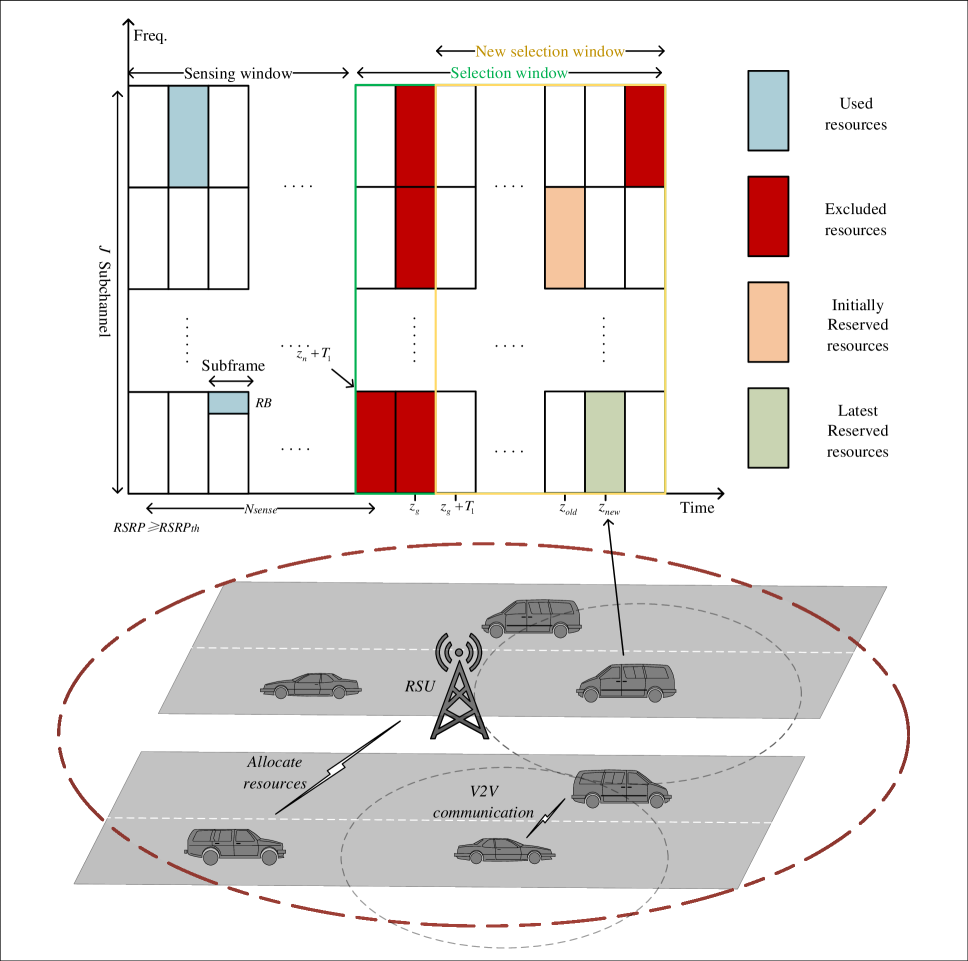
Autonomous driving may be the most important application scenario of next generation, the development of wireless access technologies enabling reliable and low-latency vehicle communication becomes crucial. To address this, 3GPP has developed Vehicle-to-Everything (V2X) specifications based on 5G New Radio (NR) technology, where Mode 2 Side-Link (SL) communication resembles Mode 4 in LTE-V2X, allowing direct communication between vehicles. This supplements SL communication in LTE-V2X and represents the latest advancement in cellular V2X (C-V2X) with improved performance of NR-V2X. However, in NR-V2X Mode 2, resource collisions still occur, and thus degrade the age of information (AOI). Therefore, a interference cancellation method is employed to mitigate this impact by combining NR-V2X with Non-Orthogonal multiple access (NOMA) technology. In NR-V2X, when vehicles select smaller resource reservation interval (RRI), higher-frequency transmissions take ore energy to reduce AoI. Hence, it is important to jointly consider AoI and communication energy consumption based on NR-V2X communication. Then, we formulate such an optimization problem and employ the Deep Reinforcement Learning (DRL) algorithm to compute the optimal transmission RRI and transmission power for each transmitting vehicle to reduce the energy consumption of each transmitting vehicle and the AoI of each receiving vehicle. Extensive simulations have demonstrated the performance of our proposed algorithm.
Read more7/12/2024

0
Event-Triggered Reinforcement Learning Based Joint Resource Allocation for Ultra-Reliable Low-Latency V2X Communications
Nasir Khan, Sinem Coleri
Future 6G-enabled vehicular networks face the challenge of ensuring ultra-reliable low-latency communication (URLLC) for delivering safety-critical information in a timely manner. Existing resource allocation schemes for vehicle-to-everything (V2X) communication systems primarily rely on traditional optimization-based algorithms. However, these methods often fail to guarantee the strict reliability and latency requirements of URLLC applications in dynamic vehicular environments due to the high complexity and communication overhead of the solution methodologies. This paper proposes a novel deep reinforcement learning (DRL) based framework for the joint power and block length allocation to minimize the worst-case decoding-error probability in the finite block length (FBL) regime for a URLLC-based downlink V2X communication system. The problem is formulated as a non-convex mixed-integer nonlinear programming problem (MINLP). Initially, an algorithm grounded in optimization theory is developed based on deriving the joint convexity of the decoding error probability in the block length and transmit power variables within the region of interest. Subsequently, an efficient event-triggered DRL-based algorithm is proposed to solve the joint optimization problem. Incorporating event-triggered learning into the DRL framework enables assessing whether to initiate the DRL process, thereby reducing the number of DRL process executions while maintaining reasonable reliability performance. Simulation results demonstrate that the proposed event-triggered DRL scheme can achieve 95% of the performance of the joint optimization scheme while reducing the DRL executions by up to 24% for different network settings.
Read more7/22/2024