Neuromorphic force-control in an industrial task: validating energy and latency benefits

0

Sign in to get full access
Overview
- Examines the energy and latency benefits of using a neuromorphic control system in an industrial task
- Compares the performance of a neuromorphic system to a traditional control system
- Validates the advantages of neuromorphic computing for industrial applications
Plain English Explanation
The paper investigates the use of a neuromorphic computing system to control an industrial task. Neuromorphic systems are designed to mimic the human brain, using specialized hardware and algorithms to perform computations more efficiently than traditional digital computers.
In this study, the researchers set up an experiment to compare the performance of a neuromorphic control system to a traditional control system for an industrial task. They looked at two key metrics: energy consumption and latency (response time). The goal was to validate the potential benefits of using neuromorphic computing for industrial applications, where energy efficiency and fast response times are often critical.
The results showed that the neuromorphic system had significant advantages over the traditional system in terms of both energy usage and latency. This suggests that neuromorphic computing could be a valuable technology for industrial automation, robotics, and other applications where efficient, low-latency control is important.
Technical Explanation
Experiment Design
The researchers set up an experiment to evaluate the performance of a neuromorphic control system in an industrial task. They compared the neuromorphic system to a traditional control system in terms of energy consumption and latency.
The experiment involved a robotic arm performing a force-control task, where the arm had to apply a specific amount of force to an object. Both the neuromorphic and traditional control systems were used to control the arm's movement and force application.
Architecture
The neuromorphic control system was based on a spiking neural network architecture, which is designed to mimic the way the human brain processes information. This system used specialized neuromorphic hardware to perform the computations more efficiently than a traditional digital computer.
In contrast, the traditional control system was implemented using a standard digital control algorithm running on a general-purpose computer.
Insights
The results showed that the neuromorphic control system had significantly lower energy consumption and lower latency compared to the traditional control system. This suggests that neuromorphic computing could be a powerful approach for industrial applications where energy efficiency and fast response times are critical.
The researchers attribute the advantages of the neuromorphic system to its ability to perform computations more efficiently, using less energy and with lower latency, due to its specialized hardware and brain-inspired architecture.
Critical Analysis
The paper provides a comprehensive evaluation of the potential benefits of using neuromorphic computing for industrial control tasks. However, the researchers acknowledge that the study was conducted in a controlled laboratory setting and that further testing would be needed to validate the performance of the neuromorphic system in real-world industrial environments.
Additionally, the paper does not address the potential challenges and limitations of implementing neuromorphic systems in industrial settings, such as the availability of neuromorphic hardware, the complexity of integrating these systems into existing industrial infrastructure, and the need for specialized training and expertise.
Conclusion
This paper presents a promising case for the use of neuromorphic computing in industrial applications. The experimental results demonstrate the potential energy and latency benefits of a neuromorphic control system compared to a traditional approach. These findings suggest that neuromorphic computing could be a valuable technology for improving the efficiency and responsiveness of industrial automation and robotics systems.
Further research and development in this area could lead to the widespread adoption of neuromorphic solutions in a wide range of industrial settings, potentially contributing to more sustainable and responsive industrial processes.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Neuromorphic force-control in an industrial task: validating energy and latency benefits
Camilo Amaya, Evan Eames, Gintautas Palinauskas, Alexander Perzylo, Yulia Sandamirskaya, Axel von Arnim
As robots become smarter and more ubiquitous, optimizing the power consumption of intelligent compute becomes imperative towards ensuring the sustainability of technological advancements. Neuromorphic computing hardware makes use of biologically inspired neural architectures to achieve energy and latency improvements compared to conventional von Neumann computing architecture. Applying these benefits to robots has been demonstrated in several works in the field of neurorobotics, typically on relatively simple control tasks. Here, we introduce an example of neuromorphic computing applied to the real-world industrial task of object insertion. We trained a spiking neural network (SNN) to perform force-torque feedback control using a reinforcement learning approach in simulation. We then ported the SNN to the Intel neuromorphic research chip Loihi interfaced with a KUKA robotic arm. At inference time we show latency competitive with current CPU/GPU architectures, and one order of magnitude less energy usage in comparison to state-of-the-art low-energy edge-hardware. We offer this example as a proof of concept implementation of a neuromoprhic controller in real-world robotic setting, highlighting the benefits of neuromorphic hardware for the development of intelligent controllers for robots.
Read more9/4/2024

0
New!Detection of Fast-Moving Objects with Neuromorphic Hardware
Andreas Ziegler, Karl Vetter, Thomas Gossard, Jonas Tebbe, Sebastian Otte, Andreas Zell
Neuromorphic Computing (NC) and Spiking Neural Networks (SNNs) in particular are often viewed as the next generation of Neural Networks (NNs). NC is a novel bio-inspired paradigm for energy efficient neural computation, often relying on SNNs in which neurons communicate via spikes in a sparse, event-based manner. This communication via spikes can be exploited by neuromorphic hardware implementations very effectively and results in a drastic reductions of power consumption and latency in contrast to regular GPU-based NNs. In recent years, neuromorphic hardware has become more accessible, and the support of learning frameworks has improved. However, available hardware is partially still experimental, and it is not transparent what these solutions are effectively capable of, how they integrate into real-world robotics applications, and how they realistically benefit energy efficiency and latency. In this work, we provide the robotics research community with an overview of what is possible with SNNs on neuromorphic hardware focusing on real-time processing. We introduce a benchmark of three popular neuromorphic hardware devices for the task of event-based object detection. Moreover, we show that an SNN on a neuromorphic hardware is able to run in a challenging table tennis robot setup in real-time.
Read more9/18/2024
0
A compact neuromorphic system for ultra energy-efficient, on-device robot localization
Adam D. Hines, Michael Milford, Tobias Fischer
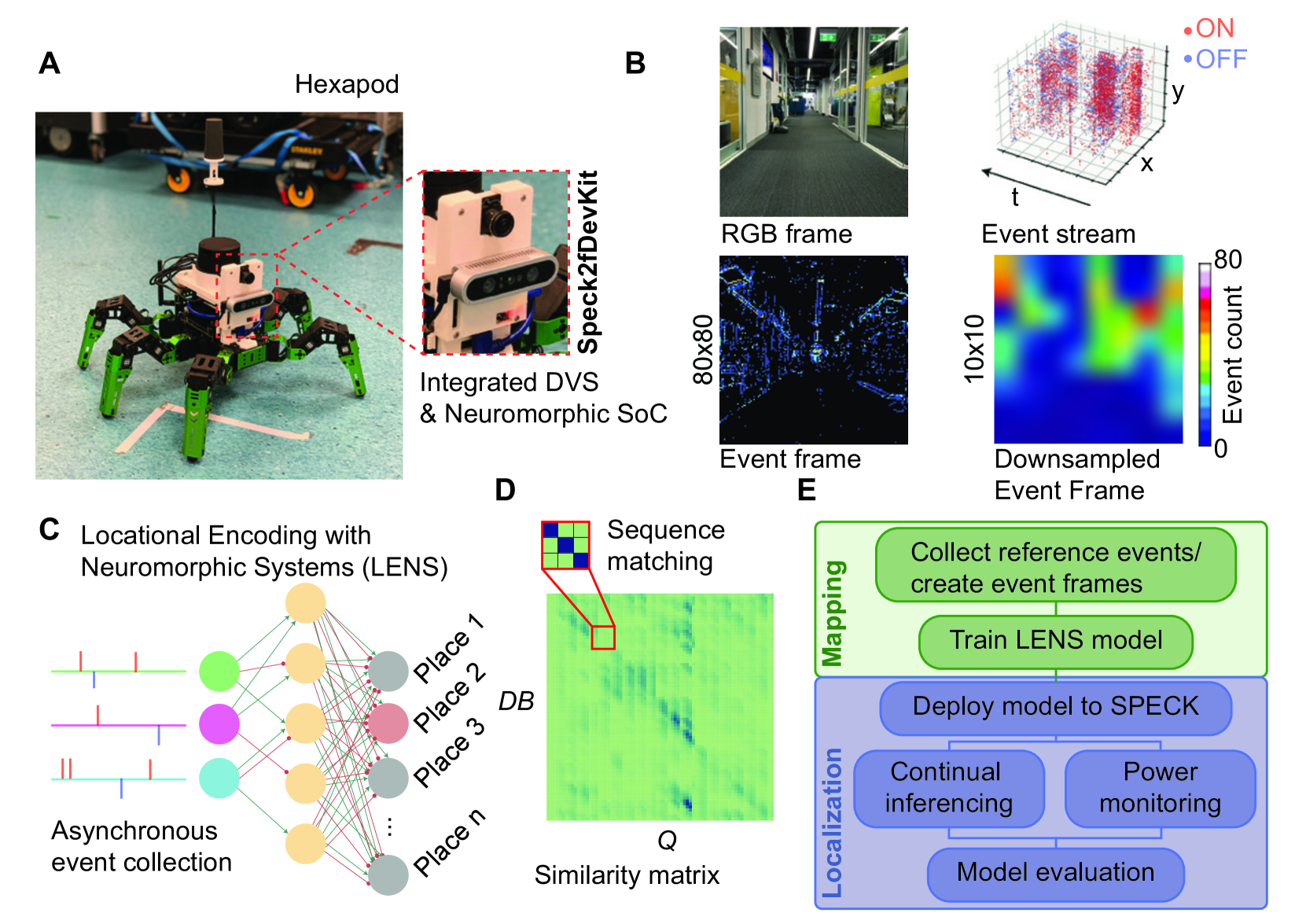
Neuromorphic computing offers a transformative pathway to overcome the computational and energy challenges faced in deploying robotic localization and navigation systems at the edge. Visual place recognition, a critical component for navigation, is often hampered by the high resource demands of conventional systems, making them unsuitable for small-scale robotic platforms which still require to perform complex, long-range tasks. Although neuromorphic approaches offer potential for greater efficiency, real-time edge deployment remains constrained by the complexity and limited scalability of bio-realistic networks. Here, we demonstrate a neuromorphic localization system that performs accurate place recognition in up to 8km of traversal using models as small as 180 KB with 44k parameters, while consuming less than 1% of the energy required by conventional methods. Our Locational Encoding with Neuromorphic Systems (LENS) integrates spiking neural networks, an event-based dynamic vision sensor, and a neuromorphic processor within a single SPECK(TM) chip, enabling real-time, energy-efficient localization on a hexapod robot. LENS represents the first fully neuromorphic localization system capable of large-scale, on-device deployment, setting a new benchmark for energy efficient robotic place recognition.
Read more8/30/2024
0
Neuromorphic quadratic programming for efficient and scalable model predictive control
Ashish Rao Mangalore, Gabriel Andres Fonseca Guerra, Sumedh R. Risbud, Philipp Stratmann, Andreas Wild
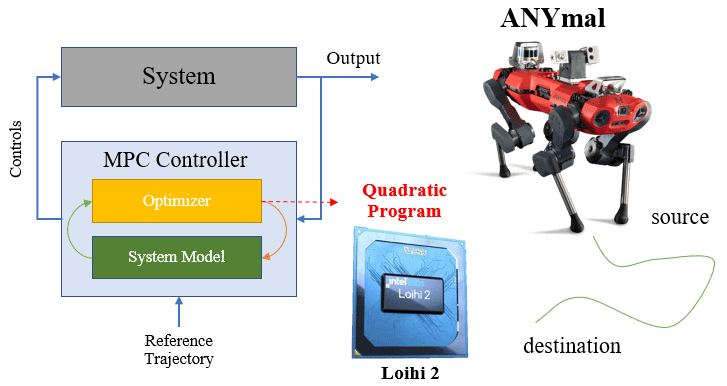
Applications in robotics or other size-, weight- and power-constrained autonomous systems at the edge often require real-time and low-energy solutions to large optimization problems. Event-based and memory-integrated neuromorphic architectures promise to solve such optimization problems with superior energy efficiency and performance compared to conventional von Neumann architectures. Here, we present a method to solve convex continuous optimization problems with quadratic cost functions and linear constraints on Intel's scalable neuromorphic research chip Loihi 2. When applied to model predictive control (MPC) problems for the quadruped robotic platform ANYmal, this method achieves over two orders of magnitude reduction in combined energy-delay product compared to the state-of-the-art solver, OSQP, on (edge) CPUs and GPUs with solution times under ten milliseconds for various problem sizes. These results demonstrate the benefit of non-von-Neumann architectures for robotic control applications.
Read more6/21/2024