CompdVision: Combining Near-Field 3D Visual and Tactile Sensing Using a Compact Compound-Eye Imaging System

0
Sign in to get full access
Overview
• This paper presents a compact compound-eye imaging system that combines near-field 3D visual and tactile sensing capabilities. The system uses an array of microlenses and photodetectors to capture both visual and tactile information about objects in close proximity.
• The key innovation is the ability to extract 3D shape information and tactile feedback from a single compact sensor, which could enable new applications in robotics, augmented reality, and other areas that require detailed sensing of nearby objects.
Plain English Explanation
The researchers have developed a unique camera-like device that can do two things at once - see 3D shapes of objects up close and also feel their textures. Typically, robots or AR systems would need separate visual and tactile sensors to gather this kind of detailed information about nearby objects. But this new device packs both capabilities into a small, single unit.
The way it works is by using an array of tiny lenses and light detectors, kind of like a bug's compound eye. This allows it to capture 3D shape data as well as information about the surface properties and texture of objects it's looking at. The researchers note this could enable new robot capabilities for handling delicate objects, as well as enhanced augmented reality experiences that blend visual and tactile feedback.
Technical Explanation
The core of the system is a compound-eye imaging array that uses a 10x10 grid of microlenses and photodetectors. As the array captures light from an object, the researchers can extract 3D shape information by analyzing the disparity between the images seen through different microlenses.
At the same time, the system measures subtle changes in the light detected by each photodetector, which correspond to tactile information about the object's surface texture and deformation. By combining this visual and tactile data, the system can provide a detailed model of the object's 3D geometry and material properties.
The researchers tested the system by having it examine a variety of everyday objects, from soft fabrics to rigid shapes. They found the system could accurately reconstruct 3D shape and detect tactile features like edges and surface roughness. This multimodal sensing capability could enhance robot grasping and manipulation, as well as enable new augmented reality applications that blend visual and haptic feedback.
Critical Analysis
The researchers acknowledge several limitations of their current system, such as its restricted field of view and sensitivity to ambient lighting. They also note that the tactile sensing performance could be improved by further optimizing the photodetector design and signal processing.
Additionally, the system's reliance on a relatively complex optical setup may limit its practicality for some real-world applications that require a more compact and cost-effective solution. Exploring alternative approaches, such as the use of hydrogel-based tactile sensors, may help address these concerns.
Overall, while the presented system demonstrates an innovative integration of visual and tactile sensing, further research and development will be needed to fully realize its potential for practical applications in robotics, augmented reality, and beyond.
Conclusion
This research introduces a unique compound-eye imaging system that can simultaneously capture 3D visual and tactile information about nearby objects. By combining these complementary sensing modalities into a single compact device, the system could enable new capabilities for robots, augmented reality, and other applications that require detailed, multimodal perception of the physical world. While the current prototype has some limitations, the general approach holds promise for enhancing our ability to interact with and understand the world around us.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
CompdVision: Combining Near-Field 3D Visual and Tactile Sensing Using a Compact Compound-Eye Imaging System
Lifan Luo, Boyang Zhang, Zhijie Peng, Yik Kin Cheung, Guanlan Zhang, Zhigang Li, Michael Yu Wang, Hongyu Yu
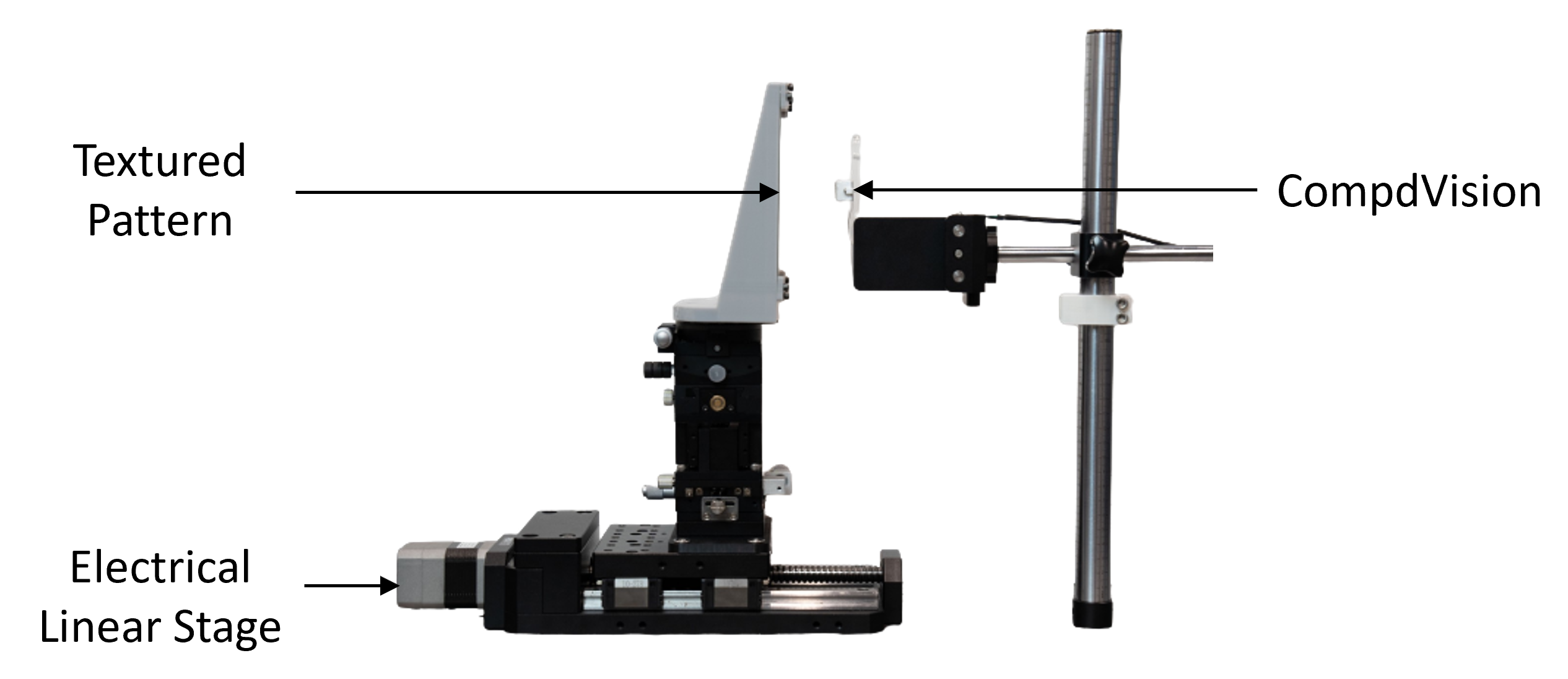
As automation technologies advance, the need for compact and multi-modal sensors in robotic applications is growing. To address this demand, we introduce CompdVision, a novel sensor that employs a compound-eye imaging system to combine near-field 3D visual and tactile sensing within a compact form factor. CompdVision utilizes two types of vision units to address diverse sensing needs, eliminating the need for complex modality conversion. Stereo units with far-focus lenses can see through the transparent elastomer for depth estimation beyond the contact surface. Simultaneously, tactile units with near-focus lenses track the movement of markers embedded in the elastomer to obtain contact deformation. Experimental results validate the sensor's superior performance in 3D visual and tactile sensing, proving its capability for reliable external object depth estimation and precise measurement of tangential and normal contact forces. The dual modalities and compact design make the sensor a versatile tool for robotic manipulation.
Read more7/19/2024
🎲
0
Cyclic Fusion of Measuring Information in Curved Elastomer Contact via Vision-Based Tactile Sensing
Zilan Li, Zhibin Zou, Weiliang Xu, Yuanzhi Zhou, Guoyuan Zhou, Muxing Huang, Xuan Huang, Xinming Li
Using elastomer deformation to measure object surface features in tactile sensing is effective, as it captures microscale deformations through densely arranged optical imaging sensors that detect subtle data variations. To enable continuous contact recognition, elastomers are crafted with curved surfaces to adjust to changes in the contact area. However, this design leads to uneven deformations, distorting tactile images and inaccurately reflecting the true elastomer deformations. This inconsistency considerably reduces the utility of the tactile data. In this work, we propose a cyclic fusion strategy for vision-based tactile sensing for precise contact data extraction and shape feature integration at the pixel level. Utilizing frequency domain fusion, the system merges topography as indicated by elastomer deformation, enhancing information content by over 40% and preserving structural consistency. Further, this system could effectively extract and summarize micro-scale contact features, using neural networks to achieve a detection mAP of 90.90% and classification accuracy of 99.83%. Using this strategy, the measurement minimizes data interference, accurately depicting object morphology on tactile images and enhancing tactile sensation restoration.
Read more7/23/2024

0
EyeSight Hand: Design of a Fully-Actuated Dexterous Robot Hand with Integrated Vision-Based Tactile Sensors and Compliant Actuation
Branden Romero, Hao-Shu Fang, Pulkit Agrawal, Edward Adelson
In this work, we introduce the EyeSight Hand, a novel 7 degrees of freedom (DoF) humanoid hand featuring integrated vision-based tactile sensors tailored for enhanced whole-hand manipulation. Additionally, we introduce an actuation scheme centered around quasi-direct drive actuation to achieve human-like strength and speed while ensuring robustness for large-scale data collection. We evaluate the EyeSight Hand on three challenging tasks: bottle opening, plasticine cutting, and plate pick and place, which require a blend of complex manipulation, tool use, and precise force application. Imitation learning models trained on these tasks, with a novel vision dropout strategy, showcase the benefits of tactile feedback in enhancing task success rates. Our results reveal that the integration of tactile sensing dramatically improves task performance, underscoring the critical role of tactile information in dexterous manipulation.
Read more8/13/2024

0
Robot Synesthesia: In-Hand Manipulation with Visuotactile Sensing
Ying Yuan, Haichuan Che, Yuzhe Qin, Binghao Huang, Zhao-Heng Yin, Kang-Won Lee, Yi Wu, Soo-Chul Lim, Xiaolong Wang
Executing contact-rich manipulation tasks necessitates the fusion of tactile and visual feedback. However, the distinct nature of these modalities poses significant challenges. In this paper, we introduce a system that leverages visual and tactile sensory inputs to enable dexterous in-hand manipulation. Specifically, we propose Robot Synesthesia, a novel point cloud-based tactile representation inspired by human tactile-visual synesthesia. This approach allows for the simultaneous and seamless integration of both sensory inputs, offering richer spatial information and facilitating better reasoning about robot actions. The method, trained in a simulated environment and then deployed to a real robot, is applicable to various in-hand object rotation tasks. Comprehensive ablations are performed on how the integration of vision and touch can improve reinforcement learning and Sim2Real performance. Our project page is available at https://yingyuan0414.github.io/visuotactile/ .
Read more8/1/2024