Computer vision tasks for intelligent aerospace missions: An overview

0

Sign in to get full access
Overview
This paper provides an overview of computer vision tasks for intelligent aerospace perception. It covers the key concepts, methods, and challenges in applying computer vision techniques to aerospace applications, such as autonomous vehicles, 3D object recognition, and occupancy prediction.
Plain English Explanation
The paper looks at how computer vision, the field of using machines to analyze and understand digital images and videos, can be applied to aerospace systems like aircraft and spacecraft. Computer vision techniques allow these systems to perceive and make sense of their surroundings, which is crucial for tasks like autonomous navigation, object detection, and situational awareness.
The paper discusses the special considerations that come into play when using computer vision for aerospace applications, compared to more common uses in areas like autonomous driving or industrial automation. For example, aerospace environments often involve unique lighting conditions, fast-moving objects, and the need to operate reliably in challenging conditions.
The paper also covers some of the specific computer vision tasks that are important for aerospace, such as 3D object recognition and occupancy prediction. These capabilities allow aerospace systems to understand the 3D structure of their surroundings and anticipate potential obstacles or hazards.
Technical Explanation
The paper first provides an overview of the key computer vision tasks and methods that are relevant for aerospace applications. These include object detection and recognition, 3D reconstruction, semantic segmentation, and occupancy prediction. The authors highlight how these tasks need to be adapted and enhanced to work reliably in the complex and dynamic environments found in aerospace scenarios.
The paper then delves into the specific technical challenges involved in applying computer vision to aerospace systems. These include dealing with varying lighting conditions, fast-moving objects, limited sensor data, and the need for real-time, robust performance. The authors discuss how recent advances in deep learning and sensor fusion techniques are helping to address these challenges.
Several case studies are presented that demonstrate the application of computer vision to problems like autonomous landing, space situational awareness, and unmanned aerial vehicle navigation. The authors analyze the strengths and limitations of the proposed approaches, and identify areas for future research and development.
Critical Analysis
The paper provides a comprehensive overview of the state-of-the-art in computer vision for aerospace applications. It does a good job of highlighting the unique challenges and requirements of this domain, and how existing computer vision techniques need to be adapted and enhanced to work effectively.
One area that could be explored further is the issue of safety and reliability. Given the high-stakes nature of many aerospace applications, there is a critical need for computer vision systems that can operate with a very low error rate and high levels of robustness. The paper touches on this, but more detailed discussion of safety assurance mechanisms and validation processes would be valuable.
Additionally, the paper focuses primarily on the technical aspects of computer vision for aerospace, but does not delve deeply into the broader implications and societal impacts. As these technologies become more widely adopted, there will be important considerations around privacy, ethics, and the social consequences that warrant further exploration.
Overall, this paper provides a solid foundation for understanding the current state of the art in this field, and identifies promising directions for future research and development.
Conclusion
This paper presents a comprehensive overview of the application of computer vision techniques to intelligent aerospace perception. It covers the key concepts, methods, and challenges involved in adapting computer vision to the unique requirements of aerospace environments and operations.
The paper highlights the potential of computer vision to enable a wide range of capabilities for aerospace systems, from autonomous navigation and object detection to 3D reconstruction and occupancy prediction. However, it also underscores the significant technical hurdles that must be overcome to ensure these systems are reliable, robust, and safe.
As computer vision continues to advance, its integration into aerospace applications will likely have far-reaching implications for the future of aviation, space exploration, and other aerospace domains. This paper provides a valuable reference point for researchers, engineers, and policymakers working to unlock the full potential of this transformative technology.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Computer vision tasks for intelligent aerospace missions: An overview
Huilin Chen, Qiyu Sun, Fangfei Li, Yang Tang
Computer vision tasks are crucial for aerospace missions as they help spacecraft to understand and interpret the space environment, such as estimating position and orientation, reconstructing 3D models, and recognizing objects, which have been extensively studied to successfully carry out the missions. However, traditional methods like Kalman Filtering, Structure from Motion, and Multi-View Stereo are not robust enough to handle harsh conditions, leading to unreliable results. In recent years, deep learning (DL)-based perception technologies have shown great potential and outperformed traditional methods, especially in terms of their robustness to changing environments. To further advance DL-based aerospace perception, various frameworks, datasets, and strategies have been proposed, indicating significant potential for future applications. In this survey, we aim to explore the promising techniques used in perception tasks and emphasize the importance of DL-based aerospace perception. We begin by providing an overview of aerospace perception, including classical space programs developed in recent years, commonly used sensors, and traditional perception methods. Subsequently, we delve into three fundamental perception tasks in aerospace missions: pose estimation, 3D reconstruction, and recognition, as they are basic and crucial for subsequent decision-making and control. Finally, we discuss the limitations and possibilities in current research and provide an outlook on future developments, including the challenges of working with limited datasets, the need for improved algorithms, and the potential benefits of multi-source information fusion.
Read more7/10/2024

0
A Comprehensive Review of 3D Object Detection in Autonomous Driving: Technological Advances and Future Directions
Yu Wang, Shaohua Wang, Yicheng Li, Mingchun Liu
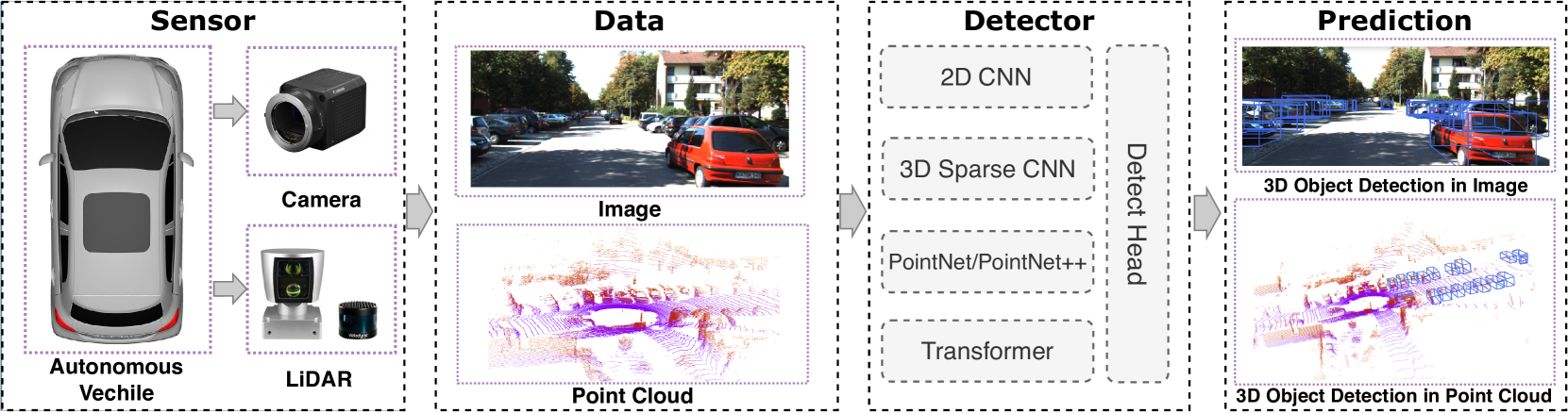
In recent years, 3D object perception has become a crucial component in the development of autonomous driving systems, providing essential environmental awareness. However, as perception tasks in autonomous driving evolve, their variants have increased, leading to diverse insights from industry and academia. Currently, there is a lack of comprehensive surveys that collect and summarize these perception tasks and their developments from a broader perspective. This review extensively summarizes traditional 3D object detection methods, focusing on camera-based, LiDAR-based, and fusion detection techniques. We provide a comprehensive analysis of the strengths and limitations of each approach, highlighting advancements in accuracy and robustness. Furthermore, we discuss future directions, including methods to improve accuracy such as temporal perception, occupancy grids, and end-to-end learning frameworks. We also explore cooperative perception methods that extend the perception range through collaborative communication. By providing a holistic view of the current state and future developments in 3D object perception, we aim to offer a more comprehensive understanding of perception tasks for autonomous driving. Additionally, we have established an active repository to provide continuous updates on the latest advancements in this field, accessible at: https://github.com/Fishsoup0/Autonomous-Driving-Perception.
Read more8/30/2024
👀
0
Applications of Computer Vision in Autonomous Vehicles: Methods, Challenges and Future Directions
Xingshuai Dong, Massimiliano L. Cappuccio
Autonomous vehicle refers to a vehicle capable of perceiving its surrounding environment and driving with little or no human driver input. The perception system is a fundamental component which enables the autonomous vehicle to collect data and extract relevant information from the environment to drive safely. Benefit from the recent advances in computer vision, the perception task can be achieved by using sensors, such as camera, LiDAR, radar, and ultrasonic sensor. This paper reviews publications on computer vision and autonomous driving that are published during the last ten years. In particular, we first investigate the development of autonomous driving systems and summarize these systems that are developed by the major automotive manufacturers from different countries. Second, we investigate the sensors and benchmark data sets that are commonly utilized for autonomous driving. Then, a comprehensive overview of computer vision applications for autonomous driving such as depth estimation, object detection, lane detection, and traffic sign recognition are discussed. Additionally, we review public opinions and concerns on autonomous vehicles. Based on the discussion, we analyze the current technological challenges that autonomous vehicles meet with. Finally, we present our insights and point out some promising directions for future research. This paper will help the reader to understand autonomous vehicles from the perspectives of academia and industry.
Read more6/18/2024
0
Robustness-Aware 3D Object Detection in Autonomous Driving: A Review and Outlook
Ziying Song, Lin Liu, Feiyang Jia, Yadan Luo, Guoxin Zhang, Lei Yang, Li Wang, Caiyan Jia
In the realm of modern autonomous driving, the perception system is indispensable for accurately assessing the state of the surrounding environment, thereby enabling informed prediction and planning. The key step to this system is related to 3D object detection that utilizes vehicle-mounted sensors such as LiDAR and cameras to identify the size, the category, and the location of nearby objects. Despite the surge in 3D object detection methods aimed at enhancing detection precision and efficiency, there is a gap in the literature that systematically examines their resilience against environmental variations, noise, and weather changes. This study emphasizes the importance of robustness, alongside accuracy and latency, in evaluating perception systems under practical scenarios. Our work presents an extensive survey of camera-only, LiDAR-only, and multi-modal 3D object detection algorithms, thoroughly evaluating their trade-off between accuracy, latency, and robustness, particularly on datasets like KITTI-C and nuScenes-C to ensure fair comparisons. Among these, multi-modal 3D detection approaches exhibit superior robustness, and a novel taxonomy is introduced to reorganize the literature for enhanced clarity. This survey aims to offer a more practical perspective on the current capabilities and the constraints of 3D object detection algorithms in real-world applications, thus steering future research towards robustness-centric advancements.
Read more8/16/2024