A Conflicts-free, Speed-lossless KAN-based Reinforcement Learning Decision System for Interactive Driving in Roundabouts

0

Sign in to get full access
Overview
- Presents a reinforcement learning-based decision system for autonomous vehicles navigating interactive driving scenarios in roundabouts
- Aims to achieve conflict-free and speed-lossless driving by leveraging a Kolmogorov-Arnold Network (KAN) architecture
- Experimental results demonstrate improved safety and efficiency compared to traditional reinforcement learning approaches
Plain English Explanation
This paper describes a new approach for autonomous vehicles to navigate roundabouts, a common type of traffic intersection. The goal is to allow the vehicle to make decisions that avoid conflicts with other cars while also maintaining a high speed and efficiency.
The key innovation is the use of a Kolmogorov-Arnold Network (KAN), a type of neural network architecture. This allows the vehicle to learn how to drive through the roundabout by trial and error, similar to how a human driver would learn, but in a way that prioritizes safety and speed.
The results show this KAN-based reinforcement learning approach performs better than traditional reinforcement learning methods, resulting in fewer conflicts with other vehicles and faster travel times through the roundabout. This could lead to more reliable and efficient autonomous driving in complex, interactive scenarios.
Technical Explanation
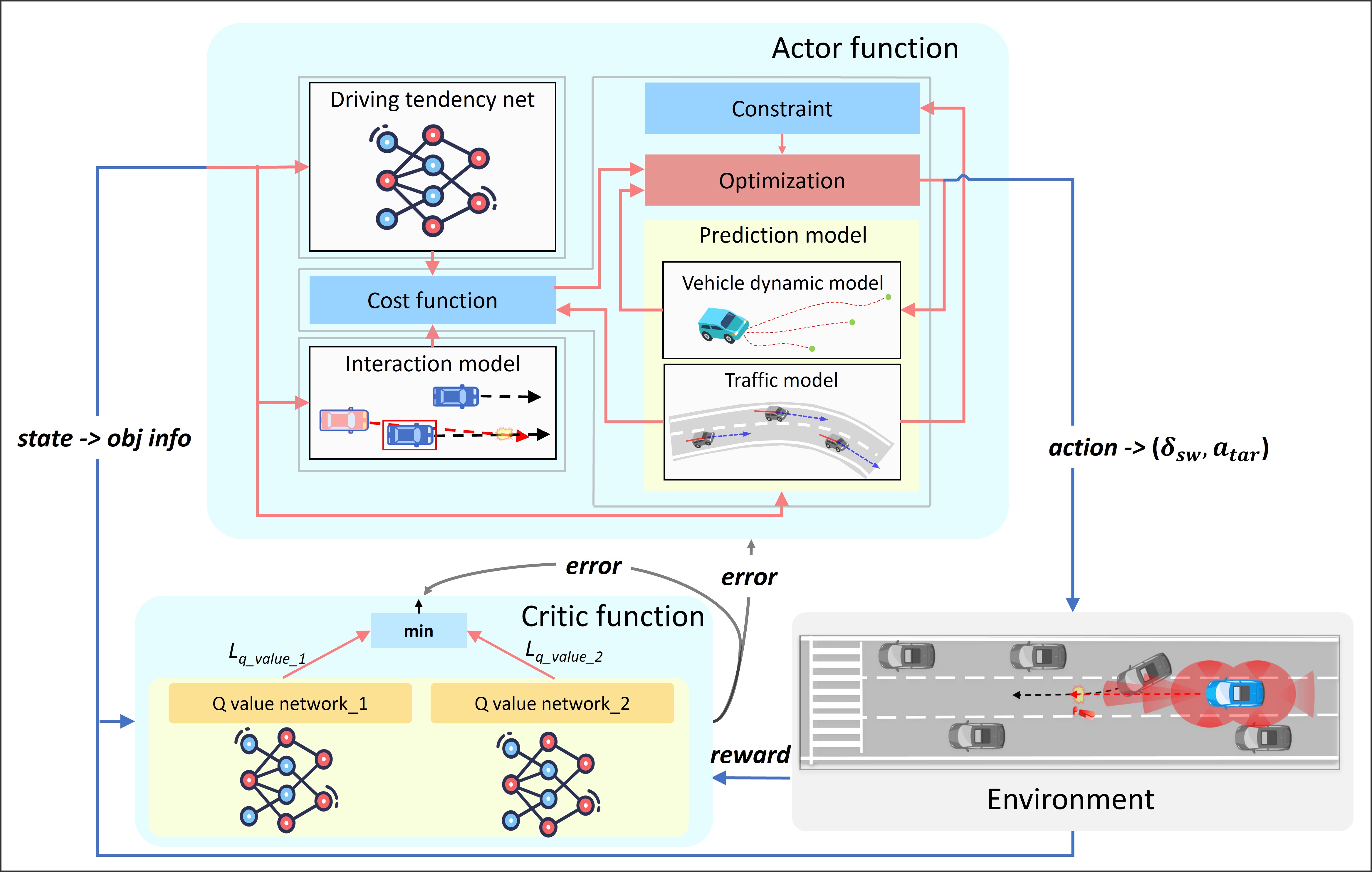
The paper presents a reinforcement learning-based decision system for autonomous vehicles navigating roundabouts. The system leverages a Kolmogorov-Arnold Network (KAN) architecture to learn a conflict-free and speed-lossless driving policy.
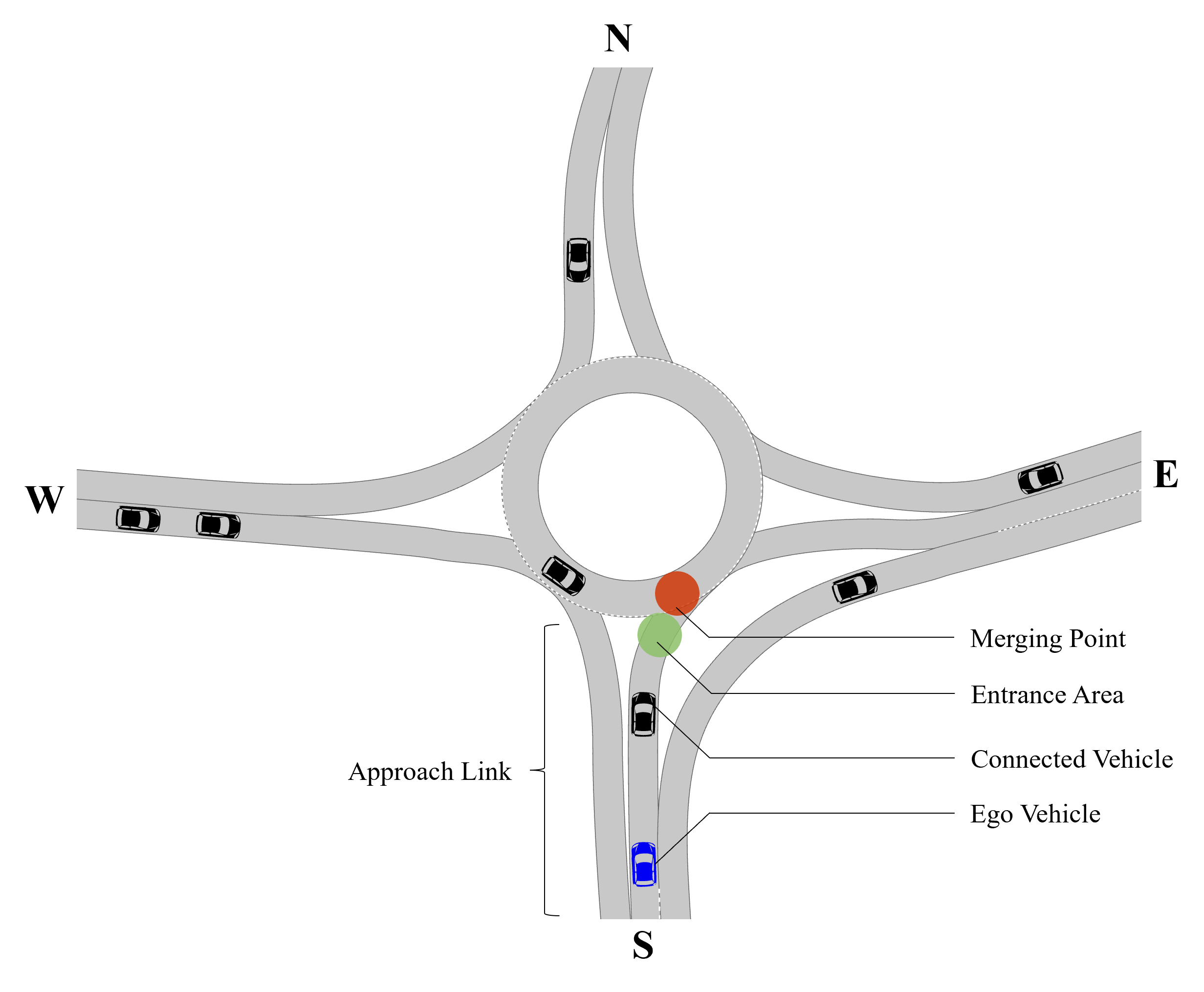
In the proposed approach, the autonomous vehicle uses sensors to perceive the current state of the roundabout, including the positions and velocities of surrounding vehicles. This state information is fed into the KAN-based reinforcement learning model, which then outputs an action, such as accelerating, decelerating, or changing lanes.
The key innovation is the KAN architecture, which allows the model to learn a decision policy that prioritizes both safety (avoiding collisions) and efficiency (maintaining high speeds). This is achieved by structuring the neural network in a way that separates the optimization of safety constraints from the optimization of speed objectives.
Experimental results on simulated roundabout scenarios show that the KAN-based reinforcement learning system outperforms traditional reinforcement learning approaches in terms of safety (fewer conflicts with other vehicles) and speed (higher average speeds). This suggests the proposed method could lead to more reliable and efficient autonomous driving in complex, interactive environments like roundabouts.
Critical Analysis
The paper presents a promising approach for autonomous vehicle decision-making in roundabouts, but there are a few potential limitations and areas for further research:
-
Simulation-based evaluation: The experiments were conducted in a simulated environment, which may not fully capture the complexities of real-world driving scenarios. Further testing and validation on physical test tracks or in real-world deployments would be valuable to assess the system's performance in more realistic conditions.
-
Scalability and generalization: The paper focuses on a single roundabout scenario. It's unclear how well the proposed approach would scale to more complex road networks or handle different types of intersections and traffic patterns. Evaluating the system's ability to generalize to a wider range of driving environments would be an important next step.
-
Ethical and legal considerations: Autonomous driving systems must be designed with careful consideration of ethical and legal implications, such as liability in the event of accidents. The paper does not address these important aspects, which would need to be carefully addressed before real-world deployment.
-
Computational efficiency: The computational complexity of the KAN architecture is not discussed. In real-time driving applications, the decision-making system must be able to process sensor data and generate actions quickly, which could be a challenge for complex neural network models.
Overall, the paper presents an interesting and potentially useful approach for autonomous vehicle decision-making in roundabouts, but further research and validation would be needed to fully assess its capabilities and limitations.
Conclusion
This paper introduces a reinforcement learning-based decision system for autonomous vehicles navigating interactive driving scenarios in roundabouts. The key innovation is the use of a Kolmogorov-Arnold Network (KAN) architecture, which allows the system to learn a conflict-free and speed-lossless driving policy.
Experimental results demonstrate that the proposed KAN-based approach outperforms traditional reinforcement learning methods in terms of safety (fewer conflicts) and efficiency (higher speeds). This suggests the technique could lead to more reliable and effective autonomous driving in complex, interactive environments like roundabouts.
While further research is needed to address potential limitations and real-world deployment challenges, this work represents an important step forward in the development of advanced autonomous driving systems capable of navigating challenging traffic scenarios.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
A Conflicts-free, Speed-lossless KAN-based Reinforcement Learning Decision System for Interactive Driving in Roundabouts
Zhihao Lin, Zhen Tian, Qi Zhang, Ziyang Ye, Hanyang Zhuang, Jianglin Lan
Safety and efficiency are crucial for autonomous driving in roundabouts, especially in the context of mixed traffic where autonomous vehicles (AVs) and human-driven vehicles coexist. This paper introduces a learning-based algorithm tailored to foster safe and efficient driving behaviors across varying levels of traffic flows in roundabouts. The proposed algorithm employs a deep Q-learning network to effectively learn safe and efficient driving strategies in complex multi-vehicle roundabouts. Additionally, a KAN (Kolmogorov-Arnold network) enhances the AVs' ability to learn their surroundings robustly and precisely. An action inspector is integrated to replace dangerous actions to avoid collisions when the AV interacts with the environment, and a route planner is proposed to enhance the driving efficiency and safety of the AVs. Moreover, a model predictive control is adopted to ensure stability and precision of the driving actions. The results show that our proposed system consistently achieves safe and efficient driving whilst maintaining a stable training process, as evidenced by the smooth convergence of the reward function and the low variance in the training curves across various traffic flows. Compared to state-of-the-art benchmarks, the proposed algorithm achieves a lower number of collisions and reduced travel time to destination.
Read more8/16/2024
0
Queue-based Eco-Driving at Roundabouts with Reinforcement Learning
Anna-Lena Schlamp, Werner Huber, Stefanie Schmidtner
We address eco-driving at roundabouts in mixed traffic to enhance traffic flow and traffic efficiency in urban areas. The aim is to proactively optimize speed of automated or non-automated connected vehicles (CVs), ensuring both an efficient approach and smooth entry into roundabouts. We incorporate the traffic situation ahead, i.e. preceding vehicles and waiting queues. Further, we develop two approaches: a rule-based and an Reinforcement Learning (RL) based eco-driving system, with both using the approach link and information from conflicting CVs for speed optimization. A fair comparison of rule-based and RL-based approaches is performed to explore RL as a viable alternative to classical optimization. Results show that both approaches outperform the baseline. Improvements significantly increase with growing traffic volumes, leading to best results on average being obtained at high volumes. Near capacity, performance deteriorates, indicating limited applicability at capacity limits. Examining different CV penetration rates, a decline in performance is observed, but with substantial results still being achieved at lower CV rates. RL agents can discover effective policies for speed optimization in dynamic roundabout settings, but they do not offer a substantial advantage over classical approaches, especially at higher traffic volumes or lower CV penetration rates.
Read more7/19/2024
🛠️
0
Parallel Optimization with Hard Safety Constraints for Cooperative Planning of Connected Autonomous Vehicles
Zhenmin Huang, Haichao Liu, Shaojie Shen, Jun Ma
The development of connected autonomous vehicles (CAVs) facilitates the enhancement of traffic efficiency in complicated scenarios. In unsignalized roundabout scenarios, difficulties remain unsolved in developing an effective and efficient coordination strategy for CAVs. In this paper, we formulate the cooperative autonomous driving problem of CAVs in the roundabout scenario as a constrained optimal control problem, and propose a computationally-efficient parallel optimization framework to generate strategies for CAVs such that the travel efficiency is improved with hard safety guarantees. All constraints involved in the roundabout scenario are addressed appropriately with convex approximation, such that the convexity property of the reformulated optimization problem is exhibited. Then, a parallel optimization algorithm is presented to solve the reformulated optimization problem, where an embodied iterative nearest neighbor search strategy to determine the optimal passing sequence in the roundabout scenario. It is noteworthy that the travel efficiency in the roundabout scenario is enhanced and the computation burden is considerably alleviated with the innovation development. We also examine the proposed method in CARLA simulator and perform thorough comparisons with a rule-based baseline and the commonly used IPOPT optimization solver to demonstrate the effectiveness and efficiency of the proposed approach.
Read more5/7/2024
0
A Safe and Efficient Self-evolving Algorithm for Decision-making and Control of Autonomous Driving Systems
Shuo Yang, Liwen Wang, Yanjun Huang, Hong Chen
Autonomous vehicles with a self-evolving ability are expected to cope with unknown scenarios in the real-world environment. Take advantage of trial and error mechanism, reinforcement learning is able to self evolve by learning the optimal policy, and it is particularly well suitable for solving decision-making problems. However, reinforcement learning suffers from safety issues and low learning efficiency, especially in the continuous action space. Therefore, the motivation of this paper is to address the above problem by proposing a hybrid Mechanism-Experience-Learning augmented approach. Specifically, to realize the efficient self-evolution, the driving tendency by analogy with human driving experience is proposed to reduce the search space of the autonomous driving problem, while the constrained optimization problem based on a mechanistic model is designed to ensure safety during the self-evolving process. Experimental results show that the proposed method is capable of generating safe and reasonable actions in various complex scenarios, improving the performance of the autonomous driving system. Compared to conventional reinforcement learning, the safety and efficiency of the proposed algorithm are greatly improved. The training process is collision-free, and the training time is equivalent to less than 10 minutes in the real world.
Read more8/23/2024