Contact-conditioned learning of locomotion policies

0

Sign in to get full access
Overview
- This paper presents a method for learning contact-conditioned locomotion policies for legged robots.
- The approach uses a novel neural network architecture that conditions the robot's actions on its current and desired contact state.
- Experiments show the method can learn versatile locomotion skills across different terrains and contact configurations.
Plain English Explanation
The paper describes a way for legged robots to learn how to move around efficiently by taking into account the contacts (or points of touch) between the robot's feet and the ground. The key idea is to create a neural network model that can generate the robot's movements while being "aware" of the current and desired contact state.
This is important because a legged robot's movements depend a lot on where its feet are making contact with the environment. By explicitly incorporating this contact information, the model can learn more flexible and versatile locomotion skills, allowing the robot to navigate different terrains and situations more effectively.
The paper demonstrates this approach through various experiments, showing the robots can learn to locomote in diverse contact-rich settings, like walking on uneven ground or transitioning between different contact configurations. This contact-aware learning enables the robots to move in a more natural and adaptable way, which could be valuable for real-world applications.
Technical Explanation
The paper introduces a Contact-Conditioned Locomotion Policy (CCLP) framework, which is a neural network architecture that conditions the robot's actions on its current and desired contact state. This allows the model to learn policies that can generate effective locomotion skills while accounting for the robot's contacts with the environment.
The key components of the CCLP framework are:
- A contact encoding module that represents the robot's current and desired contact state
- A locomotion policy network that takes the contact encoding as input and outputs the robot's actions
- A training procedure that uses reinforcement learning to optimize the policy network
The authors evaluate the CCLP framework on various legged robot simulation environments, including challenging contact-rich scenarios. The results demonstrate that the contact-conditioned approach can learn more versatile and robust locomotion skills compared to baseline methods that do not explicitly model contact information.
Critical Analysis
The paper makes a compelling case for the importance of incorporating contact-awareness into legged robot locomotion policies. The CCLP framework is a novel and well-designed approach that seems to offer significant performance benefits over prior methods.
However, the paper does not address some potential limitations or caveats of the approach. For example, it is unclear how the framework would scale to more complex robot morphologies or real-world environments with greater uncertainty and disturbances. Additionally, the reliance on simulation-based training could raise questions about the transferability of the learned policies to physical robot hardware.
Further research may be needed to explore the robustness and generalization capabilities of the CCLP framework, as well as its computational and sample efficiency compared to other state-of-the-art locomotion learning methods. Expanding the evaluation to more diverse terrains, contact configurations, and real-world scenarios could also help validate the broader applicability of the approach.
Conclusion
This paper presents an effective way for legged robots to learn locomotion policies that are explicitly conditioned on the robot's contact state with the environment. By incorporating this contact-awareness into the neural network architecture, the CCLP framework can learn versatile and adaptable locomotion skills, outperforming baseline methods in challenging contact-rich scenarios.
The contact-conditioned approach could have significant implications for developing more capable and agile legged robots, with applications in areas like navigation, exploration, and manipulation. While the paper raises some questions about the approach's scalability and real-world transferability, it represents an important step forward in the field of contact-aware locomotion learning.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Contact-conditioned learning of locomotion policies
Michal Ciebielski, Majid Khadiv
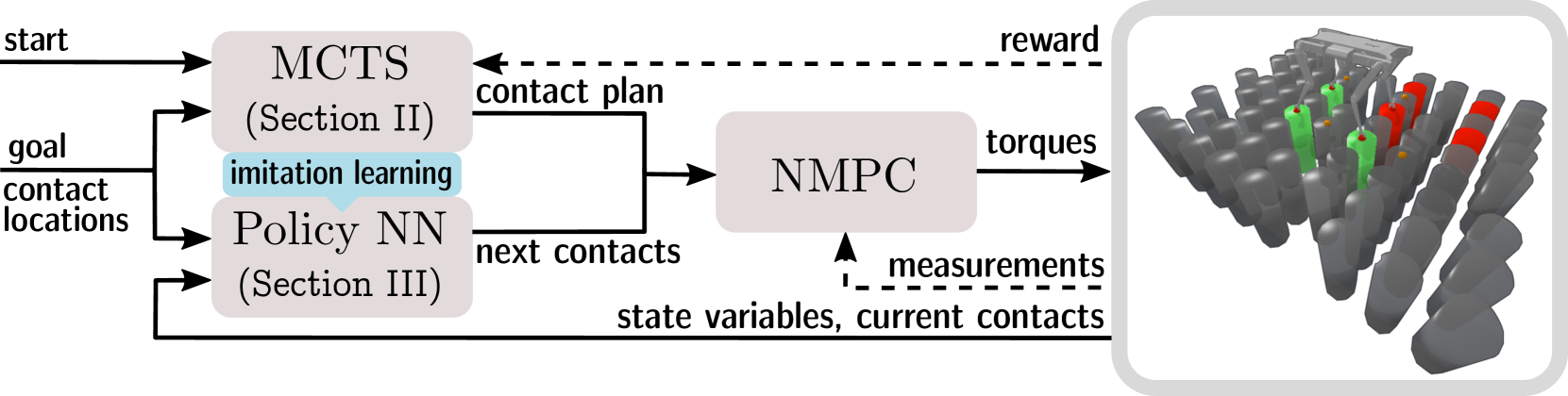
Locomotion is realized through making and breaking contact. State-of-the-art constrained nonlinear model predictive controllers (NMPC) generate whole-body trajectories for a given contact sequence. However, these approaches are computationally expensive at run-time. Hence it is desirable to offload some of this computation to an offline phase. In this paper, we hypothesize that conditioning a learned policy on the locations and timings of contact is a suitable representation for learning a single policy that can generate multiple gaits (contact sequences). In this way, we can build a single generalist policy to realize different gaited and non-gaited locomotion skills and the transitions among them. Our extensive simulation results demonstrate the validity of our hypothesis for learning multiple gaits for a biped robot.
Read more8/6/2024
0
Diffusion-based learning of contact plans for agile locomotion
Victor Dh'edin, Adithya Kumar Chinnakkonda Ravi, Armand Jordana, Huaijiang Zhu, Avadesh Meduri, Ludovic Righetti, Bernhard Scholkopf, Majid Khadiv
Legged robots have become capable of performing highly dynamic maneuvers in the past few years. However, agile locomotion in highly constrained environments such as stepping stones is still a challenge. In this paper, we propose a combination of model-based control, search, and learning to design efficient control policies for agile locomotion on stepping stones. In our framework, we use nonlinear model predictive control (NMPC) to generate whole-body motions for a given contact plan. To efficiently search for an optimal contact plan, we propose to use Monte Carlo tree search (MCTS). While the combination of MCTS and NMPC can quickly find a feasible plan for a given environment (a few seconds), it is not yet suitable to be used as a reactive policy. Hence, we generate a dataset for optimal goal-conditioned policy for a given scene and learn it through supervised learning. In particular, we leverage the power of diffusion models in handling multi-modality in the dataset. We test our proposed framework on a scenario where our quadruped robot Solo12 successfully jumps to different goals in a highly constrained environment.
Read more7/17/2024

0
Learning feasible transitions for efficient contact planning
Rikhat Akizhanov, Victor Dh'edin, Majid Khadiv, Ivan Laptev
Contact planning for legged robots in extremely constrained environments is challenging. The main difficulty stems from the mixed nature of the problem, discrete search together with continuous trajectory optimization. To speed up the discrete search problem, we propose in this paper to learn the properties of transitions from one contact mode to the next. In particular, we learn a feasibility classifier and an offset network; the former predicts if a potential next contact state is feasible from the current contact state, while the latter learns to compensate for misalignment in achieving a desired contact state due to imperfections of the low-level control. We integrate these learned networks in a Monte Carlo Tree Search (MCTS) contact planner to better prune the tree and improve the heuristic. Our simulation results demonstrate that training these networks with offline data significantly speeds up the online search process and improves its accuracy.
Read more7/17/2024
0
Non-Gaited Legged Locomotion with Monte-Carlo Tree Search and Supervised Learning
Ilyass Taouil, Lorenzo Amatucci, Majid Khadiv, Angela Dai, Victor Barasuol, Giulio Turrisi, Claudio Semini
Legged robots are able to navigate complex terrains by continuously interacting with the environment through careful selection of contact sequences and timings. However, the combinatorial nature behind contact planning hinders the applicability of such optimization problems on hardware. In this work, we present a novel approach that optimizes gait sequences and respective timings for legged robots in the context of optimization-based controllers through the use of sampling-based methods and supervised learning techniques. We propose to bootstrap the search by learning an optimal value function in order to speed-up the gait planning procedure making it applicable in real-time. To validate our proposed method, we showcase its performance both in simulation and on hardware using a 22 kg electric quadruped robot. The method is assessed on different terrains, under external perturbations, and in comparison to a standard control approach where the gait sequence is fixed a priori.
Read more8/15/2024