Learning feasible transitions for efficient contact planning

0

Sign in to get full access
Overview
- This paper presents a novel approach for efficient search and learning of agile locomotion on stepping stones.
- The proposed method combines a Monte-Carlo Tree Search (MCTS) algorithm for contact planning with a learning-based policy optimizer.
- The system is designed to enable robots to navigate challenging terrain by intelligently planning their footsteps and learning effective locomotion strategies.
Plain English Explanation
The research aims to help robots move quickly and smoothly across uneven ground, such as stepping stones or rocky paths. Traditionally, robots have struggled with this type of terrain because it requires precise foot placement and agile maneuvering.
The key innovation of this work is the combination of two powerful techniques: Monte-Carlo Tree Search (MCTS) for planning the robot's footsteps, and a learning-based policy optimizer for improving the robot's locomotion skills over time.
The MCTS algorithm allows the robot to rapidly explore different possibilities for where to place its feet, evaluating the potential outcomes of each step. This enables the robot to plan a efficient path across the stones or rocks, avoiding missteps.
The learning-based policy optimizer then takes this contact plan and uses it to train the robot's locomotion controllers. Over many trials, the robot learns how to execute the planned movements with increasing smoothness and agility. This allows the robot to navigate challenging terrain more reliably and at higher speeds.
By integrating these two components - efficient search and iterative learning - the system is able to tackle the complex problem of agile locomotion on stepping stones in a powerful and flexible way.
Technical Explanation
The paper introduces a framework that combines Monte-Carlo Tree Search (MCTS) for contact planning with a learning-based policy optimizer. This hybrid approach allows the robot to efficiently search for and learn effective locomotion strategies for navigating across stepping stones.
The MCTS component constructs a search tree to explore possible sequences of footstep placements. It evaluates the outcomes of these contact plans using a learned value function and selects the most promising options to expand further. This enables the robot to rapidly identify feasible paths across the terrain.
The policy optimizer then takes the contact plan produced by MCTS and uses it to train a deep neural network controller. This learning-based module gradually improves the robot's ability to execute the planned movements, resulting in smoother and more agile locomotion. The policy is updated through trial-and-error experience, with the robot receiving rewards for successful traversals.
The paper demonstrates the effectiveness of this approach through extensive simulations and real-world experiments. The robot is able to navigate complex stepping stone environments, outperforming baseline methods in terms of both speed and success rate. The authors also analyze the contributions of the MCTS and learning components, showing how they complement each other to enable robust and adaptable locomotion.
Critical Analysis
The proposed framework presents a compelling approach to the challenging problem of agile locomotion on stepping stones. By combining efficient search with iterative learning, the system is able to tackle the complexities of this task in a flexible and scalable way.
One potential limitation discussed in the paper is the reliance on accurate terrain models for the MCTS planning. In real-world scenarios, the robot may encounter unexpected or partially occluded obstacles, which could degrade the performance of the contact planner. Incorporating techniques for online terrain mapping and uncertainty handling could further improve the robustness of the system.
Additionally, the authors mention that the current policy optimizer requires a significant amount of training data to achieve high performance. Exploring more sample-efficient learning methods, such as energy-based contact planning under uncertainty or multi-contact stochastic predictive control, could help reduce the training burden and make the system more practical for real-world deployment.
Overall, this work presents a compelling and well-executed approach to the challenging problem of agile locomotion on stepping stones. The combination of MCTS-based planning and learning-based control shows promise, and the insights gained from this research could have broader applications in the field of legged robotics.
Conclusion
This paper introduced a novel framework for efficient search and learning of agile locomotion on stepping stones. By integrating a Monte-Carlo Tree Search (MCTS) algorithm for contact planning with a learning-based policy optimizer, the system is able to rapidly identify feasible paths across challenging terrain and gradually improve the robot's ability to execute the planned movements.
The key contributions of this work include the hybrid architecture that leverages the complementary strengths of search-based planning and data-driven learning, as well as the extensive evaluation of the approach through simulations and real-world experiments. While the current system has some limitations, the insights gained from this research could lead to further advancements in the field of legged robotics and enable more robust and adaptable navigation across unstructured environments.
Overall, this work represents an important step forward in the quest to develop highly capable and agile robots that can navigate the complex and unpredictable real world with ease.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Learning feasible transitions for efficient contact planning
Rikhat Akizhanov, Victor Dh'edin, Majid Khadiv, Ivan Laptev
Contact planning for legged robots in extremely constrained environments is challenging. The main difficulty stems from the mixed nature of the problem, discrete search together with continuous trajectory optimization. To speed up the discrete search problem, we propose in this paper to learn the properties of transitions from one contact mode to the next. In particular, we learn a feasibility classifier and an offset network; the former predicts if a potential next contact state is feasible from the current contact state, while the latter learns to compensate for misalignment in achieving a desired contact state due to imperfections of the low-level control. We integrate these learned networks in a Monte Carlo Tree Search (MCTS) contact planner to better prune the tree and improve the heuristic. Our simulation results demonstrate that training these networks with offline data significantly speeds up the online search process and improves its accuracy.
Read more7/17/2024
0
Diffusion-based learning of contact plans for agile locomotion
Victor Dh'edin, Adithya Kumar Chinnakkonda Ravi, Armand Jordana, Huaijiang Zhu, Avadesh Meduri, Ludovic Righetti, Bernhard Scholkopf, Majid Khadiv
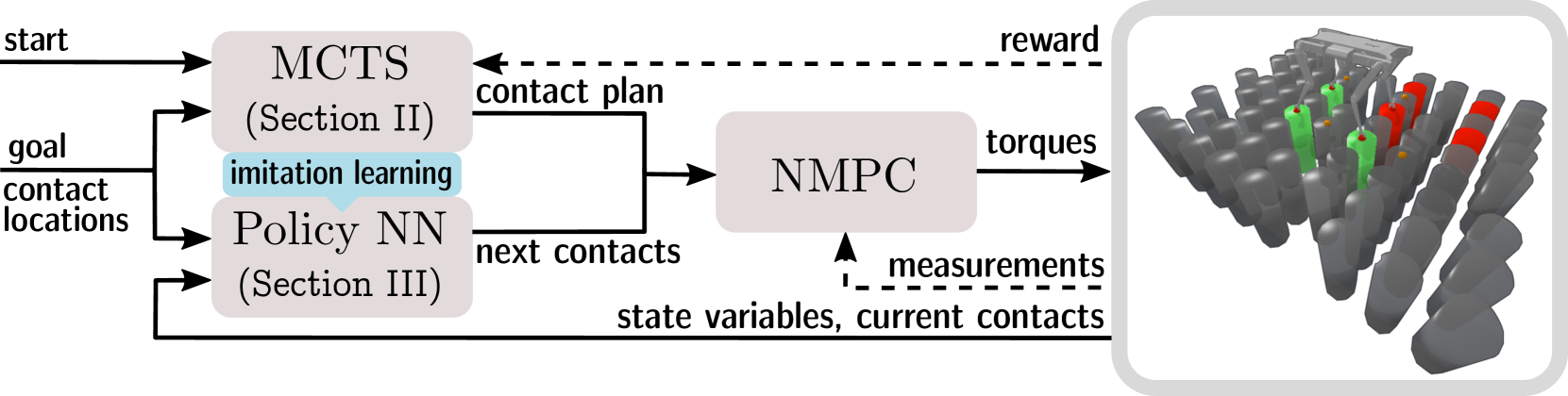
Legged robots have become capable of performing highly dynamic maneuvers in the past few years. However, agile locomotion in highly constrained environments such as stepping stones is still a challenge. In this paper, we propose a combination of model-based control, search, and learning to design efficient control policies for agile locomotion on stepping stones. In our framework, we use nonlinear model predictive control (NMPC) to generate whole-body motions for a given contact plan. To efficiently search for an optimal contact plan, we propose to use Monte Carlo tree search (MCTS). While the combination of MCTS and NMPC can quickly find a feasible plan for a given environment (a few seconds), it is not yet suitable to be used as a reactive policy. Hence, we generate a dataset for optimal goal-conditioned policy for a given scene and learn it through supervised learning. In particular, we leverage the power of diffusion models in handling multi-modality in the dataset. We test our proposed framework on a scenario where our quadruped robot Solo12 successfully jumps to different goals in a highly constrained environment.
Read more7/17/2024
🤿
0
ContactNet: Online Multi-Contact Planning for Acyclic Legged Robot Locomotion
Angelo Bratta, Avadesh Meduri, Michele Focchi, Ludovic Righetti, Claudio Semini
In legged logomotion, online trajectory optimization techniques generally depend on heuristic-based contact planners in order to have low computation times and achieve high replanning frequencies. In this work, we propose ContactNet, a fast acyclic contact planner based on a multi-output regression neural network. ContactNet ranks discretized stepping regions, allowing to quickly choose the best feasible solution, even in complex environments. The low computation time, in the order of 1 ms, makes possible the execution of the contact planner concurrently with a trajectory optimizer in a Model Predictive Control (MPC) fashion. We demonstrate the effectiveness of the approach in simulation in different complex scenarios with the quadruped robot Solo12.
Read more5/3/2024

0
Contact-conditioned learning of locomotion policies
Michal Ciebielski, Majid Khadiv
Locomotion is realized through making and breaking contact. State-of-the-art constrained nonlinear model predictive controllers (NMPC) generate whole-body trajectories for a given contact sequence. However, these approaches are computationally expensive at run-time. Hence it is desirable to offload some of this computation to an offline phase. In this paper, we hypothesize that conditioning a learned policy on the locations and timings of contact is a suitable representation for learning a single policy that can generate multiple gaits (contact sequences). In this way, we can build a single generalist policy to realize different gaited and non-gaited locomotion skills and the transitions among them. Our extensive simulation results demonstrate the validity of our hypothesis for learning multiple gaits for a biped robot.
Read more8/6/2024