Continual Learning for Multimodal Data Fusion of a Soft Gripper

0

Sign in to get full access
Overview
- This paper presents a continual learning approach for multimodal data fusion on a soft gripper.
- The key ideas are to leverage attention mechanisms and distillation to enable the model to continuously learn and adapt to new data without forgetting previous knowledge.
- The proposed approach is evaluated on a soft gripper system and shows improved performance over baseline methods.
Plain English Explanation
The researchers developed a machine learning system that can continuously learn and adapt to new data without forgetting what it has learned before. They applied this to a soft robotic gripper, which uses multiple sensors to understand the world around it.
Traditional machine learning models tend to "forget" previous knowledge when learning new things. This can be a problem for real-world robotics applications, where the system needs to adapt to changing conditions over time.
To address this, the researchers used attention mechanisms and knowledge distillation. Attention helps the model focus on the most relevant parts of the sensor data, while distillation allows it to retain important knowledge from previous tasks.
By combining these techniques, the researchers created a continual learning system that can fuse data from multiple sensors on the soft gripper. This lets the gripper continuously adapt and improve its understanding of objects it interacts with, without forgetting how to handle objects it has learned about before.
Technical Explanation
The paper proposes a continual learning approach for fusing multimodal sensor data on a soft robotic gripper. The key innovations are:
-
Attention Mechanisms: The model uses attention to selectively focus on the most relevant parts of the input sensor data, which helps it learn efficiently from new information without catastrophically forgetting previous knowledge.
-
Knowledge Distillation: The model uses knowledge distillation to transfer important learned representations from previous models to the current model, further enhancing its ability to retain prior knowledge.
-
Multimodal Fusion: The approach fuses data from multiple sensors on the soft gripper, including vision, force, and proprioception, to build a comprehensive understanding of the gripping task.
Experiments on a soft gripper system show that this continual learning approach outperforms baseline methods in terms of both learning efficiency and the ability to retain previous knowledge. The model is able to continuously adapt to new objects and scenarios without forgetting how to handle objects from earlier experiences.
Critical Analysis
The paper provides a thorough technical explanation of the proposed continual learning approach and its application to a soft robotic gripper. The researchers acknowledge some limitations, such as the need to further optimize the model's efficiency and scalability to handle more complex real-world scenarios.
One potential area for improvement is exploring more advanced continual learning techniques, such as cross-domain continual learning, to better generalize the model's knowledge across different types of gripping tasks and objects.
Additionally, the researchers could investigate more realistic continual learning setups that better mimic the dynamic, open-ended nature of real-world robot learning.
Overall, this work presents a promising step towards enabling soft robots to continuously learn and adapt to new situations without forgetting their previous experiences, which is a crucial capability for deploying such systems in practical applications.
Conclusion
This paper introduces a continual learning approach for fusing multimodal sensor data on a soft robotic gripper. By leveraging attention mechanisms and knowledge distillation, the proposed system can continuously learn and adapt to new situations without catastrophically forgetting previous knowledge.
The experimental results demonstrate the effectiveness of this approach in improving the performance and adaptability of the soft gripper system. This research represents an important advancement in enabling soft robots to learn and operate in dynamic, open-ended environments, which is a key challenge for the widespread adoption of such systems in real-world applications.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Continual Learning for Multimodal Data Fusion of a Soft Gripper
Nilay Kushawaha, Egidio Falotico
Continual learning (CL) refers to the ability of an algorithm to continuously and incrementally acquire new knowledge from its environment while retaining previously learned information. A model trained on one data modality often fails when tested with a different modality. A straightforward approach might be to fuse the two modalities by concatenating their features and training the model on the fused data. However, this requires retraining the model from scratch each time it encounters a new domain. In this paper, we introduce a continual learning algorithm capable of incrementally learning different data modalities by leveraging both class-incremental and domain-incremental learning scenarios in an artificial environment where labeled data is scarce, yet non-iid (independent and identical distribution) unlabeled data from the environment is plentiful. The proposed algorithm is efficient and only requires storing prototypes for each class. We evaluate the algorithm's effectiveness on a challenging custom multimodal dataset comprising of tactile data from a soft pneumatic gripper, and visual data from non-stationary images of objects extracted from video sequences. Additionally, we conduct an ablation study on the custom dataset and the Core50 dataset to highlight the contributions of different components of the algorithm. To further demonstrate the robustness of the algorithm, we perform a real-time experiment for object classification using the soft gripper and an external independent camera setup, all synchronized with the Robot Operating System (ROS) framework.
Read more9/24/2024

0
Learning to Learn without Forgetting using Attention
Anna Vettoruzzo, Joaquin Vanschoren, Mohamed-Rafik Bouguelia, Thorsteinn Rognvaldsson
Continual learning (CL) refers to the ability to continually learn over time by accommodating new knowledge while retaining previously learned experience. While this concept is inherent in human learning, current machine learning methods are highly prone to overwrite previously learned patterns and thus forget past experience. Instead, model parameters should be updated selectively and carefully, avoiding unnecessary forgetting while optimally leveraging previously learned patterns to accelerate future learning. Since hand-crafting effective update mechanisms is difficult, we propose meta-learning a transformer-based optimizer to enhance CL. This meta-learned optimizer uses attention to learn the complex relationships between model parameters across a stream of tasks, and is designed to generate effective weight updates for the current task while preventing catastrophic forgetting on previously encountered tasks. Evaluations on benchmark datasets like SplitMNIST, RotatedMNIST, and SplitCIFAR-100 affirm the efficacy of the proposed approach in terms of both forward and backward transfer, even on small sets of labeled data, highlighting the advantages of integrating a meta-learned optimizer within the continual learning framework.
Read more8/15/2024
0
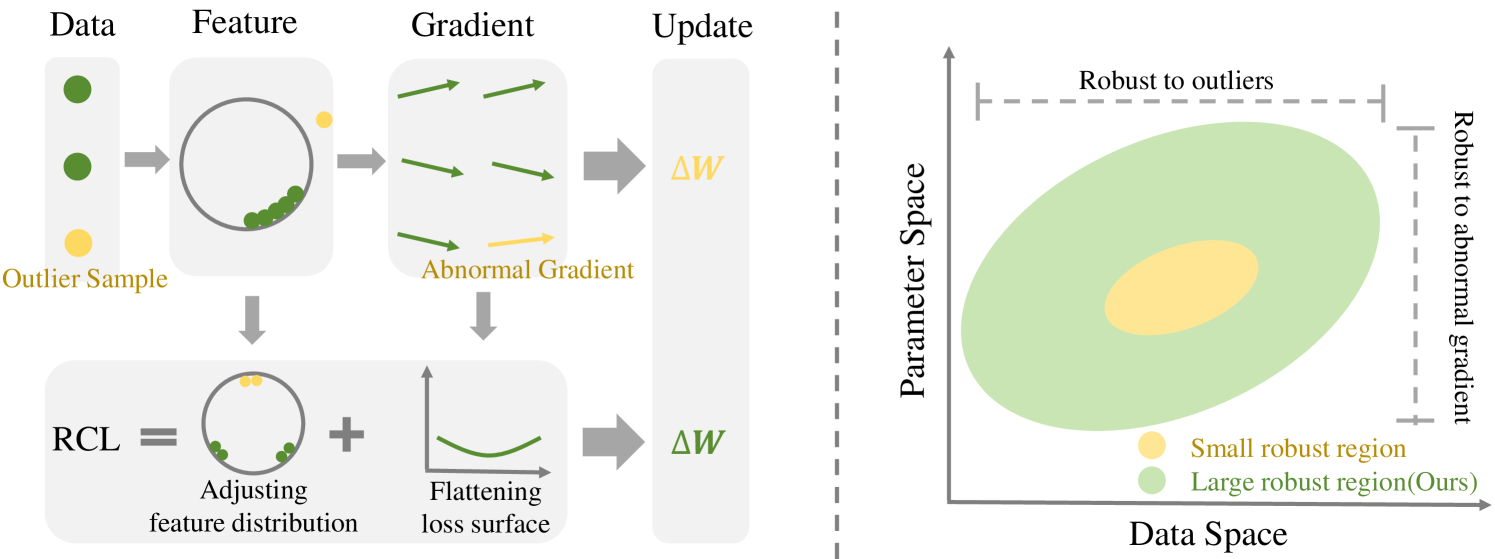
Improving Data-aware and Parameter-aware Robustness for Continual Learning
Hanxi Xiao, Fan Lyu
The goal of Continual Learning (CL) task is to continuously learn multiple new tasks sequentially while achieving a balance between the plasticity and stability of new and old knowledge. This paper analyzes that this insufficiency arises from the ineffective handling of outliers, leading to abnormal gradients and unexpected model updates. To address this issue, we enhance the data-aware and parameter-aware robustness of CL, proposing a Robust Continual Learning (RCL) method. From the data perspective, we develop a contrastive loss based on the concepts of uniformity and alignment, forming a feature distribution that is more applicable to outliers. From the parameter perspective, we present a forward strategy for worst-case perturbation and apply robust gradient projection to the parameters. The experimental results on three benchmarks show that the proposed method effectively maintains robustness and achieves new state-of-the-art (SOTA) results. The code is available at: https://github.com/HanxiXiao/RCL
Read more5/28/2024
0
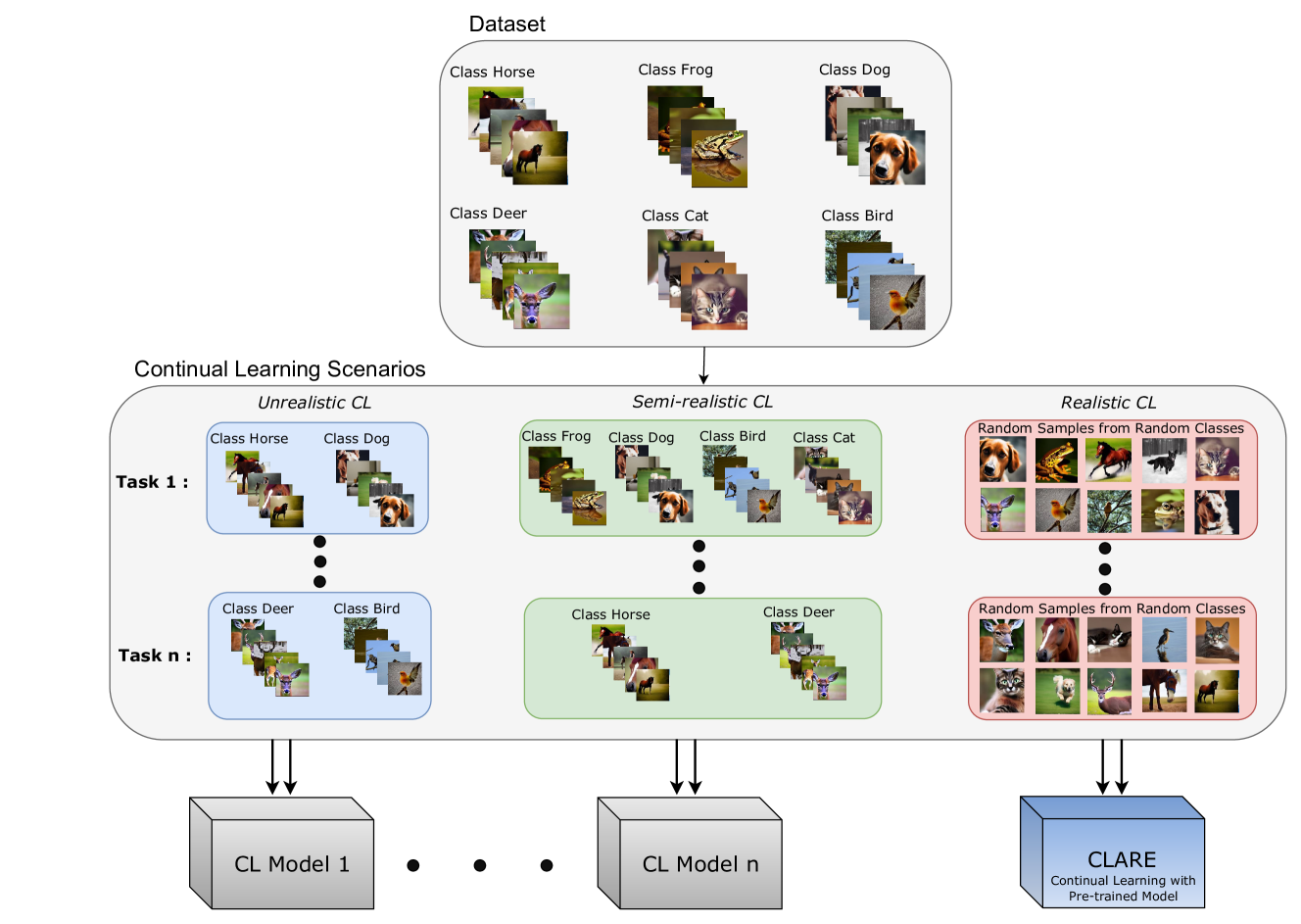
Realistic Continual Learning Approach using Pre-trained Models
Nadia Nasri, Carlos Guti'errez-'Alvarez, Sergio Lafuente-Arroyo, Saturnino Maldonado-Basc'on, Roberto J. L'opez-Sastre
Continual learning (CL) is crucial for evaluating adaptability in learning solutions to retain knowledge. Our research addresses the challenge of catastrophic forgetting, where models lose proficiency in previously learned tasks as they acquire new ones. While numerous solutions have been proposed, existing experimental setups often rely on idealized class-incremental learning scenarios. We introduce Realistic Continual Learning (RealCL), a novel CL paradigm where class distributions across tasks are random, departing from structured setups. We also present CLARE (Continual Learning Approach with pRE-trained models for RealCL scenarios), a pre-trained model-based solution designed to integrate new knowledge while preserving past learning. Our contributions include pioneering RealCL as a generalization of traditional CL setups, proposing CLARE as an adaptable approach for RealCL tasks, and conducting extensive experiments demonstrating its effectiveness across various RealCL scenarios. Notably, CLARE outperforms existing models on RealCL benchmarks, highlighting its versatility and robustness in unpredictable learning environments.
Read more4/12/2024