Continuity Preserving Online CenterLine Graph Learning

0

Sign in to get full access
Overview
- This paper presents a novel approach for continuously learning and updating a centerline graph representation of road networks in an online fashion.
- The proposed method, called Continuity Preserving Online CenterLine Graph Learning (CPOCGL), aims to maintain the geometric and topological continuity of the learned graph as new observations are incorporated.
- The research explores ways to enhance existing lane detection and road topology inference models by leveraging the unique properties of the centerline graph representation.
Plain English Explanation
The paper introduces a new technique for building and updating a digital map of road networks in real-time. This map represents the roads as a series of interconnected line segments, called a centerline graph. The key innovation is that as new sensor data is received, the graph is updated in a way that preserves the overall continuity and coherence of the road network.
Maintaining this continuity is important because it allows the system to better understand the spatial relationships between different road segments, even as the map is constantly evolving. This can be particularly useful for autonomous driving applications, where having an accurate and consistent representation of the road network is critical for safe and reliable navigation.
The method builds on previous work on lane detection and road topology inference, but introduces new strategies to ensure the learned graph remains geometrically and topologically consistent over time. By doing so, it aims to create a more robust and reliable representation of the road network that can adapt to changing conditions.
Technical Explanation
The Continuity Preserving Online CenterLine Graph Learning (CPOCGL) approach presented in this paper builds upon prior work on lane detection and road topology inference from sensor data. The key novelty is the introduction of techniques to maintain the geometric and topological continuity of the learned centerline graph representation as it is updated over time.
The method first extracts a set of candidate centerline segments from sensor data using existing lane detection algorithms. It then associates these segments into a graph structure, where nodes represent points along the centerlines and edges represent the connections between them. A key aspect is that the graph is initialized in an online fashion, rather than building it from scratch.
To preserve continuity as the graph is updated, the authors introduce several key innovations:
- A continuous optimization procedure that adjusts the node positions and edge connectivities to maintain global geometric and topological consistency.
- A selective edge addition/deletion strategy that avoids abrupt changes to the graph structure.
- A temporal smoothing mechanism that dampens sudden changes in the graph based on past observations.
Through extensive experiments on real-world driving data, the authors demonstrate that CPOCGL is able to learn accurate and stable centerline graph representations over time, outperforming baseline approaches that do not explicitly account for continuity. The technique also shows benefits for downstream tasks like lane-level localization and 3D lane detection.
Critical Analysis
The CPOCGL approach presents a compelling solution for maintaining a consistent and up-to-date representation of road networks, which is a critical requirement for many autonomous driving and navigation applications. The continuous optimization and selective update strategies appear to be effective at preserving the geometric and topological properties of the centerline graph as it evolves.
However, one potential limitation is the reliance on existing lane detection algorithms, which may not always be accurate or reliable, especially in challenging conditions. It would be interesting to see how the continuity preservation techniques could be extended to also handle uncertainties or errors in the initial lane detection outputs.
Additionally, the paper does not fully explore the potential trade-offs between maintaining continuity and rapidly adapting to significant changes in the road network, such as new construction or unexpected lane closures. Further research may be needed to understand how to strike the right balance in different operational scenarios.
Overall, the CPOCGL approach represents an important step forward in creating more robust and adaptable representations of road networks for autonomous systems. By focusing on preserving the underlying continuity of the road graph, it lays the groundwork for more reliable and consistent navigation and decision-making capabilities.
Conclusion
This paper presents a novel technique called Continuity Preserving Online CenterLine Graph Learning (CPOCGL) that aims to maintain the geometric and topological consistency of a learned road network representation as it is continuously updated from sensor data.
The key innovation is the introduction of specialized optimization and update strategies that preserve the coherence of the centerline graph structure, even as new observations are incorporated. This allows the system to build a more stable and reliable digital map of the road network over time, which can benefit a wide range of autonomous driving and navigation applications.
Through extensive experiments, the authors demonstrate the effectiveness of CPOCGL in learning accurate and continuous centerline graph representations. This work represents an important advancement in the field of real-time road network modeling, with the potential to enable more robust and adaptable autonomous systems in the future.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Continuity Preserving Online CenterLine Graph Learning
Yunhui Han, Kun Yu, Zhiwei Li
Lane topology, which is usually modeled by a centerline graph, is essential for high-level autonomous driving. For a high-quality graph, both topology connectivity and spatial continuity of centerline segments are critical. However, most of existing approaches pay more attention to connectivity while neglect the continuity. Such kind of centerline graph usually cause problem to planning of autonomous driving. To overcome this problem, we present an end-to-end network, CGNet, with three key modules: 1)Junction Aware Query Enhancement module, which provides positional prior to accurately predict junction points; 2)B'ezier Space Connection module, which enforces continuity constraints on any two topologically connected segments in a B'ezier space; 3) Iterative Topology Refinement module, which is a graph-based network with memory to iteratively refine the predicted topological connectivity. CGNet achieves state-of-the-art performance on both nuScenes and Argoverse2 datasets.
Read more7/17/2024
✅
0
Lane Graph as Path: Continuity-preserving Path-wise Modeling for Online Lane Graph Construction
Bencheng Liao, Shaoyu Chen, Bo Jiang, Tianheng Cheng, Qian Zhang, Wenyu Liu, Chang Huang, Xinggang Wang
Online lane graph construction is a promising but challenging task in autonomous driving. Previous methods usually model the lane graph at the pixel or piece level, and recover the lane graph by pixel-wise or piece-wise connection, which breaks down the continuity of the lane and results in suboptimal performance. Human drivers focus on and drive along the continuous and complete paths instead of considering lane pieces. Autonomous vehicles also require path-specific guidance from lane graph for trajectory planning. We argue that the path, which indicates the traffic flow, is the primitive of the lane graph. Motivated by this, we propose to model the lane graph in a novel path-wise manner, which well preserves the continuity of the lane and encodes traffic information for planning. We present a path-based online lane graph construction method, termed LaneGAP, which end-to-end learns the path and recovers the lane graph via a Path2Graph algorithm. We qualitatively and quantitatively demonstrate the superior accuracy and efficiency of LaneGAP over conventional pixel-based and piece-based methods on the challenging nuScenes and Argoverse2 datasets under controllable and fair conditions. Compared to the recent state-of-the-art piece-wise method TopoNet on the OpenLane-V2 dataset, LaneGAP still outperforms by 1.6 mIoU, further validating the effectiveness of path-wise modeling. Abundant visualizations in the supplementary material show LaneGAP can cope with diverse traffic conditions. Code is released at url{https://github.com/hustvl/LaneGAP}.
Read more8/16/2024
0
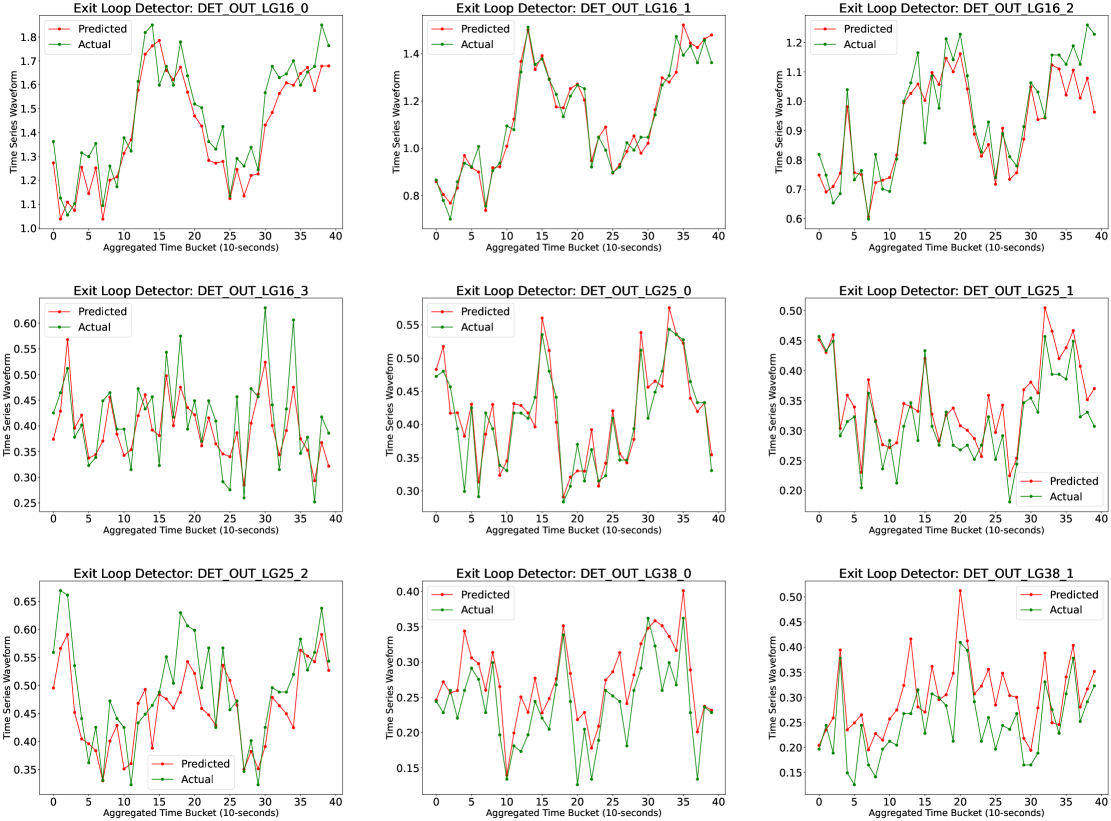
Graph Attention Network for Lane-Wise and Topology-Invariant Intersection Traffic Simulation
Nooshin Yousefzadeh, Rahul Sengupta, Yashaswi Karnati, Anand Rangarajan, Sanjay Ranka
Traffic congestion has significant economic, environmental, and social ramifications. Intersection traffic flow dynamics are influenced by numerous factors. While microscopic traffic simulators are valuable tools, they are computationally intensive and challenging to calibrate. Moreover, existing machine-learning approaches struggle to provide lane-specific waveforms or adapt to intersection topology and traffic patterns. In this study, we propose two efficient and accurate Digital Twin models for intersections, leveraging Graph Attention Neural Networks (GAT). These attentional graph auto-encoder digital twins capture temporal, spatial, and contextual aspects of traffic within intersections, incorporating various influential factors such as high-resolution loop detector waveforms, signal state records, driving behaviors, and turning-movement counts. Trained on diverse counterfactual scenarios across multiple intersections, our models generalize well, enabling the estimation of detailed traffic waveforms for any intersection approach and exit lanes. Multi-scale error metrics demonstrate that our models perform comparably to microsimulations. The primary application of our study lies in traffic signal optimization, a pivotal area in transportation systems research. These lightweight digital twins can seamlessly integrate into corridor and network signal timing optimization frameworks. Furthermore, our study's applications extend to lane reconfiguration, driving behavior analysis, and facilitating informed decisions regarding intersection safety and efficiency enhancements. A promising avenue for future research involves extending this approach to urban freeway corridors and integrating it with measures of effectiveness metrics.
Read more5/3/2024
0
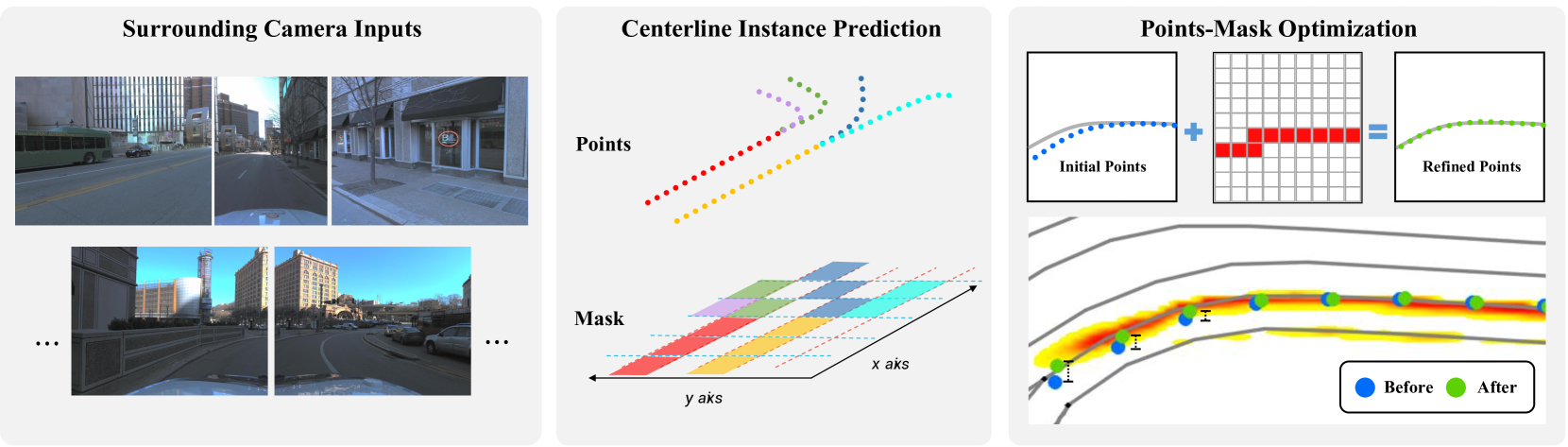
RoadPainter: Points Are Ideal Navigators for Topology transformER
Zhongxing Ma, Shuang Liang, Yongkun Wen, Weixin Lu, Guowei Wan
Topology reasoning aims to provide a precise understanding of road scenes, enabling autonomous systems to identify safe and efficient routes. In this paper, we present RoadPainter, an innovative approach for detecting and reasoning the topology of lane centerlines using multi-view images. The core concept behind RoadPainter is to extract a set of points from each centerline mask to improve the accuracy of centerline prediction. We start by implementing a transformer decoder that integrates a hybrid attention mechanism and a real-virtual separation strategy to predict coarse lane centerlines and establish topological associations. Then, we generate centerline instance masks guided by the centerline points from the transformer decoder. Moreover, we derive an additional set of points from each mask and combine them with previously detected centerline points for further refinement. Additionally, we introduce an optional module that incorporates a Standard Definition (SD) map to further optimize centerline detection and enhance topological reasoning performance. Experimental evaluations on the OpenLane-V2 dataset demonstrate the state-of-the-art performance of RoadPainter.
Read more7/23/2024