Lane Graph as Path: Continuity-preserving Path-wise Modeling for Online Lane Graph Construction

0
✅
Sign in to get full access
Overview
- Online lane graph construction is an important task for autonomous driving
- Previous methods model the lane graph at the pixel or piece level, which can lead to discontinuities and suboptimal performance
- The authors argue that the path, which indicates traffic flow, is the primitive of the lane graph
- They propose a novel path-wise approach called LaneGAP that learns the path and recovers the lane graph
Plain English Explanation
Autonomous vehicles need to understand the layout of roads and lanes in order to navigate safely and efficiently. Lane graph construction is the process of creating a digital representation of the lanes on a road. Previous methods have tried to model the lane graph by looking at individual pixels or short segments, but this can lead to problems where the continuity of the lanes is broken up.
The key insight in this paper is that the path - the continuous route that a vehicle would take - is the fundamental building block of the lane graph, not individual pixels or segments. Drivers instinctively focus on and follow these complete paths, and autonomous vehicles also need path-specific guidance for planning their trajectories.
The authors propose a new approach called LaneGAP that models the lane graph in a path-wise manner. LaneGAP learns to identify these continuous paths and then uses a Path2Graph algorithm to recover the full lane graph. This preserves the integrity of the lanes and also encodes valuable traffic information.
Technical Explanation
The key innovation in this work is the path-wise modeling of the lane graph, as opposed to the more common pixel-based or piece-wise approaches. The authors argue that the path, which represents the continuous traffic flow, is the fundamental primitive of the lane graph.
To implement this, they propose the LaneGAP method, which consists of two main components:
- Path Prediction: A neural network model that takes in sensor data (e.g. camera images) and predicts the continuous paths that vehicles would follow.
- Path2Graph: An algorithm that converts the predicted paths into a complete lane graph representation, preserving the connectivity and continuity of the lanes.
The authors evaluate LaneGAP on the challenging nuScenes and Argoverse2 datasets, and compare it to previous pixel-based and piece-wise methods. They show that LaneGAP achieves superior accuracy and efficiency, demonstrating the advantages of the path-wise modeling approach.
Critical Analysis
The authors make a compelling case for the path-wise modeling of lane graphs, arguing that this better captures the way humans and autonomous vehicles reason about and navigate roads. The comparative evaluation against state-of-the-art methods provides strong empirical support for the effectiveness of the LaneGAP approach.
That said, the paper does not address some potential limitations or areas for further research. For example, it's unclear how well LaneGAP would generalize to more complex, multi-lane road networks, or how it would handle unusual or edge cases that may not be well represented in the training data.
Additionally, the computational complexity and real-time performance of the LaneGAP pipeline is not thoroughly analyzed. For autonomous driving applications, these practical considerations are just as important as accuracy.
Conclusion
This paper presents a novel path-wise approach to online lane graph construction, a critical capability for autonomous vehicles. By modeling the lane graph in terms of continuous traffic paths rather than individual pixels or segments, the LaneGAP method is able to better preserve the integrity and connectivity of the lanes.
The strong empirical results demonstrate the advantages of this path-based perspective, suggesting that it may be a fruitful direction for further research and development in this area. As autonomous driving systems continue to advance, techniques like LaneGAP that can robustly and efficiently extract meaningful road structure information will become increasingly important.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
✅
0
Lane Graph as Path: Continuity-preserving Path-wise Modeling for Online Lane Graph Construction
Bencheng Liao, Shaoyu Chen, Bo Jiang, Tianheng Cheng, Qian Zhang, Wenyu Liu, Chang Huang, Xinggang Wang
Online lane graph construction is a promising but challenging task in autonomous driving. Previous methods usually model the lane graph at the pixel or piece level, and recover the lane graph by pixel-wise or piece-wise connection, which breaks down the continuity of the lane and results in suboptimal performance. Human drivers focus on and drive along the continuous and complete paths instead of considering lane pieces. Autonomous vehicles also require path-specific guidance from lane graph for trajectory planning. We argue that the path, which indicates the traffic flow, is the primitive of the lane graph. Motivated by this, we propose to model the lane graph in a novel path-wise manner, which well preserves the continuity of the lane and encodes traffic information for planning. We present a path-based online lane graph construction method, termed LaneGAP, which end-to-end learns the path and recovers the lane graph via a Path2Graph algorithm. We qualitatively and quantitatively demonstrate the superior accuracy and efficiency of LaneGAP over conventional pixel-based and piece-based methods on the challenging nuScenes and Argoverse2 datasets under controllable and fair conditions. Compared to the recent state-of-the-art piece-wise method TopoNet on the OpenLane-V2 dataset, LaneGAP still outperforms by 1.6 mIoU, further validating the effectiveness of path-wise modeling. Abundant visualizations in the supplementary material show LaneGAP can cope with diverse traffic conditions. Code is released at url{https://github.com/hustvl/LaneGAP}.
Read more8/16/2024

0
Continuity Preserving Online CenterLine Graph Learning
Yunhui Han, Kun Yu, Zhiwei Li
Lane topology, which is usually modeled by a centerline graph, is essential for high-level autonomous driving. For a high-quality graph, both topology connectivity and spatial continuity of centerline segments are critical. However, most of existing approaches pay more attention to connectivity while neglect the continuity. Such kind of centerline graph usually cause problem to planning of autonomous driving. To overcome this problem, we present an end-to-end network, CGNet, with three key modules: 1)Junction Aware Query Enhancement module, which provides positional prior to accurately predict junction points; 2)B'ezier Space Connection module, which enforces continuity constraints on any two topologically connected segments in a B'ezier space; 3) Iterative Topology Refinement module, which is a graph-based network with memory to iteratively refine the predicted topological connectivity. CGNet achieves state-of-the-art performance on both nuScenes and Argoverse2 datasets.
Read more7/17/2024
🌐
0
Lane Segmentation Refinement with Diffusion Models
Antonio Ruiz, Andrew Melnik, Dong Wang, Helge Ritter
The lane graph is a key component for building high-definition (HD) maps and crucial for downstream tasks such as autonomous driving or navigation planning. Previously, He et al. (2022) explored the extraction of the lane-level graph from aerial imagery utilizing a segmentation based approach. However, segmentation networks struggle to achieve perfect segmentation masks resulting in inaccurate lane graph extraction. We explore additional enhancements to refine this segmentation-based approach and extend it with a diffusion probabilistic model (DPM) component. This combination further improves the GEO F1 and TOPO F1 scores, which are crucial indicators of the quality of a lane graph, in the undirected graph in non-intersection areas. We conduct experiments on a publicly available dataset, demonstrating that our method outperforms the previous approach, particularly in enhancing the connectivity of such a graph, as measured by the TOPO F1 score. Moreover, we perform ablation studies on the individual components of our method to understand their contribution and evaluate their effectiveness.
Read more5/2/2024
0
Graph Attention Network for Lane-Wise and Topology-Invariant Intersection Traffic Simulation
Nooshin Yousefzadeh, Rahul Sengupta, Yashaswi Karnati, Anand Rangarajan, Sanjay Ranka
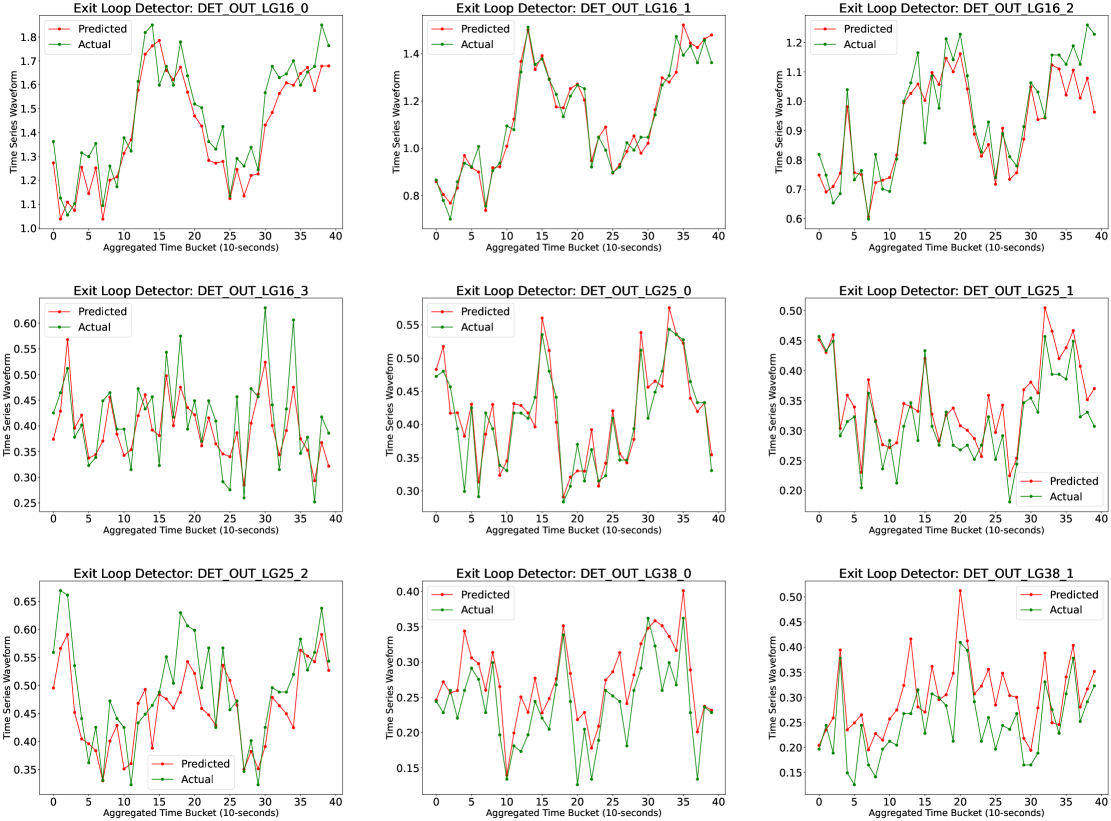
Traffic congestion has significant economic, environmental, and social ramifications. Intersection traffic flow dynamics are influenced by numerous factors. While microscopic traffic simulators are valuable tools, they are computationally intensive and challenging to calibrate. Moreover, existing machine-learning approaches struggle to provide lane-specific waveforms or adapt to intersection topology and traffic patterns. In this study, we propose two efficient and accurate Digital Twin models for intersections, leveraging Graph Attention Neural Networks (GAT). These attentional graph auto-encoder digital twins capture temporal, spatial, and contextual aspects of traffic within intersections, incorporating various influential factors such as high-resolution loop detector waveforms, signal state records, driving behaviors, and turning-movement counts. Trained on diverse counterfactual scenarios across multiple intersections, our models generalize well, enabling the estimation of detailed traffic waveforms for any intersection approach and exit lanes. Multi-scale error metrics demonstrate that our models perform comparably to microsimulations. The primary application of our study lies in traffic signal optimization, a pivotal area in transportation systems research. These lightweight digital twins can seamlessly integrate into corridor and network signal timing optimization frameworks. Furthermore, our study's applications extend to lane reconfiguration, driving behavior analysis, and facilitating informed decisions regarding intersection safety and efficiency enhancements. A promising avenue for future research involves extending this approach to urban freeway corridors and integrating it with measures of effectiveness metrics.
Read more5/3/2024