Rocket Landing Control with Grid Fins and Path-following using MPC
2405.16191
0
0

Abstract
In this project, we attempt to optimize a landing trajectory of a rocket. The goal is to minimize the total fuel consumption during the landing process using different techniques. Once the optimal and feasible trajectory is generated using batch approach, we attempt to follow the path using a Model Predictive Control (MPC) based algorithm, called Trajectory Optimizing Path following Estimation from Demonstration (TOPED), in order to generalize to similar initial states and models, where we introduce a novel cost function for the MPC to solve. We further show that TOPED can follow a demonstration trajectory well in practice under model mismatch and different initial states.
Create account to get full access
Problem Statement
The paper explores the problem of controlling the landing of a rocket using grid fins and a model predictive control (MPC) algorithm for path-following. Rockets often use grid fins, which are small movable control surfaces, to steer and stabilize the vehicle during flight and landing. The goal is to develop a control system that can precisely guide the rocket along a desired landing trajectory using the grid fins.
Related Work
The paper builds upon previous research in the field of rocket control systems. It cites related works that have used MPC for spacecraft proximity maneuvers, trajectory generation for autonomous aerial vehicles, and efficient embedded MPC. The authors also reference studies on convex MPC for thrust allocation and deadband control and learning-based planning for efficient navigation.
Plain English Explanation
The paper presents a control system for landing a rocket using grid fins and a model predictive control (MPC) algorithm. Grid fins are small, movable control surfaces on the rocket that can be used to steer and stabilize the vehicle during flight and landing.
The key idea is to use the MPC algorithm to precisely guide the rocket along a desired landing trajectory by adjusting the grid fins. MPC is a control technique that predicts the future behavior of a system and optimizes the control inputs to achieve a desired outcome.
In this case, the MPC algorithm calculates the optimal grid fin movements needed to keep the rocket on the target landing path. This allows the rocket to make precise adjustments during the landing process, improving the accuracy and stability of the touchdown.
The authors build upon previous research on using MPC for spacecraft control, aerial vehicle navigation, and efficient embedded control systems. They aim to develop a robust and reliable control system that can safely land rockets using the grid fin actuation.
Technical Explanation
The paper presents a model predictive control (MPC) algorithm for guiding a rocket during its landing phase using grid fins. The authors develop a detailed dynamic model of the rocket that incorporates the aerodynamic effects of the grid fins, as well as the rocket's thrust, mass, and other relevant parameters.
They then formulate an MPC optimization problem that seeks to minimize the deviation of the rocket's trajectory from a desired landing path. The MPC controller calculates the optimal grid fin deflections at each time step to keep the rocket on the target trajectory.
The paper includes simulation results that demonstrate the effectiveness of the proposed approach. The authors show that the MPC-based control system is able to accurately track the desired landing path and successfully land the rocket, even in the presence of disturbances and uncertainties.
Critical Analysis
The paper provides a well-designed and thoroughly tested control system for rocket landing using grid fins and MPC. The authors have carefully considered the relevant dynamics and constraints of the problem and developed a robust optimization-based control strategy.
One potential limitation is the reliance on an accurate dynamic model of the rocket and its aerodynamics. In practice, there may be uncertainties or unmodeled effects that could challenge the performance of the MPC controller. The authors acknowledge this and suggest that future work could explore adaptive or learning-based approaches to address model inaccuracies.
Additionally, the paper focuses on simulation results and does not provide experimental validation of the proposed control system. Actual implementation on a physical rocket system may present additional challenges that were not captured in the simulations.
Overall, the research presented in the paper represents a significant contribution to the field of rocket control systems and demonstrates the potential of MPC techniques for precise landing maneuvers. Further development and real-world testing would be valuable to fully validate the practicality and robustness of the proposed approach.
Conclusion
This paper addresses the problem of controlling the landing of a rocket using grid fins and a model predictive control (MPC) algorithm. The authors develop a detailed dynamic model of the rocket and formulate an MPC optimization problem to guide the vehicle along a desired landing trajectory.
The simulations show that the proposed MPC-based control system can accurately track the target landing path and successfully land the rocket, even in the presence of disturbances. This work represents a significant contribution to the field of rocket control systems and demonstrates the potential of MPC techniques for precise landing maneuvers.
While the paper provides a well-designed control system, further research and real-world testing would be valuable to fully validate the practicality and robustness of the approach, particularly in addressing model uncertainties and other practical challenges.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers

Embedded Hierarchical MPC for Autonomous Navigation
Dennis Benders, Johannes Kohler, Thijs Niesten, Robert Babuv{s}ka, Javier Alonso-Mora, Laura Ferranti
0
0
To efficiently deploy robotic systems in society, mobile robots need to autonomously and safely move through complex environments. Nonlinear model predictive control (MPC) methods provide a natural way to find a dynamically feasible trajectory through the environment without colliding with nearby obstacles. However, the limited computation power available on typical embedded robotic systems, such as quadrotors, poses a challenge to running MPC in real-time, including its most expensive tasks: constraints generation and optimization. To address this problem, we propose a novel hierarchical MPC scheme that interconnects a planning and a tracking layer. The planner constructs a trajectory with a long prediction horizon at a slow rate, while the tracker ensures trajectory tracking at a relatively fast rate. We prove that the proposed framework avoids collisions and is recursively feasible. Furthermore, we demonstrate its effectiveness in simulations and lab experiments with a quadrotor that needs to reach a goal position in a complex static environment. The code is efficiently implemented on the quadrotor's embedded computer to ensure real-time feasibility. Compared to a state-of-the-art single-layer MPC formulation, this allows us to increase the planning horizon by a factor of 5, which results in significantly better performance.
6/18/2024
Convex MPC and Thrust Allocation with Deadband for Spacecraft Rendezvous
Pedro Taborda, Hugo Matias, Daniel Silvestre, Pedro Lourenc{c}o
0
0
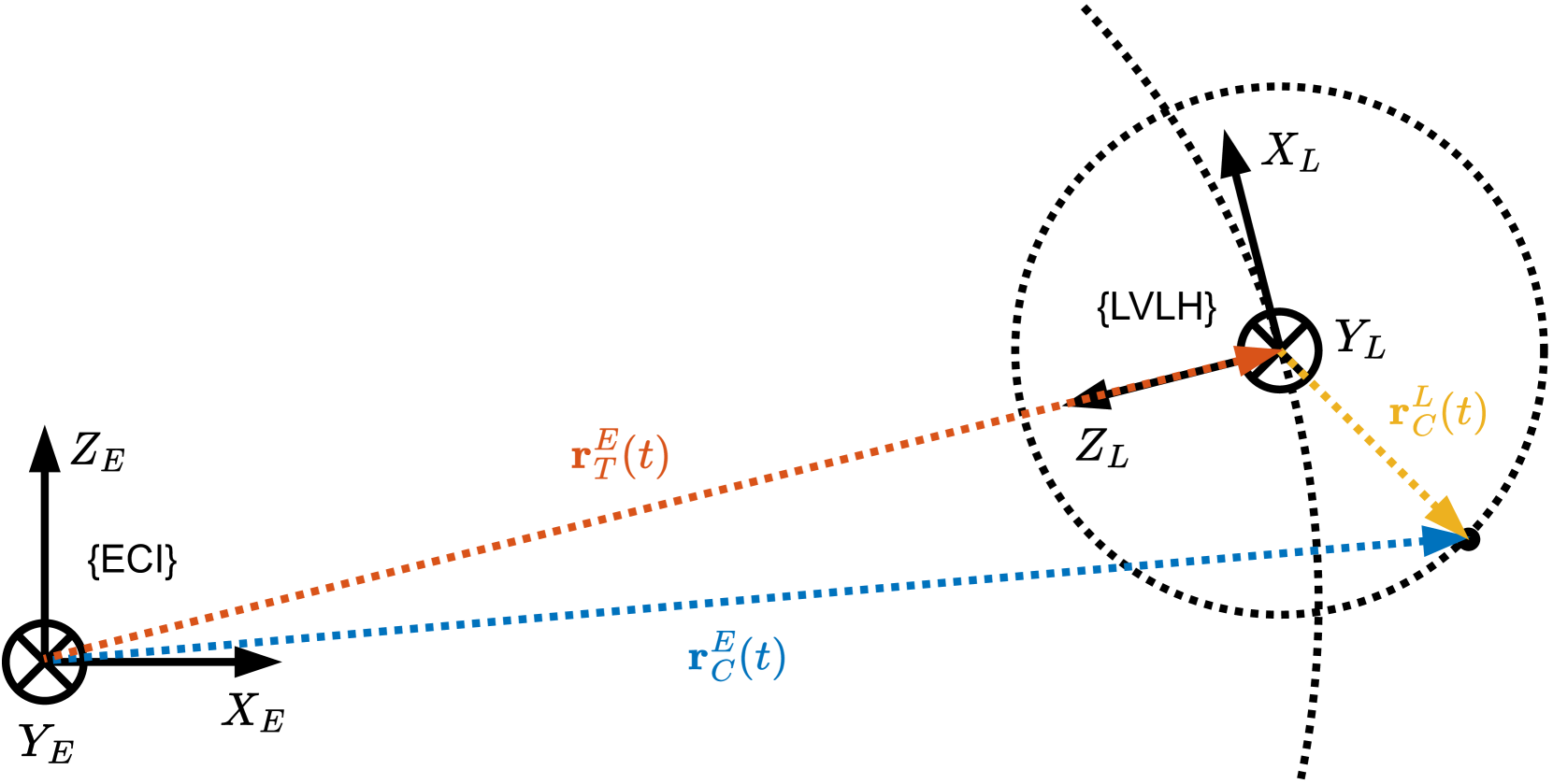
This paper delves into a rendezvous scenario involving a chaser and a target spacecraft, focusing on the application of Model Predictive Control (MPC) to design a controller capable of guiding the chaser toward the target. The operational principle of spacecraft thrusters, requiring a minimum activation time that leads to the existence of a control deadband, introduces mixed-integer constraints into the optimization, posing a considerable computational challenge due to the exponential complexity on the number of integer constraints. We address this complexity by presenting two solver algorithms that efficiently approximate the optimal solution in significantly less time than standard solvers, making them well-suited for real-time applications.
6/26/2024

MPCC++: Model Predictive Contouring Control for Time-Optimal Flight with Safety Constraints
Maria Krinner, Angel Romero, Leonard Bauersfeld, Melanie Zeilinger, Andrea Carron, Davide Scaramuzza
0
0
Quadrotor flight is an extremely challenging problem due to the limited control authority encountered at the limit of handling. Model Predictive Contouring Control (MPCC) has emerged as a promising model-based approach for time optimization problems such as drone racing. However, the standard MPCC formulation used in quadrotor racing introduces the notion of the gates directly in the cost function, creating a multi objective optimization that continuously trades off between maximizing progress and tracking the path accurately. This paper introduces three key components that enhance the state-of-the-art MPCC approach for drone racing. First and foremost, we provide safety guarantees in the form of a track constraint and terminal set. The track constraint is designed as a spatial constraint which prevents gate collisions while allowing for time optimization only in the cost function. Second, we augment the existing first principles dynamics with a residual term that captures complex aerodynamic effects and thrust forces learned directly from real-world data. Third, we use Trust Region Bayesian Optimization (TuRBO), a state-of-the-art global Bayesian Optimization algorithm, to tune the hyperparameters of the MPCC controller given a sparse reward based on lap time minimization. The proposed approach achieves similar lap times to the best-performing RL policy and outperforms the best model-based controller while satisfying constraints. In both simulation and real world, our approach consistently prevents gate crashes with 100% success rate, while pushing the quadrotor to its physical limits reaching speeds of more than 80km/h.
6/17/2024
🧠
PlanNetX: Learning an Efficient Neural Network Planner from MPC for Longitudinal Control
Jasper Hoffmann, Diego Fernandez, Julien Brosseit, Julian Bernhard, Klemens Esterle, Moritz Werling, Michael Karg, Joschka Boedecker
0
0
Model predictive control (MPC) is a powerful, optimization-based approach for controlling dynamical systems. However, the computational complexity of online optimization can be problematic on embedded devices. Especially, when we need to guarantee fixed control frequencies. Thus, previous work proposed to reduce the computational burden using imitation learning (IL) approximating the MPC policy by a neural network. In this work, we instead learn the whole planned trajectory of the MPC. We introduce a combination of a novel neural network architecture PlanNetX and a simple loss function based on the state trajectory that leverages the parameterized optimal control structure of the MPC. We validate our approach in the context of autonomous driving by learning a longitudinal planner and benchmarking it extensively in the CommonRoad simulator using synthetic scenarios and scenarios derived from real data. Our experimental results show that we can learn the open-loop MPC trajectory with high accuracy while improving the closed-loop performance of the learned control policy over other baselines like behavior cloning.
5/24/2024