Cross Dataset Analysis and Network Architecture Repair for Autonomous Car Lane Detection

0
Sign in to get full access
Overview
- Advanced vehicle technologies like autonomous car lane detection are important for safety and efficiency.
- This research focuses on cross dataset analysis and network architecture repair to improve lane detection performance.
- The work was funded by a grant from NASA and received feedback from Natasha Neogi of NASA Langley Research Center.
Plain English Explanation
Autonomous cars rely on advanced computer vision and machine learning algorithms to detect the lanes on the road. This allows the car to stay centered in its lane and make safe maneuvers. However, training these lane detection models can be challenging, as they need to work reliably across different driving environments, road conditions, and camera setups.
The researchers in this paper tackled two key issues to improve autonomous car lane detection:
-
Cross-Dataset Analysis: They evaluated how well the lane detection models performed when tested on different datasets, beyond just the data they were trained on. This "cross-dataset" testing helps identify weaknesses or biases in the models.
-
Network Architecture Repair: Based on the cross-dataset analysis, the researchers then modified the underlying neural network architectures to improve their robustness and generalization to new driving scenarios. This "architecture repair" process aims to make the models more reliable and adaptable.
By addressing these challenges, the researchers hope to develop lane detection systems that work more consistently and safely in the real world, beyond just the limited test environments. This is an important step towards making autonomous vehicles a practical reality.
Technical Explanation
The paper presents a two-stage approach to improving autonomous car lane detection:
-
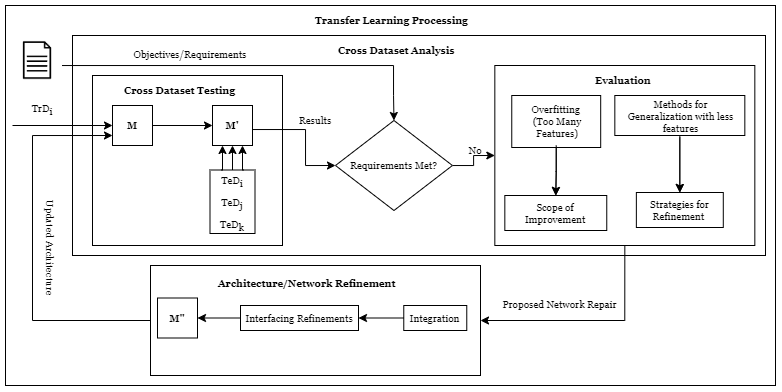
Cross-Dataset Analysis: The researchers evaluated the performance of existing lane detection neural network models on multiple datasets, not just the ones used for training. This "cross-dataset" evaluation revealed significant performance drops when the models were tested on data from different sources or driving conditions compared to the original training data.
-
Network Architecture Repair: Based on the insights from the cross-dataset analysis, the researchers then modified the underlying neural network architectures to improve their robustness and generalization. This "architecture repair" process involved adjusting the model complexity, skip connections, and other architectural choices to make the lane detection more reliable across diverse datasets.
The cross-dataset analysis and network architecture repair were performed iteratively, with the goal of developing lane detection models that maintain high performance regardless of the specific driving environment or camera setup. The researchers evaluated their approach on several popular lane detection datasets, demonstrating significant improvements in model generalization and real-world applicability.
Critical Analysis
The paper provides a thorough and thoughtful approach to improving the cross-dataset performance of autonomous car lane detection models. The cross-dataset analysis is a valuable technique for uncovering potential weaknesses or biases in these AI systems, beyond just evaluating them on the data they were trained on.
However, the paper does not delve deeply into the specific architectural changes made during the "repair" process, nor does it provide a comprehensive analysis of the performance tradeoffs involved. Additionally, the paper does not address other potential challenges, such as the difficulty of acquiring diverse real-world training data or the computational costs of more complex neural network architectures.
Further research could explore more sophisticated methods for automatically optimizing the network architecture based on the cross-dataset performance, potentially using techniques like neural architecture search. Investigating the transferability of the "repaired" models to entirely new datasets or driving scenarios would also be an interesting avenue for future work.
Conclusion
This research demonstrates the importance of comprehensive testing and iterative model refinement for developing robust and reliable autonomous car lane detection systems. By combining cross-dataset analysis and network architecture repair, the researchers have shown a path towards creating lane detection AI that can adapt to a wide range of real-world driving conditions, a crucial step towards the widespread adoption of self-driving technology.
The findings in this paper have implications beyond just lane detection, as they highlight the need for thorough testing and architectural optimization for many AI-powered autonomous systems. As these technologies become more prevalent, ensuring their robust and trustworthy performance across diverse environments will be essential for realizing their full potential benefits to society.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Cross Dataset Analysis and Network Architecture Repair for Autonomous Car Lane Detection
Parth Ganeriwala, Siddhartha Bhattacharyya, Raja Muthalagu
Transfer Learning has become one of the standard methods to solve problems to overcome the isolated learning paradigm by utilizing knowledge acquired for one task to solve another related one. However, research needs to be done, to identify the initial steps before inducing transfer learning to applications for further verification and explainablity. In this research, we have performed cross dataset analysis and network architecture repair for the lane detection application in autonomous vehicles. Lane detection is an important aspect of autonomous vehicles driving assistance system. In most circumstances, modern deep-learning-based lane recognition systems are successful, but they struggle with lanes with complex topologies. The proposed architecture, ERFCondLaneNet is an enhancement to the CondlaneNet used for lane identification framework to solve the difficulty of detecting lane lines with complex topologies like dense, curved and fork lines. The newly proposed technique was tested on two common lane detecting benchmarks, CULane and CurveLanes respectively, and two different backbones, ResNet and ERFNet. The researched technique with ERFCondLaneNet, exhibited similar performance in comparison to ResnetCondLaneNet, while using 33% less features, resulting in a reduction of model size by 46%.
Read more9/27/2024
0
LaneSegNet Design Study
William Stevens, Vishal Urs, Karthik Selvaraj, Gabriel Torres, Gaurish Lakhanpal
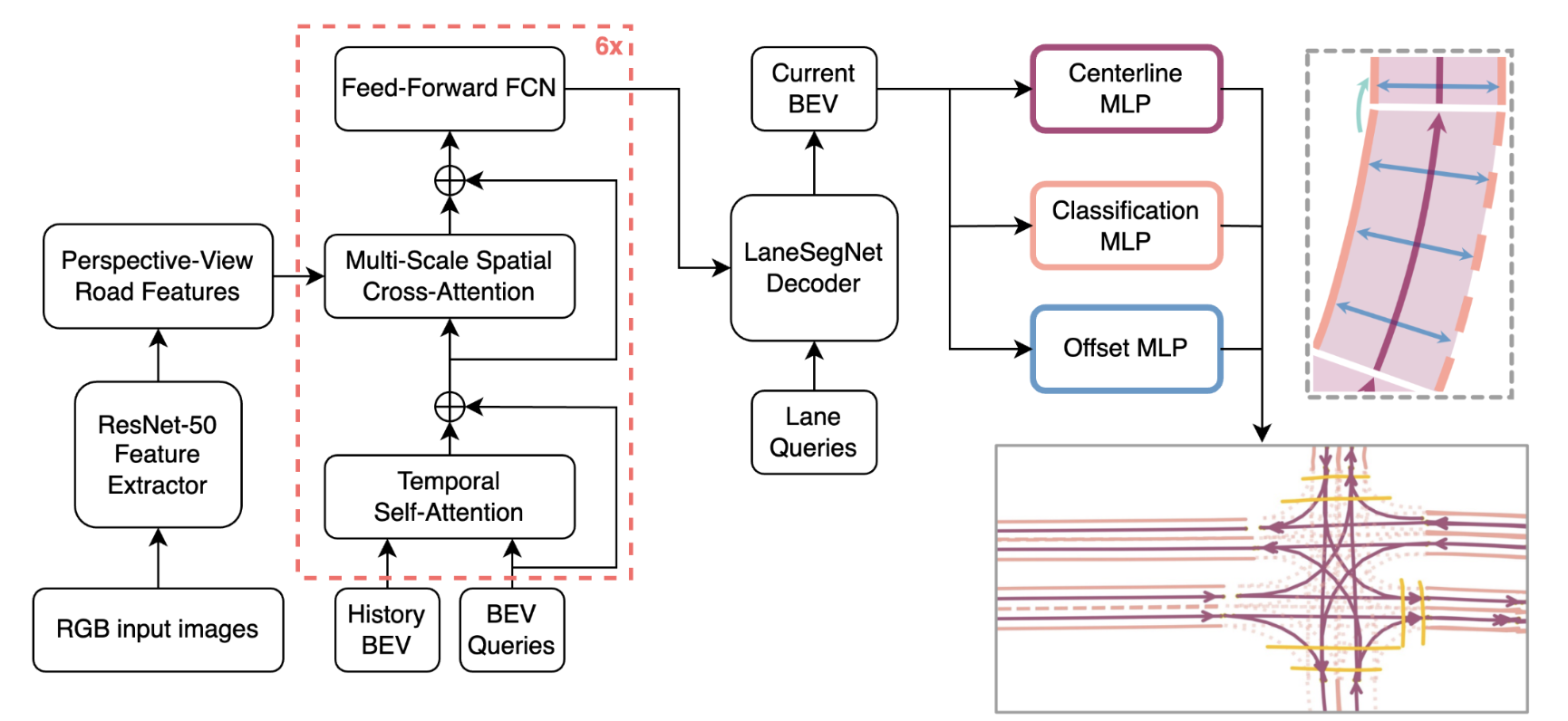
With the increasing prevalence of autonomous vehicles, it is essential for computer vision algorithms to accurately assess road features in real-time. This study explores the LaneSegNet architecture, a new approach to lane topology prediction which integrates topological information with lane-line data to provide a more contextual understanding of road environments. The LaneSegNet architecture includes a feature extractor, lane encoder, lane decoder, and prediction head, leveraging components from ResNet-50, BEVFormer, and various attention mechanisms. We experimented with optimizations to the LaneSegNet architecture through feature extractor modification and transformer encoder-decoder stack modification. We found that modifying the encoder and decoder stacks offered an interesting tradeoff between training time and prediction accuracy, with certain combinations showing promising results. Our implementation, trained on a single NVIDIA Tesla A100 GPU, found that a 2:4 ratio reduced training time by 22.3% with only a 7.1% drop in mean average precision, while a 4:8 ratio increased training time by only 11.1% but improved mean average precision by a significant 23.7%. These results indicate that strategic hyperparameter tuning can yield substantial improvements depending on the resources of the user. This study provides valuable insights for optimizing LaneSegNet according to available computation power, making it more accessible for users with limited resources and increasing the capabilities for users with more powerful resources.
Read more8/1/2024

0
ENet-21: An Optimized light CNN Structure for Lane Detection
Seyed Rasoul Hosseini, Hamid Taheri, Mohammad Teshnehlab
Lane detection for autonomous vehicles is an important concept, yet it is a challenging issue of driver assistance systems in modern vehicles. The emergence of deep learning leads to significant progress in self-driving cars. Conventional deep learning-based methods handle lane detection problems as a binary segmentation task and determine whether a pixel belongs to a line. These methods rely on the assumption of a fixed number of lanes, which does not always work. This study aims to develop an optimal structure for the lane detection problem, offering a promising solution for driver assistance features in modern vehicles by utilizing a machine learning method consisting of binary segmentation and Affinity Fields that can manage varying numbers of lanes and lane change scenarios. In this approach, the Convolutional Neural Network (CNN), is selected as a feature extractor, and the final output is obtained through clustering of the semantic segmentation and Affinity Field outputs. Our method uses less complex CNN architecture than existing ones. Experiments on the TuSimple dataset support the effectiveness of the proposed method.
Read more8/9/2024

0
Learning Lane Graphs from Aerial Imagery Using Transformers
Martin Buchner, Simon Dorer, Abhinav Valada
The robust and safe operation of automated vehicles underscores the critical need for detailed and accurate topological maps. At the heart of this requirement is the construction of lane graphs, which provide essential information on lane connectivity, vital for navigating complex urban environments autonomously. While transformer-based models have been effective in creating map topologies from vehicle-mounted sensor data, their potential for generating such graphs from aerial imagery remains untapped. This work introduces a novel approach to generating successor lane graphs from aerial imagery, utilizing the advanced capabilities of transformer models. We frame successor lane graphs as a collection of maximal length paths and predict them using a Detection Transformer (DETR) architecture. We demonstrate the efficacy of our method through extensive experiments on the diverse and large-scale UrbanLaneGraph dataset, illustrating its accuracy in generating successor lane graphs and highlighting its potential for enhancing autonomous vehicle navigation in complex environments.
Read more7/9/2024