Deep Attention Driven Reinforcement Learning (DAD-RL) for Autonomous Vehicle Decision-Making in Dynamic Environment

0

Sign in to get full access
Overview
- This paper proposes a Deep Attention Driven Reinforcement Learning (DAD-RL) approach for autonomous vehicle decision-making in dynamic environments.
- The key idea is to use attention mechanisms to focus the reinforcement learning agent on the most relevant parts of the observed environment, improving its decision-making capabilities.
- The approach is evaluated on a simulated autonomous driving task, demonstrating improved performance compared to baseline reinforcement learning methods.
Plain English Explanation
The paper presents a new way for self-driving cars to make decisions in complex, changing environments. Traditional reinforcement learning approaches for autonomous driving can struggle to quickly identify the most important information to focus on when making decisions.
The DAD-RL approach aims to address this by using attention mechanisms. Attention allows the AI system to automatically determine which parts of the surrounding environment are most relevant for a given decision, and focus on those areas. This helps the system make better choices about how to navigate safely and efficiently.
The authors test their approach in a simulation of autonomous driving, and find that it outperforms standard reinforcement learning methods. This suggests attention-based techniques could be a promising direction for improving the decision-making capabilities of self-driving cars, particularly in unpredictable, dynamic environments.
Technical Explanation
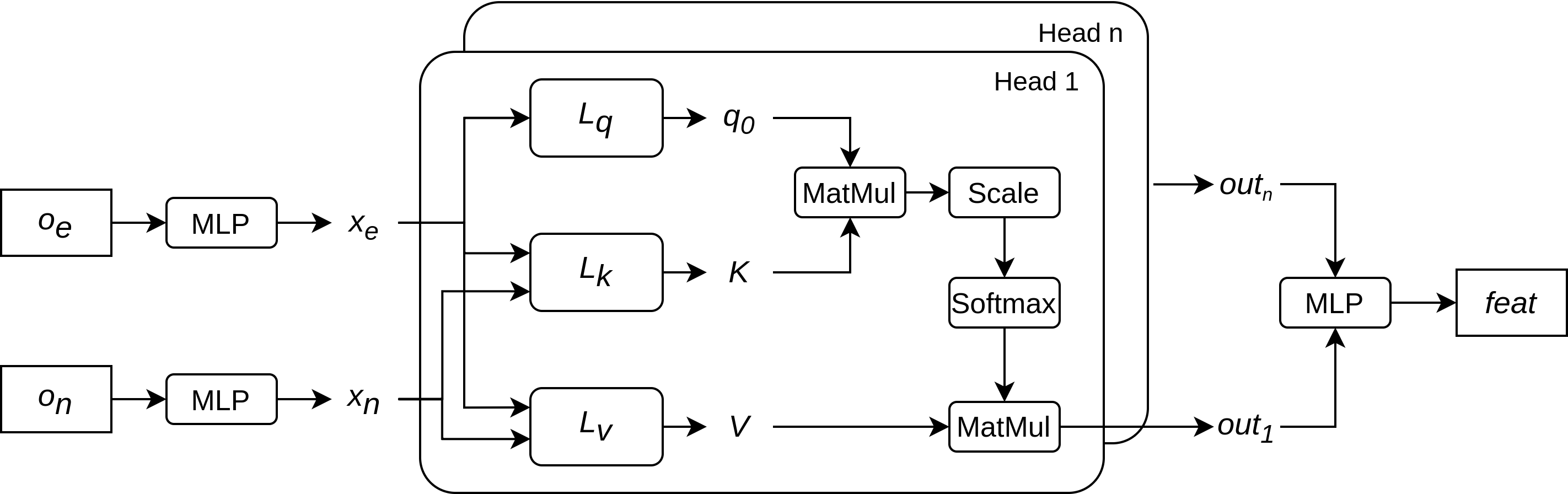
The DAD-RL approach works by integrating attention mechanisms into a deep reinforcement learning architecture for autonomous vehicle control. The attention module learns to focus the agent's observations on the most relevant aspects of the environment, such as nearby obstacles or traffic signals, to improve its decision-making.
This is achieved by having the attention module produce a set of attention weights that are applied to the agent's sensory inputs before they are processed by the reinforcement learning policy network. The policy network then uses this "attended" representation of the environment to select actions.
The attention weights are trained jointly with the reinforcement learning policy, allowing the system to learn which environmental factors are most important for making safe and effective driving decisions in different situations.
The authors evaluate their approach on a simulated autonomous driving task, where the DAD-RL agent must navigate through a dynamic environment with other vehicles, pedestrians, and obstacles. They find that the attention-based agent outperforms standard deep reinforcement learning baselines in terms of metrics like distance traveled, collision avoidance, and driving efficiency.
Critical Analysis
The DAD-RL approach represents a promising step towards improving the decision-making capabilities of autonomous vehicles, particularly in complex, dynamic environments. The use of attention mechanisms is a clever way to help the reinforcement learning agent focus on the most relevant information when making driving decisions.
However, the paper does not address several important limitations and caveats. For example, the evaluation is limited to a simulated environment, and it's unclear how well the attention-based approach would generalize to real-world driving scenarios with all their unpredictability and noise.
Additionally, the authors do not provide much insight into the internal workings of the attention mechanism, or how it learns to prioritize different environmental factors. A more detailed analysis of the attention patterns could yield additional insights and help explain the performance improvements.
Further research is also needed to understand how DAD-RL would perform in more diverse and challenging driving situations, and how it compares to other state-of-the-art techniques for autonomous vehicle control. Rigorous testing on real-world driving data would be a valuable next step.
Conclusion
The DAD-RL approach presented in this paper represents an interesting step forward in using attention mechanisms to improve the decision-making capabilities of autonomous vehicles in dynamic environments. By focusing the reinforcement learning agent on the most relevant aspects of its observations, the approach can outperform standard techniques.
While the results are promising, further research is needed to fully understand the approach's limitations and potential real-world applications. Expanding the evaluation to more diverse and challenging scenarios, as well as analyzing the inner workings of the attention mechanism, could yield valuable insights for the development of robust and reliable self-driving systems.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Deep Attention Driven Reinforcement Learning (DAD-RL) for Autonomous Vehicle Decision-Making in Dynamic Environment
Jayabrata Chowdhury, Venkataramanan Shivaraman, Sumit Dangi, Suresh Sundaram, P. B. Sujit
Autonomous Vehicle (AV) decision making in urban environments is inherently challenging due to the dynamic interactions with surrounding vehicles. For safe planning, AV must understand the weightage of various spatiotemporal interactions in a scene. Contemporary works use colossal transformer architectures to encode interactions mainly for trajectory prediction, resulting in increased computational complexity. To address this issue without compromising spatiotemporal understanding and performance, we propose the simple Deep Attention Driven Reinforcement Learning (DADRL) framework, which dynamically assigns and incorporates the significance of surrounding vehicles into the ego's RL driven decision making process. We introduce an AV centric spatiotemporal attention encoding (STAE) mechanism for learning the dynamic interactions with different surrounding vehicles. To understand map and route context, we employ a context encoder to extract features from context maps. The spatiotemporal representations combined with contextual encoding provide a comprehensive state representation. The resulting model is trained using the Soft Actor Critic (SAC) algorithm. We evaluate the proposed framework on the SMARTS urban benchmarking scenarios without traffic signals to demonstrate that DADRL outperforms recent state of the art methods. Furthermore, an ablation study underscores the importance of the context-encoder and spatio temporal attention encoder in achieving superior performance.
Read more7/15/2024
0
Demystifying the Physics of Deep Reinforcement Learning-Based Autonomous Vehicle Decision-Making
Hanxi Wan, Pei Li, Arpan Kusari
With the advent of universal function approximators in the domain of reinforcement learning, the number of practical applications leveraging deep reinforcement learning (DRL) has exploded. Decision-making in autonomous vehicles (AVs) has emerged as a chief application among them, taking the sensor data or the higher-order kinematic variables as the input and providing a discrete choice or continuous control output. There has been a continuous effort to understand the black-box nature of the DRL models, but so far, there hasn't been any discussion (to the best of authors' knowledge) about how the models learn the physical process. This presents an overwhelming limitation that restricts the real-world deployment of DRL in AVs. Therefore, in this research work, we try to decode the knowledge learnt by the attention-based DRL framework about the physical process. We use a continuous proximal policy optimization-based DRL algorithm as the baseline model and add a multi-head attention framework in an open-source AV simulation environment. We provide some analytical techniques for discussing the interpretability of the trained models in terms of explainability and causality for spatial and temporal correlations. We show that the weights in the first head encode the positions of the neighboring vehicles while the second head focuses on the leader vehicle exclusively. Also, the ego vehicle's action is causally dependent on the vehicles in the target lane spatially and temporally. Through these findings, we reliably show that these techniques can help practitioners decipher the results of the DRL algorithms.
Read more6/14/2024

0
Decentralized Semantic Traffic Control in AVs Using RL and DQN for Dynamic Roadblocks
Emanuel Figetakis, Yahuza Bello, Ahmed Refaey, Abdallah Shami
Autonomous Vehicles (AVs), furnished with sensors capable of capturing essential vehicle dynamics such as speed, acceleration, and precise location, possess the capacity to execute intelligent maneuvers, including lane changes, in anticipation of approaching roadblocks. Nevertheless, the sheer volume of sensory data and the processing necessary to derive informed decisions can often overwhelm the vehicles, rendering them unable to handle the task independently. Consequently, a common approach in traffic scenarios involves transmitting the data to servers for processing, a practice that introduces challenges, particularly in situations demanding real-time processing. In response to this challenge, we present a novel DL-based semantic traffic control system that entrusts semantic encoding responsibilities to the vehicles themselves. This system processes driving decisions obtained from a Reinforcement Learning (RL) agent, streamlining the decision-making process. Specifically, our framework envisions scenarios where abrupt roadblocks materialize due to factors such as road maintenance, accidents, or vehicle repairs, necessitating vehicles to make determinations concerning lane-keeping or lane-changing actions to navigate past these obstacles. To formulate this scenario mathematically, we employ a Markov Decision Process (MDP) and harness the Deep Q Learning (DQN) algorithm to unearth viable solutions.
Read more6/28/2024
0
Adaptive Autopilot: Constrained DRL for Diverse Driving Behaviors
Dinesh Cyril Selvaraj, Christian Vitale, Tania Panayiotou, Panayiotis Kolios, Carla Fabiana Chiasserini, Georgios Ellinas
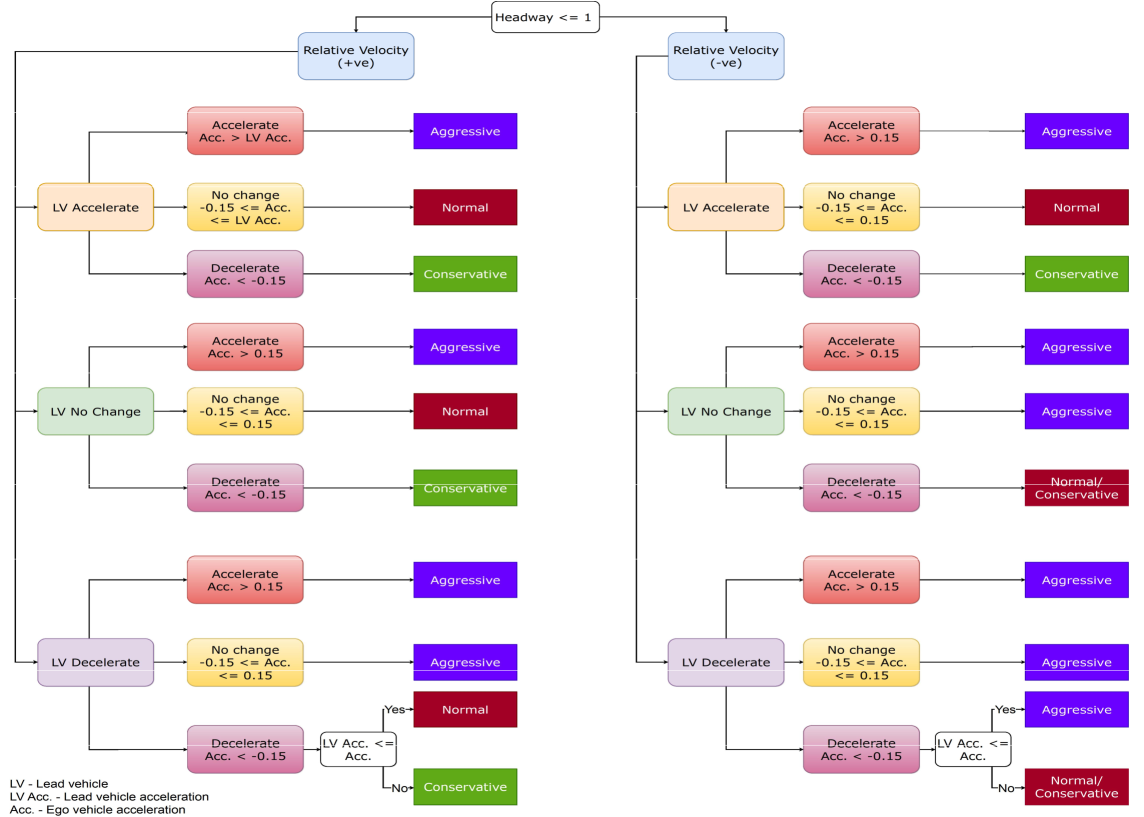
In pursuit of autonomous vehicles, achieving human-like driving behavior is vital. This study introduces adaptive autopilot (AA), a unique framework utilizing constrained-deep reinforcement learning (C-DRL). AA aims to safely emulate human driving to reduce the necessity for driver intervention. Focusing on the car-following scenario, the process involves (i) extracting data from the highD natural driving study and categorizing it into three driving styles using a rule-based classifier; (ii) employing deep neural network (DNN) regressors to predict human-like acceleration across styles; and (iii) using C-DRL, specifically the soft actor-critic Lagrangian technique, to learn human-like safe driving policies. Results indicate effectiveness in each step, with the rule-based classifier distinguishing driving styles, the regressor model accurately predicting acceleration, outperforming traditional car-following models, and C-DRL agents learning optimal policies for humanlike driving across styles.
Read more7/4/2024