Depth Estimation using Weighted-loss and Transfer Learning
2404.07686
0
0
Abstract
Depth estimation from 2D images is a common computer vision task that has applications in many fields including autonomous vehicles, scene understanding and robotics. The accuracy of a supervised depth estimation method mainly relies on the chosen loss function, the model architecture, quality of data and performance metrics. In this study, we propose a simplified and adaptable approach to improve depth estimation accuracy using transfer learning and an optimized loss function. The optimized loss function is a combination of weighted losses to which enhance robustness and generalization: Mean Absolute Error (MAE), Edge Loss and Structural Similarity Index (SSIM). We use a grid search and a random search method to find optimized weights for the losses, which leads to an improved model. We explore multiple encoder-decoder-based models including DenseNet121, DenseNet169, DenseNet201, and EfficientNet for the supervised depth estimation model on NYU Depth Dataset v2. We observe that the EfficientNet model, pre-trained on ImageNet for classification when used as an encoder, with a simple upsampling decoder, gives the best results in terms of RSME, REL and log10: 0.386, 0.113 and 0.049, respectively. We also perform a qualitative analysis which illustrates that our model produces depth maps that closely resemble ground truth, even in cases where the ground truth is flawed. The results indicate significant improvements in accuracy and robustness, with EfficientNet being the most successful architecture.
Create account to get full access
Overview
- This paper presents a method for depth estimation using weighted-loss and transfer learning techniques.
- The proposed approach aims to improve the accuracy of depth estimation by leveraging pre-trained models and optimizing the loss function.
- The authors evaluate their method on standard depth estimation benchmarks and compare it to other state-of-the-art techniques.
Plain English Explanation
Depth estimation is the process of determining the distance between objects in an image and the camera that took the photo. This information can be useful for a variety of applications, such as 3D reconstruction, augmented reality, and autonomous navigation.
In this paper, the researchers developed a new method for depth estimation that combines two key techniques:
- Weighted-loss: The researchers modified the standard loss function used to train the depth estimation model, giving more weight to certain areas of the image. This helps the model focus on the most important regions for accurate depth prediction.
- Transfer learning: The researchers started with a pre-trained model that had been trained on a large dataset, and then fine-tuned it on the specific depth estimation task. This allows the model to leverage the knowledge gained from the initial training, while also adapting to the new task.
By using these techniques, the researchers were able to improve the accuracy of their depth estimation model compared to previous methods. This could lead to better performance in applications that rely on accurate depth information, such as depth-aware image editing and 3D reconstruction from single images.
Technical Explanation
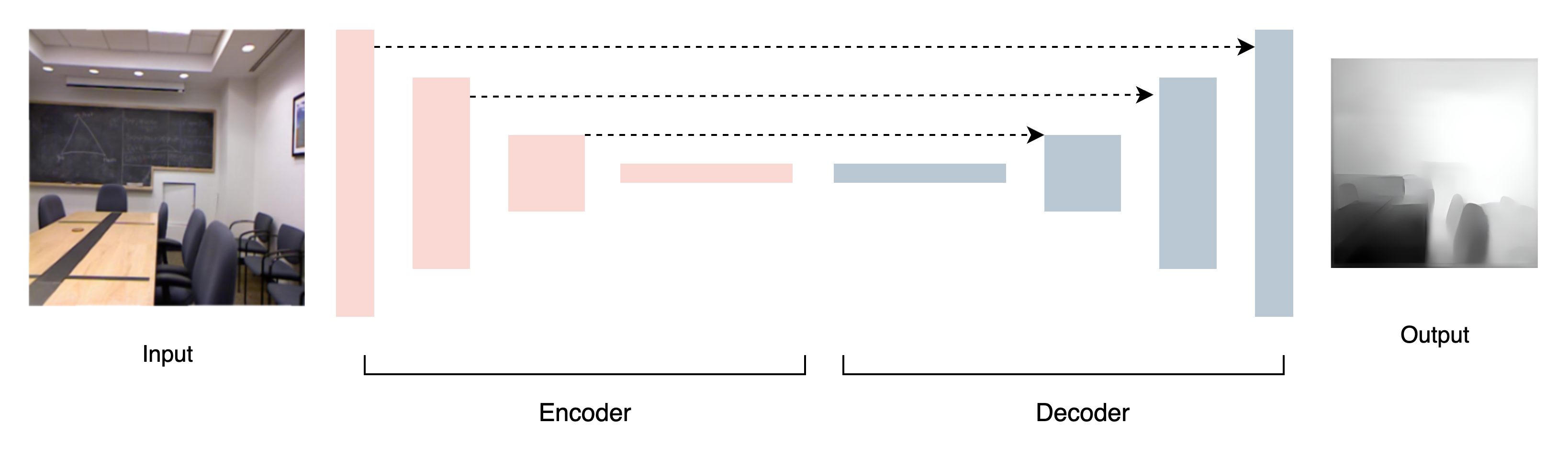
The researchers' method starts with a pre-trained convolutional neural network (CNN) model, such as a ResNet or VGG network, that has been trained on a large dataset for general image recognition tasks. They then fine-tune this pre-trained model on the specific task of depth estimation, using a dataset of images with ground-truth depth maps.
To improve the model's performance, the researchers introduce a weighted-loss function. Instead of using a standard mean-squared error loss, they assign higher weights to certain regions of the image, such as object boundaries or areas with high-contrast features. This helps the model focus on the most important aspects for accurate depth prediction.
The researchers evaluate their method on standard depth estimation benchmarks, such as the NYU Depth V2 and KITTI datasets. They compare their approach to other state-of-the-art depth estimation techniques, including those that use more complex network architectures or additional input modalities (e.g., stereo images).
The results show that the researchers' method outperforms the competing approaches on several metrics, including absolute relative error and root mean squared error. This suggests that the combination of transfer learning and weighted-loss can be an effective strategy for improving depth estimation accuracy.
Critical Analysis
The paper presents a solid methodological approach and provides a thorough evaluation of the proposed depth estimation technique. However, there are a few areas that could be further explored or addressed:
-
Generalization: The paper focuses on evaluating the method on a few standard depth estimation benchmarks. It would be beneficial to see how the technique performs on a more diverse range of datasets, including those with different types of scenes, lighting conditions, or camera setups.
-
Computational Efficiency: The paper does not provide much information about the computational requirements or inference speed of the proposed method. This could be an important consideration for real-world applications, where efficient depth estimation is crucial.
-
Robustness: The paper does not discuss the robustness of the method to common challenges in depth estimation, such as occlusions, reflections, or object transparency. Evaluating the method's performance in these more challenging scenarios could help assess its practical applicability.
-
Interpretability: The paper does not provide much insight into why the weighted-loss function improves the model's performance. A deeper analysis of the learned weights and their relationship to the scene characteristics could enhance the understanding of the method's strengths and limitations.
Overall, the paper presents a promising approach for improving depth estimation using weighted-loss and transfer learning. Further research addressing the points mentioned above could help solidify the method's position in the field of depth estimation.
Conclusion
This paper introduces a new depth estimation technique that combines weighted-loss and transfer learning to improve the accuracy of depth prediction. The researchers demonstrate that their method outperforms other state-of-the-art approaches on standard benchmarks, suggesting that it could be a valuable tool for applications that rely on accurate depth information, such as 3D reconstruction, augmented reality, and autonomous navigation. While the paper provides a solid technical foundation, further research on the method's generalization, efficiency, robustness, and interpretability could help solidify its potential impact in the field of depth estimation.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
🤿
Deep Learning-based Depth Estimation Methods from Monocular Image and Videos: A Comprehensive Survey
Uchitha Rajapaksha, Ferdous Sohel, Hamid Laga, Dean Diepeveen, Mohammed Bennamoun
0
0
Estimating depth from single RGB images and videos is of widespread interest due to its applications in many areas, including autonomous driving, 3D reconstruction, digital entertainment, and robotics. More than 500 deep learning-based papers have been published in the past 10 years, which indicates the growing interest in the task. This paper presents a comprehensive survey of the existing deep learning-based methods, the challenges they address, and how they have evolved in their architecture and supervision methods. It provides a taxonomy for classifying the current work based on their input and output modalities, network architectures, and learning methods. It also discusses the major milestones in the history of monocular depth estimation, and different pipelines, datasets, and evaluation metrics used in existing methods.
7/1/2024
DoubleTake: Geometry Guided Depth Estimation
Mohamed Sayed, Filippo Aleotti, Jamie Watson, Zawar Qureshi, Guillermo Garcia-Hernando, Gabriel Brostow, Sara Vicente, Michael Firman
0
0
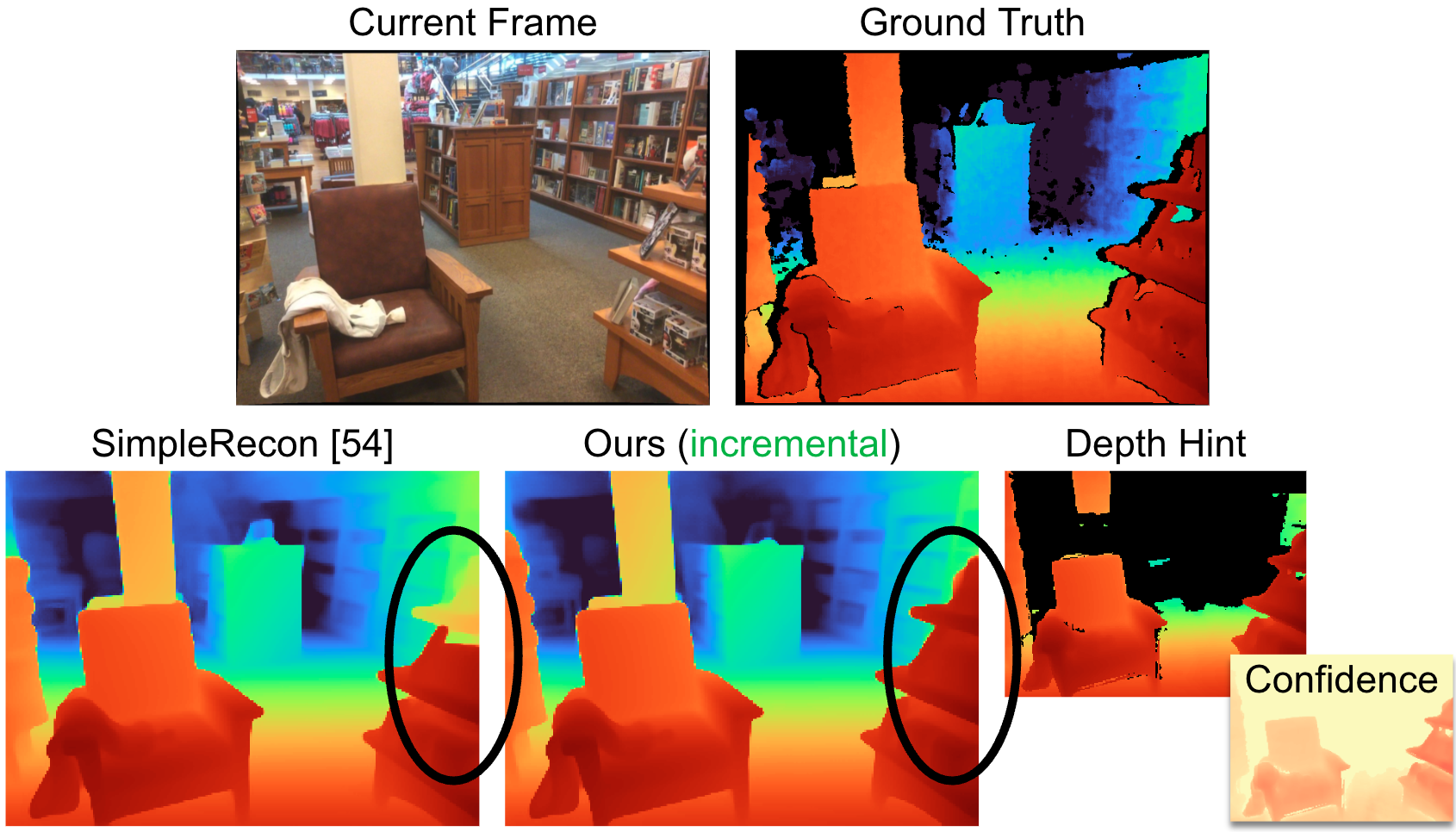
Estimating depth from a sequence of posed RGB images is a fundamental computer vision task, with applications in augmented reality, path planning etc. Prior work typically makes use of previous frames in a multi view stereo framework, relying on matching textures in a local neighborhood. In contrast, our model leverages historical predictions by giving the latest 3D geometry data as an extra input to our network. This self-generated geometric hint can encode information from areas of the scene not covered by the keyframes and it is more regularized when compared to individual predicted depth maps for previous frames. We introduce a Hint MLP which combines cost volume features with a hint of the prior geometry, rendered as a depth map from the current camera location, together with a measure of the confidence in the prior geometry. We demonstrate that our method, which can run at interactive speeds, achieves state-of-the-art estimates of depth and 3D scene reconstruction in both offline and incremental evaluation scenarios.
6/27/2024

Vision-Based Approach for Food Weight Estimation from 2D Images
Chathura Wimalasiri, Prasan Kumar Sahoo
0
0
In response to the increasing demand for efficient and non-invasive methods to estimate food weight, this paper presents a vision-based approach utilizing 2D images. The study employs a dataset of 2380 images comprising fourteen different food types in various portions, orientations, and containers. The proposed methodology integrates deep learning and computer vision techniques, specifically employing Faster R-CNN for food detection and MobileNetV3 for weight estimation. The detection model achieved a mean average precision (mAP) of 83.41%, an average Intersection over Union (IoU) of 91.82%, and a classification accuracy of 100%. For weight estimation, the model demonstrated a root mean squared error (RMSE) of 6.3204, a mean absolute percentage error (MAPE) of 0.0640%, and an R-squared value of 98.65%. The study underscores the potential applications of this technology in healthcare for nutrition counseling, fitness and wellness for dietary intake assessment, and smart food storage solutions to reduce waste. The results indicate that the combination of Faster R-CNN and MobileNetV3 provides a robust framework for accurate food weight estimation from 2D images, showcasing the synergy of computer vision and deep learning in practical applications.
5/28/2024
Domain-Transferred Synthetic Data Generation for Improving Monocular Depth Estimation
Seungyeop Lee, Knut Peterson, Solmaz Arezoomandan, Bill Cai, Peihan Li, Lifeng Zhou, David Han
0
0
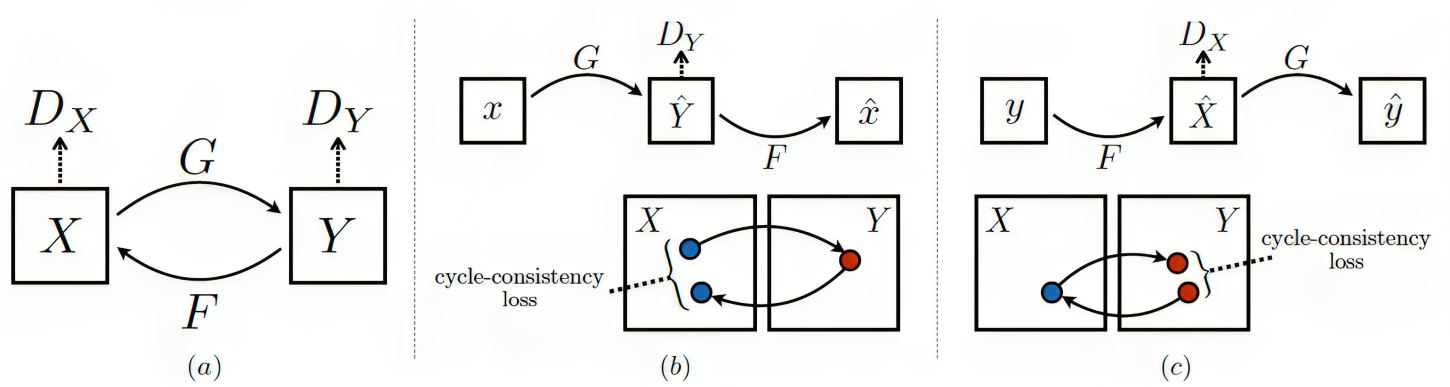
A major obstacle to the development of effective monocular depth estimation algorithms is the difficulty in obtaining high-quality depth data that corresponds to collected RGB images. Collecting this data is time-consuming and costly, and even data collected by modern sensors has limited range or resolution, and is subject to inconsistencies and noise. To combat this, we propose a method of data generation in simulation using 3D synthetic environments and CycleGAN domain transfer. We compare this method of data generation to the popular NYUDepth V2 dataset by training a depth estimation model based on the DenseDepth structure using different training sets of real and simulated data. We evaluate the performance of the models on newly collected images and LiDAR depth data from a Husky robot to verify the generalizability of the approach and show that GAN-transformed data can serve as an effective alternative to real-world data, particularly in depth estimation.
5/3/2024