DiffPoGAN: Diffusion Policies with Generative Adversarial Networks for Offline Reinforcement Learning
2406.09089
0
0

Abstract
Offline reinforcement learning (RL) can learn optimal policies from pre-collected offline datasets without interacting with the environment, but the sampled actions of the agent cannot often cover the action distribution under a given state, resulting in the extrapolation error issue. Recent works address this issue by employing generative adversarial networks (GANs). However, these methods often suffer from insufficient constraints on policy exploration and inaccurate representation of behavior policies. Moreover, the generator in GANs fails in fooling the discriminator while maximizing the expected returns of a policy. Inspired by the diffusion, a generative model with powerful feature expressiveness, we propose a new offline RL method named Diffusion Policies with Generative Adversarial Networks (DiffPoGAN). In this approach, the diffusion serves as the policy generator to generate diverse distributions of actions, and a regularization method based on maximum likelihood estimation (MLE) is developed to generate data that approximate the distribution of behavior policies. Besides, we introduce an additional regularization term based on the discriminator output to effectively constrain policy exploration for policy improvement. Comprehensive experiments are conducted on the datasets for deep data-driven reinforcement learning (D4RL), and experimental results show that DiffPoGAN outperforms state-of-the-art methods in offline RL.
Create account to get full access
Overview
- This paper introduces DiffPoGAN, a novel approach for offline reinforcement learning that combines diffusion models and generative adversarial networks (GANs).
- DiffPoGAN aims to learn a diffusion-based policy that can generate diverse and high-quality actions, without relying on online interaction with the environment.
- The proposed method builds upon recent advancements in diffusion models and offline RL, aiming to address the challenges of limited and biased offline data.
Plain English Explanation
DiffPoGAN is a new technique for reinforcement learning (RL) that doesn't require direct interaction with the environment. Instead, it uses a combination of diffusion models and generative adversarial networks (GANs) to learn a policy that can generate diverse and high-quality actions.
Diffusion models are a type of machine learning model that can generate new data by progressively adding noise to an input and then learning to reverse the process. GANs, on the other hand, are a way to train generative models by having them compete against each other.
The key idea behind DiffPoGAN is to use diffusion models to learn a policy that can generate a wide range of possible actions, and then use GANs to ensure that these actions are of high quality and aligned with the task at hand. This allows the system to learn effective policies without needing to directly interact with the environment, which can be particularly useful in situations where collecting real-world data is difficult or expensive.
By combining these two powerful machine learning techniques, the researchers behind DiffPoGAN hope to address some of the challenges of traditional offline RL, such as the problem of limited and biased data. The hope is that DiffPoGAN can lead to more robust and capable RL systems that can be deployed in a wider range of real-world applications.
Technical Explanation
The DiffPoGAN approach builds on recent advancements in diffusion models and [offline reinforcement learning](https://aimodels.fyi/papers/arxiv/learning-multimodal-behaviors-from-scratch-diffusion-policy, https://aimodels.fyi/papers/arxiv/continual-offline-reinforcement-learning-via-diffusion-based, https://aimodels.fyi/papers/arxiv/deep-generative-models-offline-policy-learning-tutorial).
The core idea is to train a diffusion-based policy generator that can produce a diverse set of high-quality actions, without requiring online interaction with the environment. This is achieved by training the generator using a combination of diffusion modeling and adversarial training against a discriminator network.
The diffusion model component of DiffPoGAN learns to progressively add noise to an initial action, and then learns to reverse this process to generate new actions. The adversarial component, modeled as a GAN, then ensures that the generated actions are aligned with the task objectives.
By jointly optimizing the diffusion-based generator and the discriminator network, DiffPoGAN aims to learn a policy that can produce a diverse set of actions that are both effective and realistic, based on the available offline data.
The researchers evaluate DiffPoGAN on a range of continuous control tasks, and show that it can outperform other state-of-the-art offline RL methods in terms of sample efficiency and final performance.
Critical Analysis
The paper provides a compelling approach for offline reinforcement learning, addressing the challenges of limited and biased data through the use of diffusion models and GANs. However, there are a few potential limitations and areas for further research:
- The evaluation is limited to continuous control tasks, and it would be interesting to see how DiffPoGAN performs on more complex, high-dimensional environments, such as those found in pixel-wise RL.
- The paper does not address the potential issue of mode collapse, where the generator may learn to produce a limited range of actions, rather than the diverse set of actions that the approach aims for.
- While the authors discuss the benefits of DiffPoGAN's ability to generate diverse actions, they do not provide a detailed analysis of the diversity of the generated actions and how this translates to improved performance.
Overall, the DiffPoGAN approach represents an interesting and promising direction for offline reinforcement learning, and the paper provides a solid foundation for further research and development in this area.
Conclusion
The DiffPoGAN paper introduces a novel approach for offline reinforcement learning that combines diffusion models and generative adversarial networks. By leveraging the strengths of these two machine learning techniques, the authors demonstrate a method for learning effective policies without requiring direct interaction with the environment.
The key contributions of DiffPoGAN are its ability to generate diverse and high-quality actions based on limited offline data, and its potential to address some of the challenges of traditional offline RL approaches. While the paper focuses on continuous control tasks, the underlying principles of DiffPoGAN could potentially be applied to a wider range of reinforcement learning problems, including those involving high-dimensional environments and complex behaviors.
As the field of reinforcement learning continues to evolve, techniques like DiffPoGAN that can learn effective policies from offline data will likely become increasingly important, enabling the deployment of RL systems in a wider range of real-world applications where online interaction may be infeasible or undesirable.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
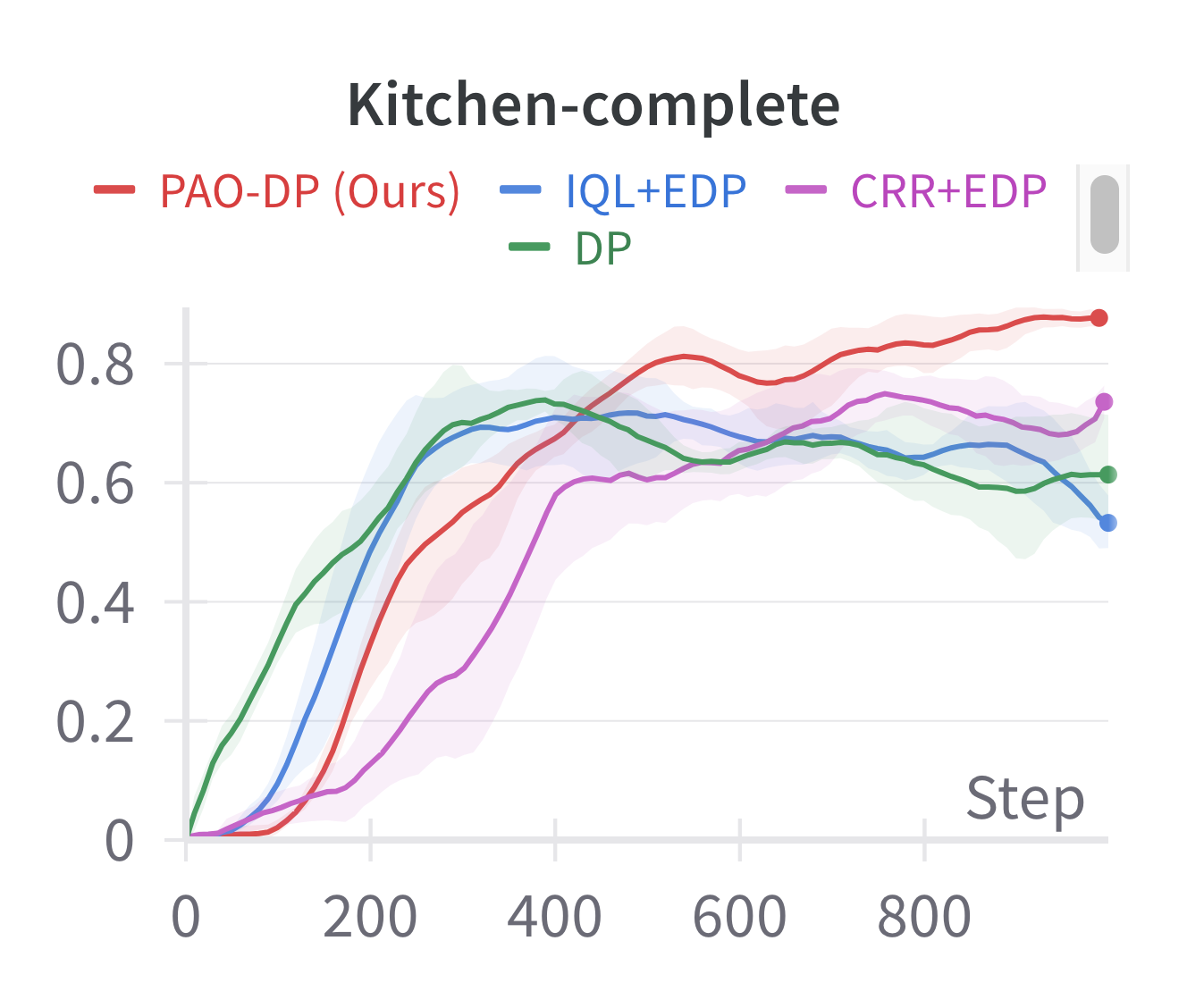
Preferred-Action-Optimized Diffusion Policies for Offline Reinforcement Learning
Tianle Zhang, Jiayi Guan, Lin Zhao, Yihang Li, Dongjiang Li, Zecui Zeng, Lei Sun, Yue Chen, Xuelong Wei, Lusong Li, Xiaodong He
0
0
Offline reinforcement learning (RL) aims to learn optimal policies from previously collected datasets. Recently, due to their powerful representational capabilities, diffusion models have shown significant potential as policy models for offline RL issues. However, previous offline RL algorithms based on diffusion policies generally adopt weighted regression to improve the policy. This approach optimizes the policy only using the collected actions and is sensitive to Q-values, which limits the potential for further performance enhancement. To this end, we propose a novel preferred-action-optimized diffusion policy for offline RL. In particular, an expressive conditional diffusion model is utilized to represent the diverse distribution of a behavior policy. Meanwhile, based on the diffusion model, preferred actions within the same behavior distribution are automatically generated through the critic function. Moreover, an anti-noise preference optimization is designed to achieve policy improvement by using the preferred actions, which can adapt to noise-preferred actions for stable training. Extensive experiments demonstrate that the proposed method provides competitive or superior performance compared to previous state-of-the-art offline RL methods, particularly in sparse reward tasks such as Kitchen and AntMaze. Additionally, we empirically prove the effectiveness of anti-noise preference optimization.
5/30/2024

Learning Multimodal Behaviors from Scratch with Diffusion Policy Gradient
Zechu Li, Rickmer Krohn, Tao Chen, Anurag Ajay, Pulkit Agrawal, Georgia Chalvatzaki
0
0
Deep reinforcement learning (RL) algorithms typically parameterize the policy as a deep network that outputs either a deterministic action or a stochastic one modeled as a Gaussian distribution, hence restricting learning to a single behavioral mode. Meanwhile, diffusion models emerged as a powerful framework for multimodal learning. However, the use of diffusion policies in online RL is hindered by the intractability of policy likelihood approximation, as well as the greedy objective of RL methods that can easily skew the policy to a single mode. This paper presents Deep Diffusion Policy Gradient (DDiffPG), a novel actor-critic algorithm that learns from scratch multimodal policies parameterized as diffusion models while discovering and maintaining versatile behaviors. DDiffPG explores and discovers multiple modes through off-the-shelf unsupervised clustering combined with novelty-based intrinsic motivation. DDiffPG forms a multimodal training batch and utilizes mode-specific Q-learning to mitigate the inherent greediness of the RL objective, ensuring the improvement of the diffusion policy across all modes. Our approach further allows the policy to be conditioned on mode-specific embeddings to explicitly control the learned modes. Empirical studies validate DDiffPG's capability to master multimodal behaviors in complex, high-dimensional continuous control tasks with sparse rewards, also showcasing proof-of-concept dynamic online replanning when navigating mazes with unseen obstacles.
6/4/2024

Continual Offline Reinforcement Learning via Diffusion-based Dual Generative Replay
Jinmei Liu, Wenbin Li, Xiangyu Yue, Shilin Zhang, Chunlin Chen, Zhi Wang
0
0
We study continual offline reinforcement learning, a practical paradigm that facilitates forward transfer and mitigates catastrophic forgetting to tackle sequential offline tasks. We propose a dual generative replay framework that retains previous knowledge by concurrent replay of generated pseudo-data. First, we decouple the continual learning policy into a diffusion-based generative behavior model and a multi-head action evaluation model, allowing the policy to inherit distributional expressivity for encompassing a progressive range of diverse behaviors. Second, we train a task-conditioned diffusion model to mimic state distributions of past tasks. Generated states are paired with corresponding responses from the behavior generator to represent old tasks with high-fidelity replayed samples. Finally, by interleaving pseudo samples with real ones of the new task, we continually update the state and behavior generators to model progressively diverse behaviors, and regularize the multi-head critic via behavior cloning to mitigate forgetting. Experiments demonstrate that our method achieves better forward transfer with less forgetting, and closely approximates the results of using previous ground-truth data due to its high-fidelity replay of the sample space. Our code is available at href{https://github.com/NJU-RL/CuGRO}{https://github.com/NJU-RL/CuGRO}.
4/19/2024
🤿
Deep Generative Models for Offline Policy Learning: Tutorial, Survey, and Perspectives on Future Directions
Jiayu Chen, Bhargav Ganguly, Yang Xu, Yongsheng Mei, Tian Lan, Vaneet Aggarwal
0
0
Deep generative models (DGMs) have demonstrated great success across various domains, particularly in generating texts, images, and videos using models trained from offline data. Similarly, data-driven decision-making and robotic control also necessitate learning a generator function from the offline data to serve as the strategy or policy. In this case, applying deep generative models in offline policy learning exhibits great potential, and numerous studies have explored in this direction. However, this field still lacks a comprehensive review and so developments of different branches are relatively independent. In this paper, we provide the first systematic review on the applications of deep generative models for offline policy learning. In particular, we cover five mainstream deep generative models, including Variational Auto-Encoders, Generative Adversarial Networks, Normalizing Flows, Transformers, and Diffusion Models, and their applications in both offline reinforcement learning (offline RL) and imitation learning (IL). Offline RL and IL are two main branches of offline policy learning and are widely-adopted techniques for sequential decision-making. Notably, for each type of DGM-based offline policy learning, we distill its fundamental scheme, categorize related works based on the usage of the DGM, and sort out the development process of algorithms in that field. Subsequent to the main content, we provide in-depth discussions on deep generative models and offline policy learning as a summary, based on which we present our perspectives on future research directions. This work offers a hands-on reference for the research progress in deep generative models for offline policy learning, and aims to inspire improved DGM-based offline RL or IL algorithms. For convenience, we maintain a paper list on https://github.com/LucasCJYSDL/DGMs-for-Offline-Policy-Learning.
5/28/2024