A Diffusion-based Data Generator for Training Object Recognition Models in Ultra-Range Distance

0

Sign in to get full access
Overview
- This paper presents a novel diffusion-based data generator for training object recognition models to work at ultra-long distances.
- The generator can produce synthetic images of objects at varying distances, allowing models to learn robust features for accurate detection and classification even in challenging long-range scenarios.
- The authors demonstrate the effectiveness of their approach by training object recognition models on the generated data and evaluating their performance on real-world long-distance datasets.
Plain English Explanation
The paper introduces a new way to generate artificial images of objects for training computer vision models. Traditional approaches for creating training data can struggle to capture the complexities of real-world scenes, especially when dealing with objects that are far away from the camera.
To address this, the researchers developed a diffusion-based data generator. This generator uses a machine learning technique called diffusion to produce synthetic images that mimic the appearance of distant objects. By training object recognition models on this generated data, the models can learn robust features that allow them to accurately detect and classify objects even at ultra-long ranges.
The key advantage of this approach is that it enables the creation of diverse and realistic training data that would be difficult or expensive to capture in the real world. This, in turn, helps the trained models perform better in challenging long-distance scenarios, which have important applications in areas like autonomous vehicles, surveillance, and remote monitoring.
Technical Explanation
The paper presents a diffusion-based data generator for training object recognition models to work in ultra-long distance scenarios. Diffusion is a machine learning technique that can be used to generate synthetic images by gradually adding noise to a clean image and then learning to reverse the process.
The authors leverage this diffusion-based approach to create a generator that can produce realistic-looking images of objects at varying distances. The generator takes in clean object images and applies a series of diffusion steps to introduce noise and distortion, simulating the appearance of distant objects. By training object recognition models on this generated data, the researchers show that the models can learn robust features for accurate detection and classification even in challenging long-range settings.
The paper evaluates the effectiveness of the proposed approach by training object recognition models on the generated data and testing them on real-world long-distance datasets. The results demonstrate significant performance improvements over models trained on traditional datasets, highlighting the value of the diffusion-based data generation technique for addressing the challenges of ultra-long range object recognition.
Critical Analysis
The paper presents a novel and promising approach to addressing the challenge of training object recognition models for ultra-long distance scenarios. By leveraging diffusion-based data generation, the researchers have developed a technique that can create diverse and realistic synthetic training data, which is a key limitation of many traditional methods.
One potential limitation of the approach is that it relies on the ability of the diffusion model to accurately simulate the visual characteristics of distant objects. While the results suggest this is effective, there may be certain nuances or edge cases that the diffusion-based generator struggles to capture. Further research could investigate the model's robustness to different types of long-range distortions and how to improve the fidelity of the generated data.
Additionally, the paper does not explore the potential for the diffusion-based generator to be used in other computer vision tasks beyond object recognition, such as instance segmentation or depth estimation. Investigating the broader applicability of this approach could further demonstrate its value and potential impact on the field.
Overall, the research presented in this paper represents an important step forward in addressing the challenges of ultra-long range object recognition, and the diffusion-based data generation technique could have significant implications for the development of robust and reliable computer vision systems, particularly in domains like autonomous vehicles and remote monitoring.
Conclusion
This paper introduces a novel diffusion-based data generator for training object recognition models to work in ultra-long distance scenarios. By leveraging diffusion, a machine learning technique for generating synthetic images, the researchers have developed a method to create diverse and realistic training data that can help models learn robust features for accurate detection and classification of distant objects.
The results demonstrate the effectiveness of this approach, with object recognition models trained on the generated data outperforming those trained on traditional datasets in challenging long-range settings. This work represents an important advancement in addressing the challenges of ultra-long range object recognition, with potential applications in areas like autonomous vehicles, surveillance, and remote monitoring.
Overall, the research presented in this paper highlights the value of innovative data generation techniques for developing more capable and reliable computer vision systems, and the diffusion-based approach could have broader implications for a wide range of computer vision tasks beyond just object recognition.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
A Diffusion-based Data Generator for Training Object Recognition Models in Ultra-Range Distance
Eran Bamani, Eden Nissinman, Lisa Koenigsberg, Inbar Meir, Avishai Sintov
Object recognition, commonly performed by a camera, is a fundamental requirement for robots to complete complex tasks. Some tasks require recognizing objects far from the robot's camera. A challenging example is Ultra-Range Gesture Recognition (URGR) in human-robot interaction where the user exhibits directive gestures at a distance of up to 25~m from the robot. However, training a model to recognize hardly visible objects located in ultra-range requires an exhaustive collection of a significant amount of labeled samples. The generation of synthetic training datasets is a recent solution to the lack of real-world data, while unable to properly replicate the realistic visual characteristics of distant objects in images. In this letter, we propose the Diffusion in Ultra-Range (DUR) framework based on a Diffusion model to generate labeled images of distant objects in various scenes. The DUR generator receives a desired distance and class (e.g., gesture) and outputs a corresponding synthetic image. We apply DUR to train a URGR model with directive gestures in which fine details of the gesturing hand are challenging to distinguish. DUR is compared to other types of generative models showcasing superiority both in fidelity and in recognition success rate when training a URGR model. More importantly, training a DUR model on a limited amount of real data and then using it to generate synthetic data for training a URGR model outperforms directly training the URGR model on real data. The synthetic-based URGR model is also demonstrated in gesture-based direction of a ground robot.
Read more4/16/2024
👁️
0
Ultra-Range Gesture Recognition using a Web-Camera in Human-Robot Interaction
Eran Bamani, Eden Nissinman, Inbar Meir, Lisa Koenigsberg, Avishai Sintov
Hand gestures play a significant role in human interactions where non-verbal intentions, thoughts and commands are conveyed. In Human-Robot Interaction (HRI), hand gestures offer a similar and efficient medium for conveying clear and rapid directives to a robotic agent. However, state-of-the-art vision-based methods for gesture recognition have been shown to be effective only up to a user-camera distance of seven meters. Such a short distance range limits practical HRI with, for example, service robots, search and rescue robots and drones. In this work, we address the Ultra-Range Gesture Recognition (URGR) problem by aiming for a recognition distance of up to 25 meters and in the context of HRI. We propose the URGR framework, a novel deep-learning, using solely a simple RGB camera. Gesture inference is based on a single image. First, a novel super-resolution model termed High-Quality Network (HQ-Net) uses a set of self-attention and convolutional layers to enhance the low-resolution image of the user. Then, we propose a novel URGR classifier termed Graph Vision Transformer (GViT) which takes the enhanced image as input. GViT combines the benefits of a Graph Convolutional Network (GCN) and a modified Vision Transformer (ViT). Evaluation of the proposed framework over diverse test data yields a high recognition rate of 98.1%. The framework has also exhibited superior performance compared to human recognition in ultra-range distances. With the framework, we analyze and demonstrate the performance of an autonomous quadruped robot directed by human gestures in complex ultra-range indoor and outdoor environments, acquiring 96% recognition rate on average.
Read more4/11/2024

0
Dynamic Gesture Recognition in Ultra-Range Distance for Effective Human-Robot Interaction
Eran Bamani Beeri, Eden Nissinman, Avishai Sintov
This paper presents a novel approach for ultra-range gesture recognition, addressing Human-Robot Interaction (HRI) challenges over extended distances. By leveraging human gestures in video data, we propose the Temporal-Spatiotemporal Fusion Network (TSFN) model that surpasses the limitations of current methods, enabling robots to understand gestures from long distances. With applications in service robots, search and rescue operations, and drone-based interactions, our approach enhances HRI in expansive environments. Experimental validation demonstrates significant advancements in gesture recognition accuracy, particularly in prolonged gesture sequences.
Read more8/1/2024
0
UGG: Unified Generative Grasping
Jiaxin Lu, Hao Kang, Haoxiang Li, Bo Liu, Yiding Yang, Qixing Huang, Gang Hua
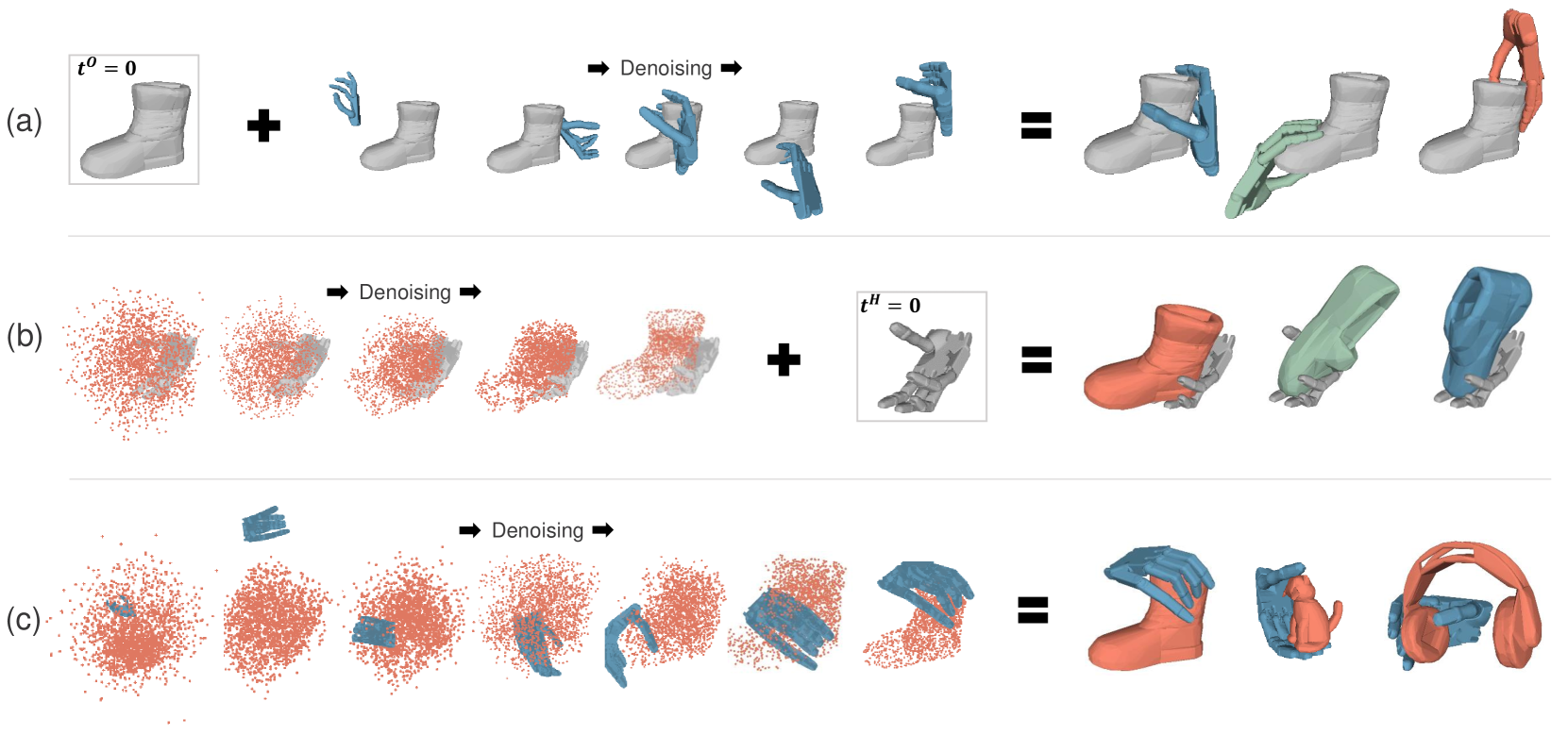
Dexterous grasping aims to produce diverse grasping postures with a high grasping success rate. Regression-based methods that directly predict grasping parameters given the object may achieve a high success rate but often lack diversity. Generation-based methods that generate grasping postures conditioned on the object can often produce diverse grasping, but they are insufficient for high grasping success due to lack of discriminative information. To mitigate, we introduce a unified diffusion-based dexterous grasp generation model, dubbed the name UGG, which operates within the object point cloud and hand parameter spaces. Our all-transformer architecture unifies the information from the object, the hand, and the contacts, introducing a novel representation of contact points for improved contact modeling. The flexibility and quality of our model enable the integration of a lightweight discriminator, benefiting from simulated discriminative data, which pushes for a high success rate while preserving high diversity. Beyond grasp generation, our model can also generate objects based on hand information, offering valuable insights into object design and studying how the generative model perceives objects. Our model achieves state-of-the-art dexterous grasping on the large-scale DexGraspNet dataset while facilitating human-centric object design, marking a significant advancement in dexterous grasping research. Our project page is https://jiaxin-lu.github.io/ugg/.
Read more7/29/2024