Distributed Multi-Agent Reinforcement Learning Based on Graph-Induced Local Value Functions
2202.13046
0
0
🏅
Abstract
Achieving distributed reinforcement learning (RL) for large-scale cooperative multi-agent systems (MASs) is challenging because: (i) each agent has access to only limited information; (ii) issues on convergence or computational complexity emerge due to the curse of dimensionality. In this paper, we propose a general computationally efficient distributed framework for cooperative multi-agent reinforcement learning (MARL) by utilizing the structures of graphs involved in this problem. We introduce three coupling graphs describing three types of inter-agent couplings in MARL, namely, the state graph, the observation graph and the reward graph. By further considering a communication graph, we propose two distributed RL approaches based on local value-functions derived from the coupling graphs. The first approach is able to reduce sample complexity significantly under specific conditions on the aforementioned four graphs. The second approach provides an approximate solution and can be efficient even for problems with dense coupling graphs. Here there is a trade-off between minimizing the approximation error and reducing the computational complexity. Simulations show that our RL algorithms have a significantly improved scalability to large-scale MASs compared with centralized and consensus-based distributed RL algorithms.
Create account to get full access
Overview
- Cooperative multi-agent reinforcement learning (MARL) is challenging due to limited information available to each agent and the curse of dimensionality.
- The paper proposes a computationally efficient distributed framework for MARL by utilizing graph structures to model different types of inter-agent couplings.
- Two distributed RL approaches are introduced, with one reducing sample complexity and the other providing an approximate solution for problems with dense coupling graphs.
- The proposed RL algorithms show significantly improved scalability to large-scale multi-agent systems compared to centralized and consensus-based distributed RL algorithms.
Plain English Explanation
Reinforcement learning (RL) is a machine learning technique where agents learn how to make decisions by interacting with their environment and receiving rewards or penalties. In a cooperative multi-agent system (MAS), multiple agents work together to achieve a common goal. Achieving distributed RL for large-scale cooperative MASs is challenging because each agent only has access to limited information, and as the number of agents increases, issues with convergence and computational complexity can arise due to the curse of dimensionality.
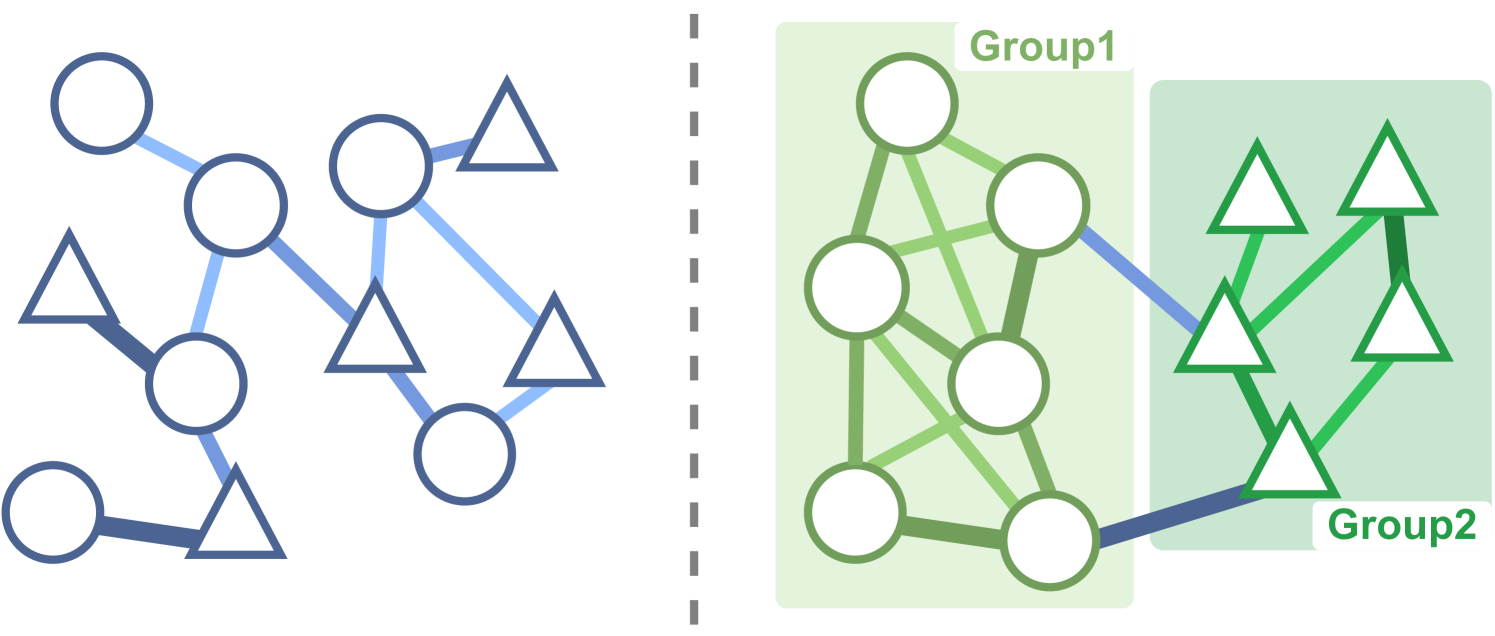
To address these challenges, the researchers propose a general computationally efficient distributed framework for cooperative MARL. They introduce three coupling graphs to describe different types of inter-agent couplings: the state graph, the observation graph, and the reward graph. By also considering a communication graph, the researchers develop two distributed RL approaches based on local value-functions derived from these coupling graphs.
The first approach is able to significantly reduce the sample complexity (the number of interactions required to learn) under specific conditions on the four graphs. The second approach provides an approximate solution and can be efficient even for problems with dense coupling graphs, but there is a trade-off between minimizing the approximation error and reducing the computational complexity.
Through simulations, the researchers show that their RL algorithms have a significantly improved scalability to large-scale multi-agent systems compared to centralized and consensus-based distributed RL algorithms.
Technical Explanation
The paper proposes a general computationally efficient distributed framework for cooperative multi-agent reinforcement learning (MARL). The key idea is to leverage the structures of graphs involved in this problem to develop efficient distributed RL algorithms.
The researchers introduce three coupling graphs to describe different types of inter-agent couplings in MARL:
- State graph: Captures the dependencies between the states of different agents.
- Observation graph: Captures the dependencies between the observations of different agents.
- Reward graph: Captures the dependencies between the rewards of different agents.
By also considering a communication graph that models the information exchange between agents, the researchers develop two distributed RL approaches:
- Approach 1: This approach is able to reduce the sample complexity significantly under specific conditions on the four graphs (state, observation, reward, and communication). The key idea is to derive local value-functions from the coupling graphs and use them in the RL algorithm.
- Approach 2: This approach provides an approximate solution and can be efficient even for problems with dense coupling graphs. However, there is a trade-off between minimizing the approximation error and reducing the computational complexity.
Through simulations, the researchers demonstrate that their RL algorithms have a significantly improved scalability to large-scale multi-agent systems compared to centralized and consensus-based distributed RL algorithms.
Critical Analysis
The paper provides a novel and computationally efficient distributed framework for cooperative MARL, which addresses the challenges of limited information access and the curse of dimensionality that arise in large-scale multi-agent systems.
One potential limitation of the research is that the specific conditions required for the first approach to significantly reduce the sample complexity may not always be met in real-world scenarios. Additionally, the trade-off between minimizing the approximation error and reducing computational complexity in the second approach may not be easily balanced, depending on the problem at hand.
Furthermore, the paper does not discuss the potential adversarial aspects of multi-agent systems, where some agents may have conflicting objectives or even actively try to sabotage the learning process. Extending the proposed framework to handle such adversarial scenarios could be an area for further research.
Overall, the paper presents a promising approach to addressing the challenges of large-scale cooperative MARL, but more research may be needed to fully understand its limitations and potential extensions.
Conclusion
The paper proposes a computationally efficient distributed framework for cooperative multi-agent reinforcement learning, which leverages graph structures to model different types of inter-agent couplings. The researchers introduce two distributed RL approaches that show significantly improved scalability to large-scale multi-agent systems compared to centralized and consensus-based algorithms.
While the proposed framework addresses key challenges in cooperative MARL, further research may be needed to explore its limitations, particularly in the context of adversarial multi-agent systems. Nonetheless, this work represents an important step towards enabling efficient RL-based decision-making in large-scale cooperative multi-agent environments.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
Group-Aware Coordination Graph for Multi-Agent Reinforcement Learning
Wei Duan, Jie Lu, Junyu Xuan
0
0
Cooperative Multi-Agent Reinforcement Learning (MARL) necessitates seamless collaboration among agents, often represented by an underlying relation graph. Existing methods for learning this graph primarily focus on agent-pair relations, neglecting higher-order relationships. While several approaches attempt to extend cooperation modelling to encompass behaviour similarities within groups, they commonly fall short in concurrently learning the latent graph, thereby constraining the information exchange among partially observed agents. To overcome these limitations, we present a novel approach to infer the Group-Aware Coordination Graph (GACG), which is designed to capture both the cooperation between agent pairs based on current observations and group-level dependencies from behaviour patterns observed across trajectories. This graph is further used in graph convolution for information exchange between agents during decision-making. To further ensure behavioural consistency among agents within the same group, we introduce a group distance loss, which promotes group cohesion and encourages specialization between groups. Our evaluations, conducted on StarCraft II micromanagement tasks, demonstrate GACG's superior performance. An ablation study further provides experimental evidence of the effectiveness of each component of our method.
5/14/2024

eQMARL: Entangled Quantum Multi-Agent Reinforcement Learning for Distributed Cooperation over Quantum Channels
Alexander DeRieux, Walid Saad
0
0
Collaboration is a key challenge in distributed multi-agent reinforcement learning (MARL) environments. Learning frameworks for these decentralized systems must weigh the benefits of explicit player coordination against the communication overhead and computational cost of sharing local observations and environmental data. Quantum computing has sparked a potential synergy between quantum entanglement and cooperation in multi-agent environments, which could enable more efficient distributed collaboration with minimal information sharing. This relationship is largely unexplored, however, as current state-of-the-art quantum MARL (QMARL) implementations rely on classical information sharing rather than entanglement over a quantum channel as a coordination medium. In contrast, in this paper, a novel framework dubbed entangled QMARL (eQMARL) is proposed. The proposed eQMARL is a distributed actor-critic framework that facilitates cooperation over a quantum channel and eliminates local observation sharing via a quantum entangled split critic. Introducing a quantum critic uniquely spread across the agents allows coupling of local observation encoders through entangled input qubits over a quantum channel, which requires no explicit sharing of local observations and reduces classical communication overhead. Further, agent policies are tuned through joint observation-value function estimation via joint quantum measurements, thereby reducing the centralized computational burden. Experimental results show that eQMARL with ${Psi}^{+}$ entanglement converges to a cooperative strategy up to $17.8%$ faster and with a higher overall score compared to split classical and fully centralized classical and quantum baselines. The results also show that eQMARL achieves this performance with a constant factor of $25$-times fewer centralized parameters compared to the split classical baseline.
5/29/2024
🏅
LLM-based Multi-Agent Reinforcement Learning: Current and Future Directions
Chuanneng Sun, Songjun Huang, Dario Pompili
0
0
In recent years, Large Language Models (LLMs) have shown great abilities in various tasks, including question answering, arithmetic problem solving, and poem writing, among others. Although research on LLM-as-an-agent has shown that LLM can be applied to Reinforcement Learning (RL) and achieve decent results, the extension of LLM-based RL to Multi-Agent System (MAS) is not trivial, as many aspects, such as coordination and communication between agents, are not considered in the RL frameworks of a single agent. To inspire more research on LLM-based MARL, in this letter, we survey the existing LLM-based single-agent and multi-agent RL frameworks and provide potential research directions for future research. In particular, we focus on the cooperative tasks of multiple agents with a common goal and communication among them. We also consider human-in/on-the-loop scenarios enabled by the language component in the framework.
5/21/2024
🏅
Fully Distributed Fog Load Balancing with Multi-Agent Reinforcement Learning
Maad Ebrahim, Abdelhakim Hafid
0
0
Real-time Internet of Things (IoT) applications require real-time support to handle the ever-growing demand for computing resources to process IoT workloads. Fog Computing provides high availability of such resources in a distributed manner. However, these resources must be efficiently managed to distribute unpredictable traffic demands among heterogeneous Fog resources. This paper proposes a fully distributed load-balancing solution with Multi-Agent Reinforcement Learning (MARL) that intelligently distributes IoT workloads to optimize the waiting time while providing fair resource utilization in the Fog network. These agents use transfer learning for life-long self-adaptation to dynamic changes in the environment. By leveraging distributed decision-making, MARL agents effectively minimize the waiting time compared to a single centralized agent solution and other baselines, enhancing end-to-end execution delay. Besides performance gain, a fully distributed solution allows for a global-scale implementation where agents can work independently in small collaboration regions, leveraging nearby local resources. Furthermore, we analyze the impact of a realistic frequency to observe the state of the environment, unlike the unrealistic common assumption in the literature of having observations readily available in real-time for every required action. The findings highlight the trade-off between realism and performance using an interval-based Gossip-based multi-casting protocol against assuming real-time observation availability for every generated workload.
5/22/2024