Distributionally Robust Constrained Reinforcement Learning under Strong Duality
2406.15788
0
0
Abstract
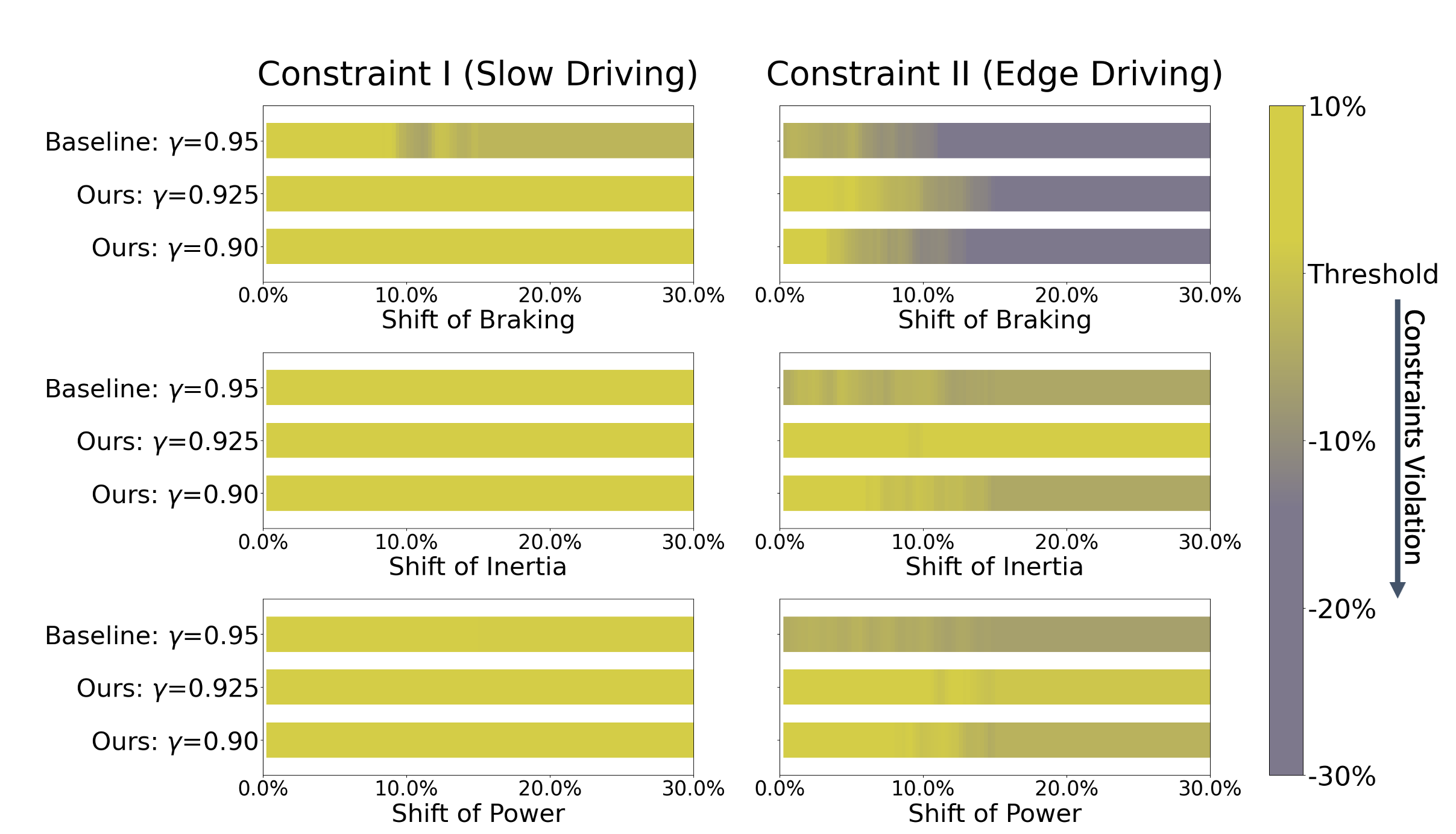
We study the problem of Distributionally Robust Constrained RL (DRC-RL), where the goal is to maximize the expected reward subject to environmental distribution shifts and constraints. This setting captures situations where training and testing environments differ, and policies must satisfy constraints motivated by safety or limited budgets. Despite significant progress toward algorithm design for the separate problems of distributionally robust RL and constrained RL, there do not yet exist algorithms with end-to-end convergence guarantees for DRC-RL. We develop an algorithmic framework based on strong duality that enables the first efficient and provable solution in a class of environmental uncertainties. Further, our framework exposes an inherent structure of DRC-RL that arises from the combination of distributional robustness and constraints, which prevents a popular class of iterative methods from tractably solving DRC-RL, despite such frameworks being applicable for each of distributionally robust RL and constrained RL individually. Finally, we conduct experiments on a car racing benchmark to evaluate the effectiveness of the proposed algorithm.
Create account to get full access
Overview
- This paper presents a novel approach to distributionally robust constrained reinforcement learning (DR-CRL) under strong duality.
- It introduces a robust optimization framework that can handle uncertain state and reward dynamics, as well as safety constraints, in a principled manner.
- The proposed method can achieve better sample efficiency and robustness compared to existing approaches, as demonstrated through theoretical analysis and empirical evaluations.
Plain English Explanation
In reinforcement learning (RL), an agent tries to learn the best actions to take in an environment in order to maximize some reward. However, real-world environments are often uncertain and can have safety constraints that must be respected. Distributionally robust constrained reinforcement learning aims to address this by accounting for the uncertainty in the environment and ensuring that any learned policies satisfy the given constraints.
The key idea in this paper is to formulate the RL problem as a robust optimization problem, where the agent tries to find the best policy while considering the worst-case scenario within a set of possible environment dynamics. This allows the agent to learn policies that are more robust to uncertainties. Additionally, the authors show that under certain conditions, this robust optimization problem can be solved efficiently using strong duality, leading to better sample efficiency compared to previous approaches.
Through theoretical analysis and experiments, the authors demonstrate that their distributionally robust constrained RL method can achieve better performance and robustness compared to standard RL techniques, especially in settings with uncertain dynamics and safety constraints.
Technical Explanation
The paper formulates the RL problem as a distributionally robust Markov decision process (DR-MDP), where the agent aims to find an optimal policy while considering the worst-case scenario within a set of possible environment dynamics. This is achieved by introducing a nested optimization problem, where the outer problem finds the optimal policy, and the inner problem finds the worst-case environment dynamics.
The authors show that under certain conditions, this nested optimization problem can be solved efficiently using strong duality, leading to a single-level optimization problem that can be solved using standard RL techniques. This allows the method to achieve better sample efficiency compared to previous distributionally robust RL approaches, which often require solving the nested optimization problem directly.
The proposed DR-CRL method is evaluated on a range of benchmark environments, including navigation tasks and multi-agent RL scenarios. The results demonstrate that the DR-CRL approach can achieve superior performance and robustness compared to standard RL techniques, especially in the presence of model uncertainty and safety constraints.
Critical Analysis
The paper presents a strong theoretical foundation for the proposed DR-CRL method, and the empirical evaluations provide compelling evidence of its effectiveness. However, the authors acknowledge several limitations and areas for future research:
- The strong duality condition required for efficient optimization may not hold in all problem settings, limiting the applicability of the method.
- The paper focuses on episodic tasks and does not consider continuous-time or infinite-horizon problems, which may be important in real-world applications.
- The experiments are conducted in relatively simple environments, and further evaluation in more complex, real-world scenarios would be necessary to assess the scalability and practicality of the approach.
Additionally, while the paper provides a rigorous technical treatment, the authors could have done more to discuss the broader implications and potential societal impact of their work, such as how it could be applied to safety-critical domains like autonomous driving or medical decision-making.
Conclusion
This paper presents a novel approach to distributionally robust constrained reinforcement learning that can achieve better sample efficiency and robustness compared to existing methods. By formulating the RL problem as a robust optimization problem and leveraging strong duality, the authors develop an efficient algorithm that can handle uncertain state and reward dynamics, as well as safety constraints, in a principled manner.
The theoretical analysis and empirical evaluations demonstrate the effectiveness of the proposed DR-CRL method, particularly in settings with model uncertainty and safety requirements. While the paper identifies several limitations and avenues for future research, it represents an important step forward in developing robust and sample-efficient RL techniques for real-world applications.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
Sample-Efficient Robust Multi-Agent Reinforcement Learning in the Face of Environmental Uncertainty
Laixi Shi, Eric Mazumdar, Yuejie Chi, Adam Wierman
0
0
To overcome the sim-to-real gap in reinforcement learning (RL), learned policies must maintain robustness against environmental uncertainties. While robust RL has been widely studied in single-agent regimes, in multi-agent environments, the problem remains understudied -- despite the fact that the problems posed by environmental uncertainties are often exacerbated by strategic interactions. This work focuses on learning in distributionally robust Markov games (RMGs), a robust variant of standard Markov games, wherein each agent aims to learn a policy that maximizes its own worst-case performance when the deployed environment deviates within its own prescribed uncertainty set. This results in a set of robust equilibrium strategies for all agents that align with classic notions of game-theoretic equilibria. Assuming a non-adaptive sampling mechanism from a generative model, we propose a sample-efficient model-based algorithm (DRNVI) with finite-sample complexity guarantees for learning robust variants of various notions of game-theoretic equilibria. We also establish an information-theoretic lower bound for solving RMGs, which confirms the near-optimal sample complexity of DRNVI with respect to problem-dependent factors such as the size of the state space, the target accuracy, and the horizon length.
5/10/2024
🏅
A Dual Perspective of Reinforcement Learning for Imposing Policy Constraints
Bram De Cooman, Johan Suykens
0
0
Model-free reinforcement learning methods lack an inherent mechanism to impose behavioural constraints on the trained policies. While certain extensions exist, they remain limited to specific types of constraints, such as value constraints with additional reward signals or visitation density constraints. In this work we try to unify these existing techniques and bridge the gap with classical optimization and control theory, using a generic primal-dual framework for value-based and actor-critic reinforcement learning methods. The obtained dual formulations turn out to be especially useful for imposing additional constraints on the learned policy, as an intrinsic relationship between such dual constraints (or regularization terms) and reward modifications in the primal is reveiled. Furthermore, using this framework, we are able to introduce some novel types of constraints, allowing to impose bounds on the policy's action density or on costs associated with transitions between consecutive states and actions. From the adjusted primal-dual optimization problems, a practical algorithm is derived that supports various combinations of policy constraints that are automatically handled throughout training using trainable reward modifications. The resulting $texttt{DualCRL}$ method is examined in more detail and evaluated under different (combinations of) constraints on two interpretable environments. The results highlight the efficacy of the method, which ultimately provides the designer of such systems with a versatile toolbox of possible policy constraints.
4/26/2024

Time-Constrained Robust MDPs
Adil Zouitine, David Bertoin, Pierre Clavier, Matthieu Geist, Emmanuel Rachelson
0
0
Robust reinforcement learning is essential for deploying reinforcement learning algorithms in real-world scenarios where environmental uncertainty predominates. Traditional robust reinforcement learning often depends on rectangularity assumptions, where adverse probability measures of outcome states are assumed to be independent across different states and actions. This assumption, rarely fulfilled in practice, leads to overly conservative policies. To address this problem, we introduce a new time-constrained robust MDP (TC-RMDP) formulation that considers multifactorial, correlated, and time-dependent disturbances, thus more accurately reflecting real-world dynamics. This formulation goes beyond the conventional rectangularity paradigm, offering new perspectives and expanding the analytical framework for robust RL. We propose three distinct algorithms, each using varying levels of environmental information, and evaluate them extensively on continuous control benchmarks. Our results demonstrate that these algorithms yield an efficient tradeoff between performance and robustness, outperforming traditional deep robust RL methods in time-constrained environments while preserving robustness in classical benchmarks. This study revisits the prevailing assumptions in robust RL and opens new avenues for developing more practical and realistic RL applications.
6/13/2024
🏅
Distributionally Robust Reinforcement Learning with Interactive Data Collection: Fundamental Hardness and Near-Optimal Algorithm
Miao Lu, Han Zhong, Tong Zhang, Jose Blanchet
0
0
The sim-to-real gap, which represents the disparity between training and testing environments, poses a significant challenge in reinforcement learning (RL). A promising approach to addressing this challenge is distributionally robust RL, often framed as a robust Markov decision process (RMDP). In this framework, the objective is to find a robust policy that achieves good performance under the worst-case scenario among all environments within a pre-specified uncertainty set centered around the training environment. Unlike previous work, which relies on a generative model or a pre-collected offline dataset enjoying good coverage of the deployment environment, we tackle robust RL via interactive data collection, where the learner interacts with the training environment only and refines the policy through trial and error. In this robust RL paradigm, two main challenges emerge: managing distributional robustness while striking a balance between exploration and exploitation during data collection. Initially, we establish that sample-efficient learning without additional assumptions is unattainable owing to the curse of support shift; i.e., the potential disjointedness of the distributional supports between the training and testing environments. To circumvent such a hardness result, we introduce the vanishing minimal value assumption to RMDPs with a total-variation (TV) distance robust set, postulating that the minimal value of the optimal robust value function is zero. We prove that such an assumption effectively eliminates the support shift issue for RMDPs with a TV distance robust set, and present an algorithm with a provable sample complexity guarantee. Our work makes the initial step to uncovering the inherent difficulty of robust RL via interactive data collection and sufficient conditions for designing a sample-efficient algorithm accompanied by sharp sample complexity analysis.
4/5/2024