Drone-assisted Road Gaussian Splatting with Cross-view Uncertainty

0

Sign in to get full access
Overview
- This paper presents a novel approach for drone-assisted road reconstruction using Gaussian splatting and cross-view uncertainty estimation.
- The method leverages drone-captured images to create a dense 3D representation of road surfaces, accounting for uncertainty across different viewpoints.
- The proposed technique aims to improve the accuracy and reliability of autonomous driving systems by providing a detailed and robust road model.
Plain English Explanation
The research paper describes a new way to use drones to help create detailed 3D models of roads. These 3D road models are important for self-driving cars, as they need very accurate information about the road surface to drive safely.
The key idea is to use Gaussian splatting - a technique that represents 3D points as "splats" or blobs, rather than individual points. This helps deal with the noisy and incomplete data that drones typically capture.
Additionally, the method estimates the uncertainty in the 3D road model by comparing data from different viewpoints captured by the drone. This cross-view uncertainty information can then be used to improve the overall quality and reliability of the 3D road reconstruction.
The goal is to create high-quality 3D road models that self-driving cars can use to navigate safely, even in challenging environments. This is an important step in making autonomous driving technology more robust and trustworthy.
Technical Explanation
The paper proposes a drone-assisted road reconstruction approach that uses Gaussian splatting and cross-view uncertainty estimation.
The key components of the method are:
-
Drone Data Capture: The system utilizes drone-captured RGB-D images to obtain a dense 3D point cloud of the road surface.
-
Gaussian Splatting: The 3D points are represented as Gaussian splats, which allows for better handling of noisy and incomplete data compared to traditional point cloud representations.
-
Cross-view Uncertainty Estimation: The method estimates the uncertainty in the 3D road model by comparing the Gaussian splats from different viewpoints captured by the drone. This cross-view uncertainty information is then incorporated into the final road reconstruction.
-
Road Surface Reconstruction: The Gaussian splats and their associated uncertainty estimates are used to create a dense and reliable 3D representation of the road surface, which can be leveraged by autonomous driving systems.
The authors evaluate their approach on several real-world datasets and demonstrate significant improvements in the accuracy and robustness of the reconstructed 3D road models compared to existing methods. This enhanced road surface reconstruction can potentially lead to more reliable and safer autonomous driving experiences.
Critical Analysis
The paper presents a well-designed and thorough approach to drone-assisted road reconstruction. The key strengths include:
- Leveraging Drone Data: The use of drone-captured data enables a dense 3D representation of the road surface, which is crucial for autonomous driving applications.
- Gaussian Splatting: The Gaussian splat representation helps address the challenges of noisy and incomplete point cloud data, a common issue with drone-based sensing.
- Cross-view Uncertainty Estimation: Accounting for uncertainty across different viewpoints is an important contribution, as it can improve the overall reliability of the 3D road model.
However, the paper also acknowledges some limitations:
- Environmental Factors: The performance of the method may be affected by factors such as weather conditions, lighting, and terrain complexity, which could introduce additional sources of uncertainty.
- Computational Complexity: The Gaussian splatting and uncertainty estimation processes may be computationally intensive, potentially limiting the real-time performance of the system.
- Sensor Limitations: The accuracy of the final 3D road model is inherently limited by the capabilities of the drone-mounted sensors, which could be further improved with more advanced hardware.
Future research could explore ways to address these limitations, such as incorporating additional sensor modalities, developing more efficient computational algorithms, and investigating the robustness of the method under diverse environmental conditions.
Conclusion
The proposed drone-assisted road Gaussian splatting with cross-view uncertainty estimation represents a significant advancement in the field of autonomous driving scene reconstruction. By leveraging drone data and incorporating uncertainty information, the method can create highly detailed and reliable 3D road models that are crucial for the safe and robust operation of self-driving vehicles.
The researchers have demonstrated the efficacy of their approach through extensive experimentation, and the potential implications of this work extend beyond just autonomous driving, as accurate 3D road representations can also benefit urban planning, infrastructure management, and various other applications that require a detailed understanding of the road network.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Drone-assisted Road Gaussian Splatting with Cross-view Uncertainty
Saining Zhang, Baijun Ye, Xiaoxue Chen, Yuantao Chen, Zongzheng Zhang, Cheng Peng, Yongliang Shi, Hao Zhao
Robust and realistic rendering for large-scale road scenes is essential in autonomous driving simulation. Recently, 3D Gaussian Splatting (3D-GS) has made groundbreaking progress in neural rendering, but the general fidelity of large-scale road scene renderings is often limited by the input imagery, which usually has a narrow field of view and focuses mainly on the street-level local area. Intuitively, the data from the drone's perspective can provide a complementary viewpoint for the data from the ground vehicle's perspective, enhancing the completeness of scene reconstruction and rendering. However, training naively with aerial and ground images, which exhibit large view disparity, poses a significant convergence challenge for 3D-GS, and does not demonstrate remarkable improvements in performance on road views. In order to enhance the novel view synthesis of road views and to effectively use the aerial information, we design an uncertainty-aware training method that allows aerial images to assist in the synthesis of areas where ground images have poor learning outcomes instead of weighting all pixels equally in 3D-GS training like prior work did. We are the first to introduce the cross-view uncertainty to 3D-GS by matching the car-view ensemble-based rendering uncertainty to aerial images, weighting the contribution of each pixel to the training process. Additionally, to systematically quantify evaluation metrics, we assemble a high-quality synthesized dataset comprising both aerial and ground images for road scenes.
Read more8/28/2024
0
3D Gaussian Splatting for Large-scale 3D Surface Reconstruction from Aerial Images
YuanZheng Wu, Jin Liu, Shunping Ji
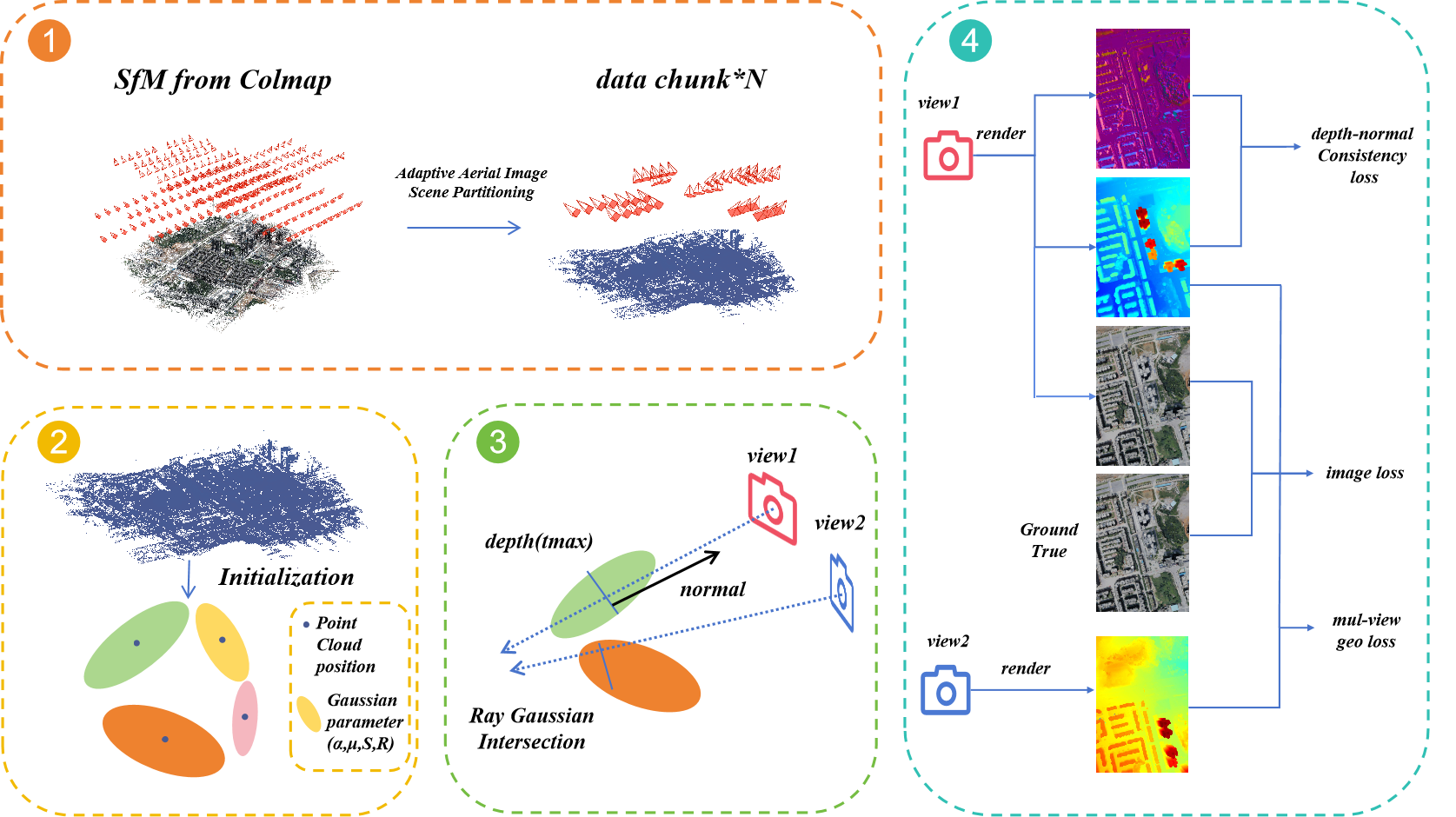
Recently, 3D Gaussian Splatting (3DGS) has garnered significant attention. However, the unstructured nature of 3DGS poses challenges for large-scale surface reconstruction from aerial images. To address this gap, we propose the first large-scale surface reconstruction method for multi-view stereo (MVS) aerial images based on 3DGS, named Aerial Gaussian Splatting (AGS). Initially, we introduce a data chunking method tailored for large-scale aerial imagery, making the modern 3DGS technology feasible for surface reconstruction over extensive scenes. Additionally, we integrate the Ray-Gaussian Intersection method to obtain normal and depth information, facilitating geometric constraints. Finally, we introduce a multi-view geometric consistency constraint to enhance global geometric consistency and improve reconstruction accuracy. Our experiments on multiple datasets demonstrate for the first time that the GS-based technique can match traditional aerial MVS methods on geometric accuracy, and beat state-of-the-art GS-based methods on geometry and rendering quality.
Read more9/9/2024

0
AutoSplat: Constrained Gaussian Splatting for Autonomous Driving Scene Reconstruction
Mustafa Khan, Hamidreza Fazlali, Dhruv Sharma, Tongtong Cao, Dongfeng Bai, Yuan Ren, Bingbing Liu
Realistic scene reconstruction and view synthesis are essential for advancing autonomous driving systems by simulating safety-critical scenarios. 3D Gaussian Splatting excels in real-time rendering and static scene reconstructions but struggles with modeling driving scenarios due to complex backgrounds, dynamic objects, and sparse views. We propose AutoSplat, a framework employing Gaussian splatting to achieve highly realistic reconstructions of autonomous driving scenes. By imposing geometric constraints on Gaussians representing the road and sky regions, our method enables multi-view consistent simulation of challenging scenarios including lane changes. Leveraging 3D templates, we introduce a reflected Gaussian consistency constraint to supervise both the visible and unseen side of foreground objects. Moreover, to model the dynamic appearance of foreground objects, we estimate residual spherical harmonics for each foreground Gaussian. Extensive experiments on Pandaset and KITTI demonstrate that AutoSplat outperforms state-of-the-art methods in scene reconstruction and novel view synthesis across diverse driving scenarios. Visit our project page at https://autosplat.github.io/.
Read more7/8/2024

0
GGS: Generalizable Gaussian Splatting for Lane Switching in Autonomous Driving
Huasong Han, Kaixuan Zhou, Xiaoxiao Long, Yusen Wang, Chunxia Xiao
We propose GGS, a Generalizable Gaussian Splatting method for Autonomous Driving which can achieve realistic rendering under large viewpoint changes. Previous generalizable 3D gaussian splatting methods are limited to rendering novel views that are very close to the original pair of images, which cannot handle large differences in viewpoint. Especially in autonomous driving scenarios, images are typically collected from a single lane. The limited training perspective makes rendering images of a different lane very challenging. To further improve the rendering capability of GGS under large viewpoint changes, we introduces a novel virtual lane generation module into GSS method to enables high-quality lane switching even without a multi-lane dataset. Besides, we design a diffusion loss to supervise the generation of virtual lane image to further address the problem of lack of data in the virtual lanes. Finally, we also propose a depth refinement module to optimize depth estimation in the GSS model. Extensive validation of our method, compared to existing approaches, demonstrates state-of-the-art performance.
Read more9/5/2024