Dynamic Obstacle Avoidance through Uncertainty-Based Adaptive Planning with Diffusion

0

Sign in to get full access
Overview
- Presents a novel method for dynamic obstacle avoidance using uncertainty-based adaptive planning with diffusion
- Aims to enable robots to navigate complex environments with moving obstacles in real-time
- Combines uncertainty estimation, adaptive planning, and diffusion-based optimization to generate safe and efficient trajectories
Plain English Explanation
The paper describes a new approach for enabling robots to navigate through dynamic environments with moving obstacles. The key idea is to combine several techniques to help the robot plan its motion in an uncertain and changing world.
First, the robot uses uncertainty estimation to understand how certain or uncertain it is about the current state of the environment, including the positions and motions of obstacles. This allows the robot to account for imperfect sensor data and unpredictable obstacle movements.
Next, the robot uses adaptive planning to adjust its trajectory in real-time as the environment changes. Rather than planning a single fixed path, the robot continuously updates its plan to respond to new obstacles or changes in the environment.
Finally, the robot uses diffusion-based optimization to efficiently generate safe and efficient trajectories that avoid collisions. Diffusion models can rapidly explore the space of possible paths to find one that navigates around obstacles.
By combining these three key ideas - uncertainty estimation, adaptive planning, and diffusion-based optimization - the researchers developed a system that can enable robots to navigate complex dynamic environments with fast-moving obstacles in real-time. This could have important applications in areas like autonomous vehicles and industrial robotics.
Technical Explanation
The paper presents a novel approach for dynamic obstacle avoidance that uses uncertainty estimation, adaptive planning, and diffusion-based optimization.
First, the system estimates the uncertainty in the robot's perception of the current state of the environment, including the positions and velocities of obstacles. This is done using a neural network that takes in sensor data and outputs a probability distribution over possible obstacle states.
Next, the system uses an adaptive planning algorithm to continuously update the robot's trajectory in response to changes in the environment. Rather than computing a single fixed path, the planner generates a distribution of possible paths and selects the one that best navigates around obstacles while minimizing costs like travel time.
To efficiently explore the space of possible trajectories, the system employs a diffusion-based optimization technique. This involves iteratively perturbing an initial path using a diffusion process to gradually refine it into an optimal solution that avoids collisions.
The paper evaluates this approach through simulation experiments in a variety of dynamic environments with moving obstacles. The results demonstrate that the combined use of uncertainty estimation, adaptive planning, and diffusion optimization allows the robot to navigate safely and efficiently, outperforming baseline methods.
Critical Analysis
The paper makes a compelling case for the effectiveness of the proposed approach, but there are a few potential limitations and areas for further research:
- The experiments were limited to simulated environments, so it's unclear how the system would perform in real-world scenarios with sensor noise, unexpected disturbances, and other real-world challenges.
- The adaptive planning algorithm assumes the robot has full knowledge of the obstacle states, whereas in practice there may be additional uncertainty about the intentions and future motions of dynamic obstacles.
- The diffusion optimization process, while efficient, may struggle to find globally optimal solutions in highly complex environments with many obstacles and constraints.
Further research could explore ways to relax these assumptions, such as by incorporating partial observability, learning obstacle intent models, or hybridizing the diffusion planner with other optimization techniques. Validating the approach on physical robot platforms would also be an important next step.
Overall, this paper presents a promising framework for enabling robust and responsive navigation in dynamic environments, with several avenues for potential improvement and extension.
Conclusion
This paper introduces a novel approach for dynamic obstacle avoidance that combines uncertainty estimation, adaptive planning, and diffusion-based optimization. By accounting for perceptual uncertainty, continuously updating the robot's trajectory, and efficiently exploring the space of possible paths, the system demonstrates the ability to safely navigate complex environments with fast-moving obstacles.
The technical innovations and evaluations described in this work could have important implications for the development of autonomous robots and vehicles capable of operating in dynamic, unstructured environments. Further research to address the identified limitations and extend the approach to real-world scenarios could unlock new capabilities for robotic systems operating in the real world.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Dynamic Obstacle Avoidance through Uncertainty-Based Adaptive Planning with Diffusion
Vineet Punyamoorty, Pascal Jutras-Dub'e, Ruqi Zhang, Vaneet Aggarwal, Damon Conover, Aniket Bera
By framing reinforcement learning as a sequence modeling problem, recent work has enabled the use of generative models, such as diffusion models, for planning. While these models are effective in predicting long-horizon state trajectories in deterministic environments, they face challenges in dynamic settings with moving obstacles. Effective collision avoidance demands continuous monitoring and adaptive decision-making. While replanning at every timestep could ensure safety, it introduces substantial computational overhead due to the repetitive prediction of overlapping state sequences -- a process that is particularly costly with diffusion models, known for their intensive iterative sampling procedure. We propose an adaptive generative planning approach that dynamically adjusts replanning frequency based on the uncertainty of action predictions. Our method minimizes the need for frequent, computationally expensive, and redundant replanning while maintaining robust collision avoidance performance. In experiments, we obtain a 13.5% increase in the mean trajectory length and a 12.7% increase in mean reward over long-horizon planning, indicating a reduction in collision rates and an improved ability to navigate the environment safely.
Read more9/26/2024
0
Diffusion Models as Optimizers for Efficient Planning in Offline RL
Renming Huang, Yunqiang Pei, Guoqing Wang, Yangming Zhang, Yang Yang, Peng Wang, Hengtao Shen
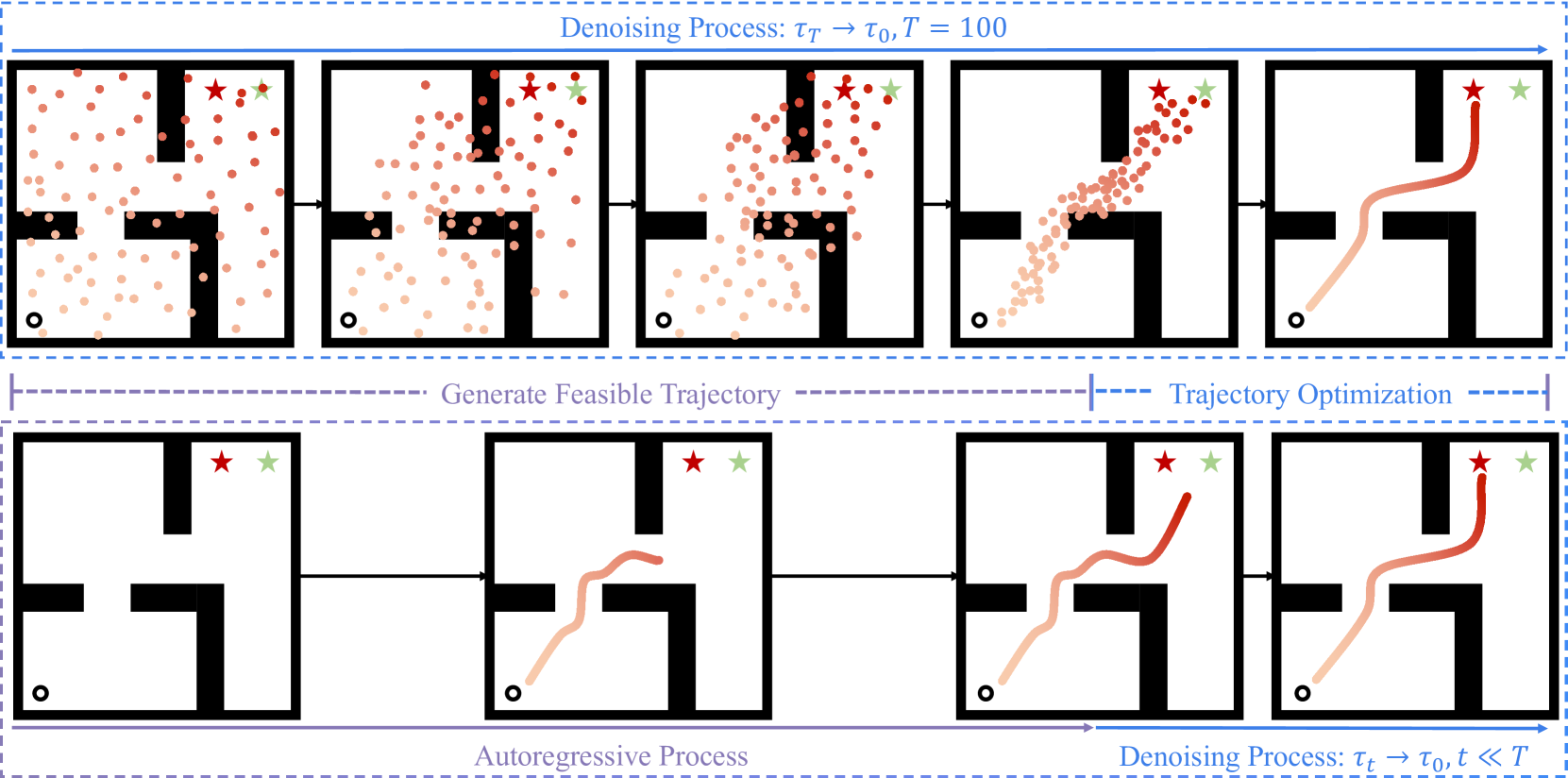
Diffusion models have shown strong competitiveness in offline reinforcement learning tasks by formulating decision-making as sequential generation. However, the practicality of these methods is limited due to the lengthy inference processes they require. In this paper, we address this problem by decomposing the sampling process of diffusion models into two decoupled subprocesses: 1) generating a feasible trajectory, which is a time-consuming process, and 2) optimizing the trajectory. With this decomposition approach, we are able to partially separate efficiency and quality factors, enabling us to simultaneously gain efficiency advantages and ensure quality assurance. We propose the Trajectory Diffuser, which utilizes a faster autoregressive model to handle the generation of feasible trajectories while retaining the trajectory optimization process of diffusion models. This allows us to achieve more efficient planning without sacrificing capability. To evaluate the effectiveness and efficiency of the Trajectory Diffuser, we conduct experiments on the D4RL benchmarks. The results demonstrate that our method achieves $it 3$-$it 10 times$ faster inference speed compared to previous sequence modeling methods, while also outperforming them in terms of overall performance. https://github.com/RenMing-Huang/TrajectoryDiffuser Keywords: Reinforcement Learning and Efficient Planning and Diffusion Model
Read more7/24/2024

0
CoBL-Diffusion: Diffusion-Based Conditional Robot Planning in Dynamic Environments Using Control Barrier and Lyapunov Functions
Kazuki Mizuta, Karen Leung
Equipping autonomous robots with the ability to navigate safely and efficiently around humans is a crucial step toward achieving trusted robot autonomy. However, generating robot plans while ensuring safety in dynamic multi-agent environments remains a key challenge. Building upon recent work on leveraging deep generative models for robot planning in static environments, this paper proposes CoBL-Diffusion, a novel diffusion-based safe robot planner for dynamic environments. CoBL-Diffusion uses Control Barrier and Lyapunov functions to guide the denoising process of a diffusion model, iteratively refining the robot control sequence to satisfy the safety and stability constraints. We demonstrate the effectiveness of the proposed model using two settings: a synthetic single-agent environment and a real-world pedestrian dataset. Our results show that CoBL-Diffusion generates smooth trajectories that enable the robot to reach goal locations while maintaining a low collision rate with dynamic obstacles.
Read more6/11/2024
💬
0
DREAM: Decentralized Real-time Asynchronous Probabilistic Trajectory Planning for Collision-free Multi-Robot Navigation in Cluttered Environments
Bask{i}n c{S}enbac{s}lar, Gaurav S. Sukhatme
Collision-free navigation in cluttered environments with static and dynamic obstacles is essential for many multi-robot tasks. Dynamic obstacles may also be interactive, i.e., their behavior varies based on the behavior of other entities. We propose a novel representation for interactive behavior of dynamic obstacles and a decentralized real-time multi-robot trajectory planning algorithm allowing inter-robot collision avoidance as well as static and dynamic obstacle avoidance. Our planner simulates the behavior of dynamic obstacles, accounting for interactivity. We account for the perception inaccuracy of static and prediction inaccuracy of dynamic obstacles. We handle asynchronous planning between teammates and message delays, drops, and re-orderings. We evaluate our algorithm in simulations using 25400 random cases and compare it against three state-of-the-art baselines using 2100 random cases. Our algorithm achieves up to 1.68x success rate using as low as 0.28x time in single-robot, and up to 2.15x success rate using as low as 0.36x time in multi-robot cases compared to the best baseline. We implement our planner on real quadrotors to show its real-world applicability.
Read more5/21/2024