Dynamic Risk Assessment Methodology with an LDM-based System for Parking Scenarios
2404.04040
0
0
Abstract
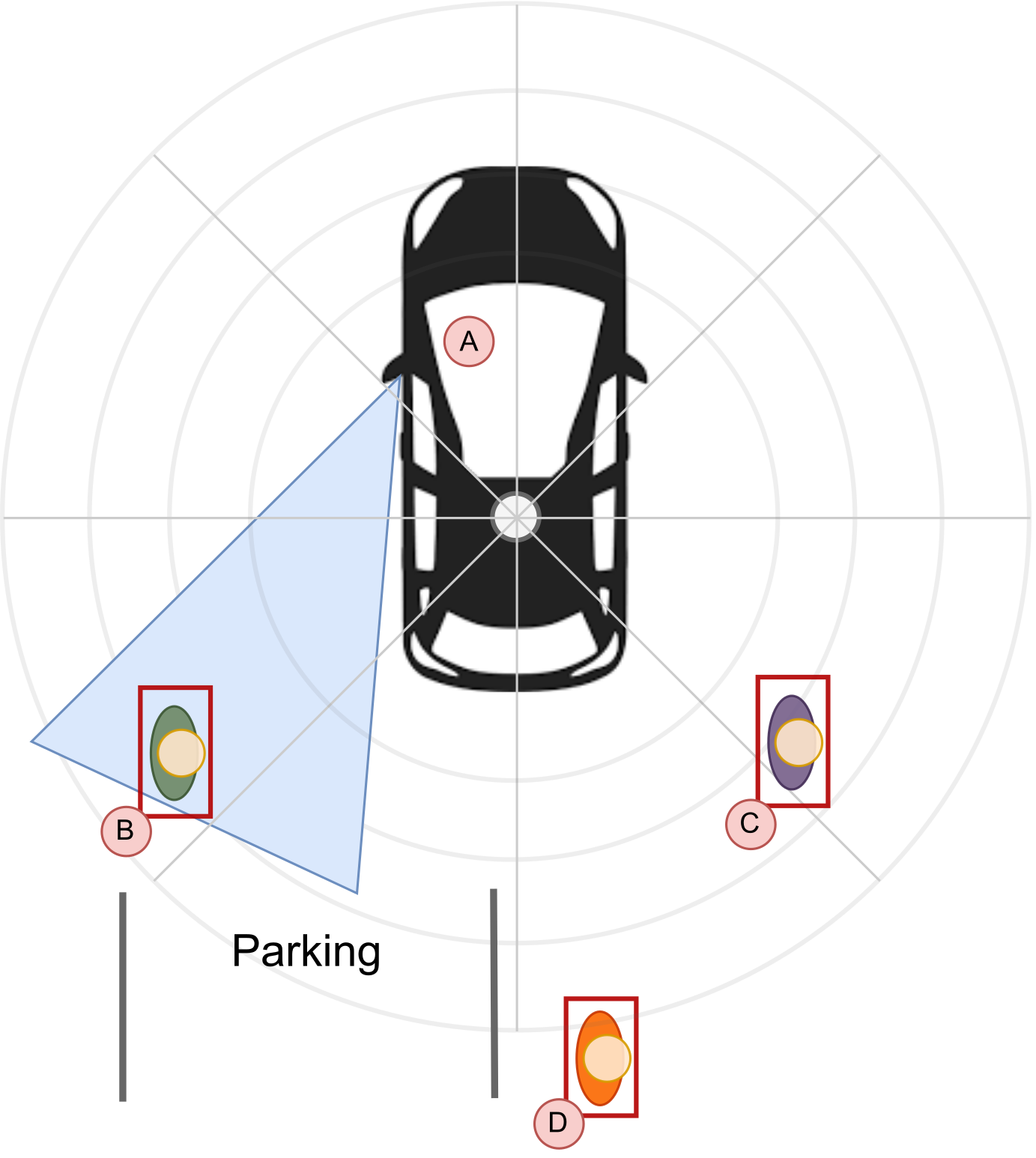
This paper describes the methodology for building a dynamic risk assessment for ADAS (Advanced Driving Assistance Systems) algorithms in parking scenarios, fusing exterior and interior perception for a better understanding of the scene and a more comprehensive risk estimation. This includes the definition of a dynamic risk methodology that depends on the situation from inside and outside the vehicle, the creation of a multi-sensor dataset of risk assessment for ADAS benchmarking purposes, and a Local Dynamic Map (LDM) that fuses data from the exterior and interior of the car to build an LDM-based Dynamic Risk Assessment System (DRAS).
Create account to get full access
Overview
- This paper proposes a dynamic risk assessment methodology for parking scenarios using an LDM (Layered Decision Model)-based system.
- The methodology aims to improve safety and efficiency in autonomous parking by continuously evaluating and updating risk assessments based on real-time sensor data and environmental factors.
- The system integrates various components, including an LDM, a risk assessment module, and a decision-making module, to enable dynamic risk assessment and informed decision-making for autonomous parking.
Plain English Explanation
The paper discusses a new approach to managing the risks involved in autonomous parking. Autonomous vehicles need to be able to navigate parking lots and spaces safely, and this requires continuously evaluating the risks and making informed decisions. The researchers have developed a system that uses real-time data from sensors to continuously assess the risks in the environment and adjust the vehicle's behavior accordingly.
At the heart of this system is the Layered Decision Model (LDM), which helps the vehicle understand the current situation and make appropriate decisions. The system also includes a risk assessment module that analyzes the sensor data and environmental factors to identify potential hazards or risky situations. Based on this risk assessment, the decision-making module can then adjust the vehicle's behavior to minimize the risks and ensure a safe parking experience.
This dynamic risk assessment approach is intended to improve the safety and efficiency of autonomous parking, which is an important capability for self-driving cars and other autonomous vehicles. By continuously monitoring the environment and adapting their behavior accordingly, these vehicles can navigate parking scenarios more safely and effectively.
Technical Explanation
The researchers have developed a dynamic risk assessment methodology for autonomous parking scenarios that leverages an LDM-based system. The LDM is a key component that allows the vehicle to understand the current situation and make informed decisions.
The system integrates several modules:
- LDM (Layered Decision Model): This module creates a multi-layered representation of the parking environment, including static and dynamic elements, to enable comprehensive situational awareness.
- Risk Assessment Module: This module continuously evaluates the risks in the environment based on sensor data, such as the presence of obstacles, pedestrians, or other vehicles, as well as environmental factors like weather conditions.
- Decision-making Module: This module uses the risk assessment information to make appropriate decisions for the vehicle's behavior, such as adjusting speed, changing trajectory, or triggering safety maneuvers.
The dynamic nature of the risk assessment process allows the system to continuously update the risk profile and adapt the vehicle's behavior accordingly, improving the safety and efficiency of autonomous parking.
Critical Analysis
The researchers have proposed a promising approach to dynamic risk assessment for autonomous parking scenarios. By integrating various components, including an LDM, risk assessment, and decision-making modules, the system aims to enhance the safety and reliability of autonomous parking.
However, the paper does not provide a detailed evaluation of the system's performance or a comparison to other existing approaches. Additional research and real-world testing would be necessary to fully assess the effectiveness and practical application of this methodology.
Furthermore, the paper does not address potential edge cases or scenarios that may challenge the system's ability to accurately assess risks and make appropriate decisions. Exploring the system's robustness and ability to handle unexpected or complex situations would be an important area for future research.
Conclusion
This research presents a dynamic risk assessment methodology for autonomous parking scenarios using an LDM-based system. The proposed approach aims to enhance the safety and efficiency of autonomous parking by continuously evaluating and updating risk assessments based on real-time sensor data and environmental factors.
The integration of the LDM, risk assessment, and decision-making modules shows promise in enabling autonomous vehicles to navigate parking scenarios more safely and adaptively. While further research and evaluation are needed, this work contributes to the ongoing efforts in developing reliable and robust autonomous driving systems.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
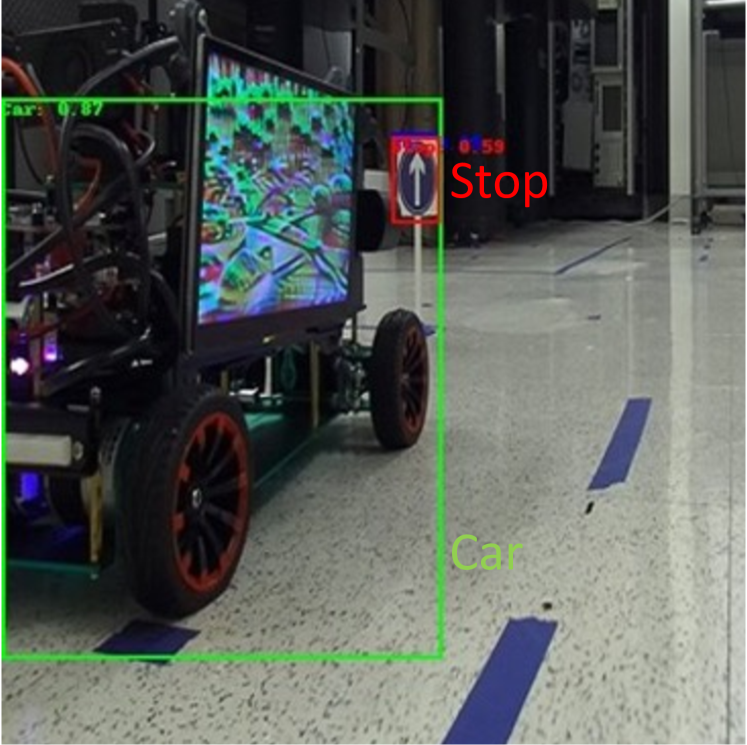
Dynamic Adversarial Attacks on Autonomous Driving Systems
Amirhosein Chahe, Chenan Wang, Abhishek Jeyapratap, Kaidi Xu, Lifeng Zhou
0
0
This paper introduces an attacking mechanism to challenge the resilience of autonomous driving systems. Specifically, we manipulate the decision-making processes of an autonomous vehicle by dynamically displaying adversarial patches on a screen mounted on another moving vehicle. These patches are optimized to deceive the object detection models into misclassifying targeted objects, e.g., traffic signs. Such manipulation has significant implications for critical multi-vehicle interactions such as intersection crossing and lane changing, which are vital for safe and efficient autonomous driving systems. Particularly, we make four major contributions. First, we introduce a novel adversarial attack approach where the patch is not co-located with its target, enabling more versatile and stealthy attacks. Moreover, our method utilizes dynamic patches displayed on a screen, allowing for adaptive changes and movement, enhancing the flexibility and performance of the attack. To do so, we design a Screen Image Transformation Network (SIT-Net), which simulates environmental effects on the displayed images, narrowing the gap between simulated and real-world scenarios. Further, we integrate a positional loss term into the adversarial training process to increase the success rate of the dynamic attack. Finally, we shift the focus from merely attacking perceptual systems to influencing the decision-making algorithms of self-driving systems. Our experiments demonstrate the first successful implementation of such dynamic adversarial attacks in real-world autonomous driving scenarios, paving the way for advancements in the field of robust and secure autonomous driving.
5/16/2024

Model-based generation of representative rear-end crash scenarios across the full severity range using pre-crash data
Jian Wu, Carol Flannagan, Ulrich Sander, Jonas Bargman
0
0
Generating representative rear-end crash scenarios is crucial for safety assessments of Advanced Driver Assistance Systems (ADAS) and Automated Driving systems (ADS). However, existing methods for scenario generation face challenges such as limited and biased in-depth crash data and difficulties in validation. This study sought to overcome these challenges by combining naturalistic driving data and pre-crash kinematics data from rear-end crashes. The combined dataset was weighted to create a representative dataset of rear-end crash characteristics across the full severity range in the United States. Multivariate distribution models were built for the combined dataset, and a driver behavior model for the following vehicle was created by combining two existing models. Simulations were conducted to generate a set of synthetic rear-end crash scenarios, which were then weighted to create a representative synthetic rear-end crash dataset. Finally, the synthetic dataset was validated by comparing the distributions of parameters and the outcomes (Delta-v, the total change in vehicle velocity over the duration of the crash event) of the generated crashes with those in the original combined dataset. The synthetic crash dataset can be used for the safety assessments of ADAS and ADS and as a benchmark when evaluating the representativeness of scenarios generated through other methods.
6/26/2024
An Approach to Systematic Data Acquisition and Data-Driven Simulation for the Safety Testing of Automated Driving Functions
Leon Eisemann, Mirjam Fehling-Kaschek, Henrik Gommel, David Hermann, Marvin Klemp, Martin Lauer, Benjamin Lickert, Florian Luettner, Robin Moss, Nicole Neis, Maria Pohle, Simon Romanski, Daniel Stadler, Alexander Stolz, Jens Ziehn, Jingxing Zhou
0
0
With growing complexity and criticality of automated driving functions in road traffic and their operational design domains (ODD), there is increasing demand for covering significant proportions of development, validation, and verification in virtual environments and through simulation models. If, however, simulations are meant not only to augment real-world experiments, but to replace them, quantitative approaches are required that measure to what degree and under which preconditions simulation models adequately represent reality, and thus, using their results accordingly. Especially in R&D areas related to the safety impact of the open world, there is a significant shortage of real-world data to parameterize and/or validate simulations - especially with respect to the behavior of human traffic participants, whom automated driving functions will meet in mixed traffic. We present an approach to systematically acquire data in public traffic by heterogeneous means, transform it into a unified representation, and use it to automatically parameterize traffic behavior models for use in data-driven virtual validation of automated driving functions.
5/6/2024

Developing, Analyzing, and Evaluating Vehicular Lane Keeping Algorithms Under Dynamic Lighting and Weather Conditions Using Electric Vehicles
Michael Khalfin, Jack Volgren, Matthew Jones, Luke LeGoullon, Joshua Siegel, Chan-Jin Chung
0
0
Self-driving vehicles have the potential to reduce accidents and fatalities on the road. Many production vehicles already come equipped with basic self-driving capabilities, but have trouble following lanes in adverse lighting and weather conditions. Therefore, we develop, analyze, and evaluate two vehicular lane-keeping algorithms under dynamic weather conditions using a combined deep learning- and hand-crafted approach and an end-to-end deep learning approach. We use image segmentation- and linear-regression based deep learning to drive the vehicle toward the center of the lane, measuring the amount of laps completed, average speed, and average steering error per lap. Our hybrid model completes more laps than our end-to-end deep learning model. In the future, we are interested in combining our algorithms to form one cohesive approach to lane-following.
6/12/2024