Dynamic single-input control of multi-state multi-transition soft robotic actuator

0

Sign in to get full access
Overview
- This paper presents a novel approach for dynamically controlling a multi-state, multi-transition soft robotic actuator using a single input.
- The researchers developed a soft robotic actuator that can transition between multiple states and configurations, allowing for greater versatility and adaptability compared to traditional single-state actuators.
- The key innovation is the ability to control this complex actuator using a single input signal, which simplifies the control system and enables more energy-efficient operation.
Plain English Explanation
The researchers have created a special type of robot part, called a soft robotic actuator, that can change its shape and movement in multiple ways using just a single control signal. Typical robot parts can only move in one or two fixed ways, but this new actuator has the flexibility to transition between many different states and configurations.
This allows the robot to adapt and respond to a wider range of tasks and environments. For example, link to "Underactuated control of multiple soft pneumatic actuators via" a robot hand made with this type of actuator could grip objects of different shapes and sizes more easily. Or a link to "Leveraging natural load dynamics for variable gear ratio" robot leg could adjust its stiffness to walk efficiently on different terrains.
The key innovation is that the researchers figured out how to control all these complex motions using just a single control signal, like a dial or button. This makes the control system much simpler and more energy-efficient compared to using multiple separate control signals. It's a bit like being able to control the movements of a five-fingered hand with a single joystick, rather than having to control each finger individually.
Technical Explanation
The researchers developed a soft robotic actuator with multiple stable states and transition pathways between them. This was achieved through a novel link to "Optimized design of soft actuator considering force/torque and bendability" actuator design incorporating multiple internal chambers that can be selectively pressurized.
By carefully controlling the pressure in these chambers, the actuator can transition between different configurations - for example, bending to the left, bending to the right, twisting, or extending. Importantly, the researchers found that these transitions could be induced using a single control input (e.g. a variable pressure supply), rather than requiring multiple independent control signals.
This was enabled by leveraging the natural dynamics and nonlinearities inherent in the soft robotic system. The researchers link to "Design and control of a compact series elastic actuator module" developed a detailed model to predict and control the actuator's multi-state behavior using this single-input approach. Experimental testing validated the model and demonstrated the versatility of the actuator in performing diverse motions.
Critical Analysis
The researchers acknowledge that the current implementation is limited to relatively simple multi-state behaviors, and further work is needed to expand the complexity and range of motions. Additionally, the reliance on a variable pressure supply may limit the scalability and portability of the approach for real-world robotic applications.
Some open questions remain around the robustness and repeatability of the transitions, as well as the energy efficiency compared to alternative control strategies. link to "Adaptive stiffness in a biomimetic robotic system based on tensegrity" Further research could explore incorporating learning-based approaches to improve the reliability and adaptability of the single-input control.
Overall, this work represents an important step forward in soft robotics by demonstrating the potential for simplified, energy-efficient control of complex multi-state actuators. The insights gained could inform the design of more versatile and adaptive robotic systems for a wide range of applications.
Conclusion
This paper presents a novel approach for dynamically controlling a multi-state, multi-transition soft robotic actuator using a single input signal. The key innovation is the ability to leverage the inherent nonlinearities and dynamics of the soft robotic system to enable simplified control compared to traditional methods.
The researchers demonstrated the feasibility of this approach through detailed modeling, simulation, and experimental validation. While the current implementation is limited, the insights gained could inspire further advances in soft robotics, leading to more versatile, energy-efficient, and adaptable robotic systems. As the field continues to evolve, techniques like this single-input control of multi-state actuators may play an important role in realizing the full potential of soft robotics.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Dynamic single-input control of multi-state multi-transition soft robotic actuator
Geron Yamit, Ben-Haim Eran, Gat D. Amir, Or Yizhar, Givli Sefi
Soft robotics is an attractive and rapidly emerging field, in which actuation is coupled with the elastic response of the robot's structure to achieve complex deformation patterns. A crucial challenge is the need for multiple control inputs, which adds significant complication to the system. We propose a novel concept of single-input control of an actuator composed of interconnected bi-stable elements. Dynamic response of the actuator and pre-designed differences between the elements are exploited to facilitate any desired multi-state transition, using a single dynamic input. We show formulation and analysis of the control system's dynamics and pre-design of its multiple equilibrium states, as well as their stability. Then we fabricate and demonstrate experimentally on single-input control of two- and four-element actuators, where the latter can achieve transitions between up to 48 desired states. Our work paves the way for next-generation soft robotic actuators with minimal actuation and maximal dexterity.
Read more7/23/2024

0
Embodying Control in Soft Multistable Grippers from morphofunctional co-design
Juan C. Osorio (School of Mechanical Engineering, Purdue University, West Lafayette, USA), Jhonatan S. Rincon (School of Mechanical Engineering, Purdue University, West Lafayette, USA), Harith Morgan (School of Mechanical Engineering, Purdue University, West Lafayette, USA), Andres F. Arrieta (School of Mechanical Engineering, Purdue University, West Lafayette, USA)
Soft robots are distinguished by their flexible and adaptable, allowing them to perform tasks that are nearly impossible for rigid robots. However, controlling their configuration is challenging due to their nonlinear material response and infinite deflection degrees of freedom. A potential solution is to discretize the infinite-dimensional configuration space of soft robots into a finite but sufficiently large number of functional shapes. This study explores a co-design strategy for pneumatically actuated soft grippers with multiple encoded stable states, enabling desired functional shape and stiffness reconfiguration. An energy based analytical model for soft multistable grippers is presented, mapping the robots' infinite-dimensional configuration space into discrete stable states, allowing for prediction of the systems final state and dynamic behavior. Our approach introduces a general method to capture the soft robots' response with the lattice lumped parameters using automatic relevance determination regression, facilitating inverse co-design. The resulting computationally efficient model enables us to explore the configuration space in a tractable manner, allowing the inverse co-design of our robots by setting desired targeted positions with optimized stiffness of the set targets. This strategy offers a framework for controlling soft robots by exploiting the nonlinear mechanics of multistable structures, thus embodying mechanical intelligence into soft structures.
Read more7/12/2024
0
Underactuated Control of Multiple Soft Pneumatic Actuators via Stable Inversion
Wu-Te Yang, Burak Kurkcu, Masayoshi Tomizuka
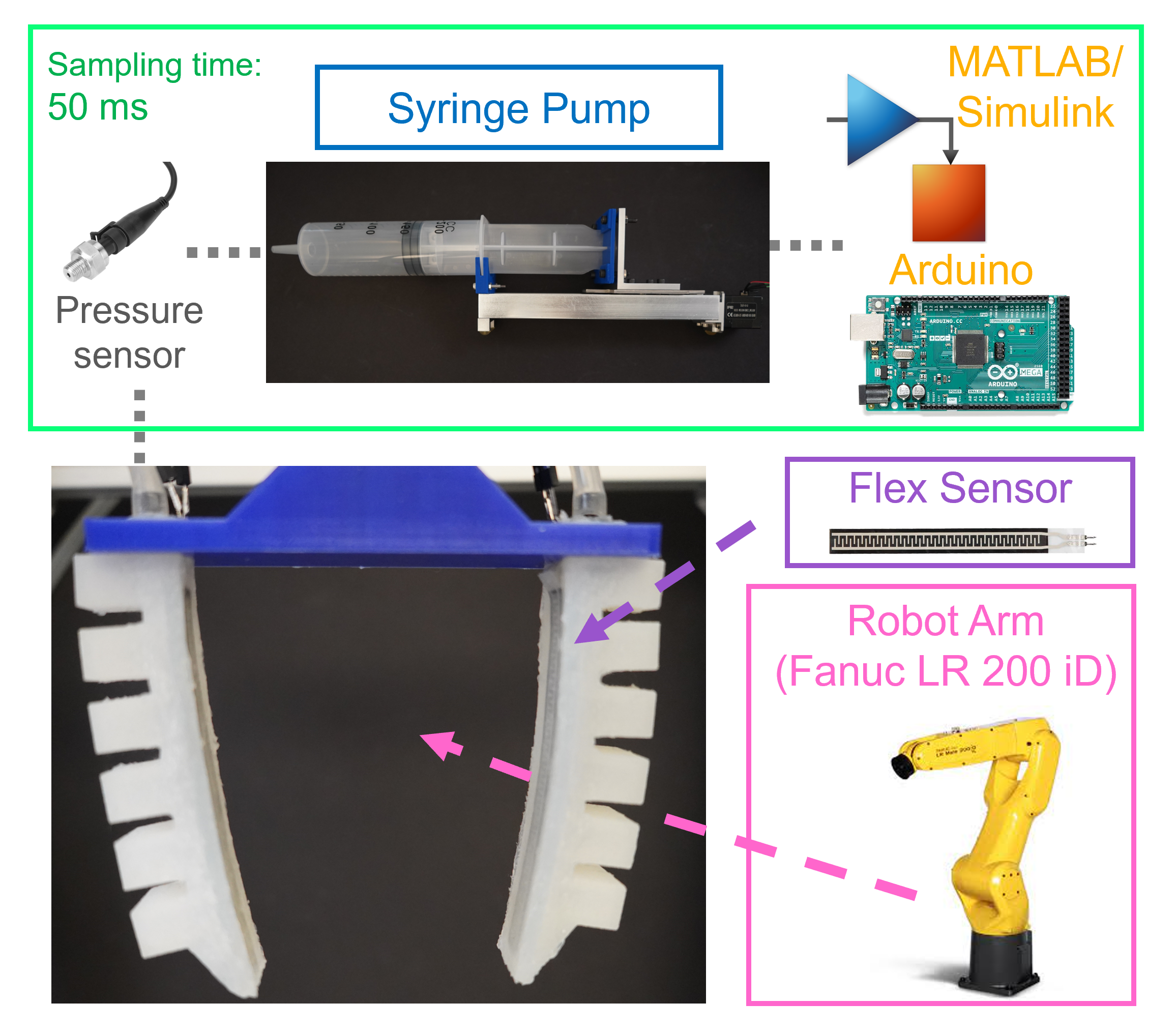
Soft grippers, with their inherent compliance and adaptability, show advantages for delicate and versatile manipulation tasks in robotics. This paper presents a novel approach to underactuated control of multiple soft actuators, specifically focusing on the synchronization of soft fingers within a soft gripper. Utilizing a single syringe pump as the actuation mechanism, we address the challenge of coordinating multiple degrees of freedom of a compliant system. The theoretical framework applies concepts from stable inversion theory, adapting them to the unique dynamics of the underactuated soft gripper. Through meticulous mechatronic system design and controller synthesis, we demonstrate both in simulation and experimentation the efficacy and applicability of our approach in achieving precise and synchronized manipulation tasks. Our findings not only contribute to the advancement of soft robot control but also offer practical insights into the design and control of underactuated systems for real-world applications.
Read more6/10/2024

0
Adaptive Artificial Time Delay Control for Robotic Systems
Swati Dantu
Artificial time delay controller was conceptualised for nonlinear systems to reduce dependency on precise system modelling unlike the conventional adaptive and robust control strategies. In this approach unknown dynamics is compensated by using input and state measurements collected at immediate past time instant (i.e., artificially delayed). The advantage of this kind of approach lies in its simplicity and ease of implementation. However, the applications of artificial time delay controllers in robotics, which are also robust against unknown state-dependent uncertainty, are still missing at large. This thesis presents the study of this control approach toward two important classes of robotic systems, namely a fully actuated bipedal walking robot and an underactuated quadrotor system. In the first work, we explore the idea of a unified control design instead of multiple controllers for different walking phases in adaptive bipedal walking control while bypassing computing constraint forces, since they often lead to complex designs. The second work focuses on quadrotors employed for applications such as payload delivery, inspection and search-and-rescue. The effectiveness of this controller is validated using experimental results.
Read more9/4/2024