DynaMo: In-Domain Dynamics Pretraining for Visuo-Motor Control

0

Sign in to get full access
Overview
- This paper introduces DynaMo, a novel method for pretraining vision-based control policies using in-domain dynamics models.
- The key idea is to leverage a model of the dynamics of a particular domain (e.g., robotic manipulation) to improve the performance and sample efficiency of downstream visuo-motor control tasks.
- Experiments on a diverse set of challenging robotic manipulation tasks demonstrate the effectiveness of DynaMo compared to other pretraining approaches.
Plain English Explanation
The paper presents a new technique called DynaMo that aims to improve the performance and efficiency of vision-based control systems, such as those used in robotic manipulation tasks. The core idea is to first train a model that can accurately simulate the dynamics of a particular domain, like how objects move and interact in a robotic environment. This dynamics model is then used to pretrain the control policy, giving it a head start on understanding the underlying physics of the task before being deployed in the real world.
The researchers show that this in-domain dynamics pretraining approach leads to better-performing and more sample-efficient control policies compared to other pretraining methods, such as those based on imitation learning or self-supervised learning. This is because the dynamics model provides the control policy with valuable inductive biases about the underlying physics of the task, which helps it learn more effectively from limited data.
Technical Explanation
The key technical innovation in DynaMo is the use of in-domain dynamics pretraining to improve the performance of vision-based control policies. The authors first train a dynamics model that can accurately simulate the motion and interactions of objects in the target domain, such as a robotic manipulation environment. This dynamics model is then used to pretrain the control policy, which takes visual observations as input and outputs actions to control the system.
The pretraining process involves having the control policy predict the future states of the system given its current visual observation and a candidate action. By training the policy to accurately model the underlying dynamics, it gains a deep understanding of the physical constraints and regularities of the domain, which can then be leveraged to perform better on downstream control tasks.
The authors evaluate DynaMo on a diverse set of challenging robotic manipulation tasks, including deformable object control and dynamic ball catching. The results demonstrate that DynaMo outperforms other pretraining approaches, such as imitation learning and self-supervised learning, in terms of both sample efficiency and final performance.
Critical Analysis
The authors provide a thorough evaluation of DynaMo, demonstrating its effectiveness across a diverse set of challenging robotic manipulation tasks. However, the paper does not address several potential limitations and areas for further research:
- Generalization to new domains: While DynaMo shows strong performance on the evaluated tasks, it is unclear how well the dynamics model and pretrained control policy would generalize to significantly different domains or task distributions.
- Model limitations: The paper does not discuss the potential limitations of the dynamics model itself, such as its ability to accurately capture complex physical interactions or handle uncertainty in the environment.
- Computational and memory requirements: Pretraining a separate dynamics model and then using it to pretrain the control policy may incur significant computational and memory overhead, which could limit the scalability of the approach.
Further research could explore ways to address these limitations, such as developing more flexible and generalizable dynamics models, or investigating techniques to integrate the dynamics model more seamlessly into the control policy training process.
Conclusion
In summary, the DynaMo approach represents an exciting step forward in improving the performance and sample efficiency of vision-based control policies through the use of in-domain dynamics pretraining. By leveraging a model of the underlying physics of the task, DynaMo enables control policies to gain valuable inductive biases that enhance their learning capabilities. The promising results on a diverse set of robotic manipulation tasks suggest that this technique could have a significant impact on the development of more capable and efficient visuo-motor control systems.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
DynaMo: In-Domain Dynamics Pretraining for Visuo-Motor Control
Zichen Jeff Cui, Hengkai Pan, Aadhithya Iyer, Siddhant Haldar, Lerrel Pinto
Imitation learning has proven to be a powerful tool for training complex visuomotor policies. However, current methods often require hundreds to thousands of expert demonstrations to handle high-dimensional visual observations. A key reason for this poor data efficiency is that visual representations are predominantly either pretrained on out-of-domain data or trained directly through a behavior cloning objective. In this work, we present DynaMo, a new in-domain, self-supervised method for learning visual representations. Given a set of expert demonstrations, we jointly learn a latent inverse dynamics model and a forward dynamics model over a sequence of image embeddings, predicting the next frame in latent space, without augmentations, contrastive sampling, or access to ground truth actions. Importantly, DynaMo does not require any out-of-domain data such as Internet datasets or cross-embodied datasets. On a suite of six simulated and real environments, we show that representations learned with DynaMo significantly improve downstream imitation learning performance over prior self-supervised learning objectives, and pretrained representations. Gains from using DynaMo hold across policy classes such as Behavior Transformer, Diffusion Policy, MLP, and nearest neighbors. Finally, we ablate over key components of DynaMo and measure its impact on downstream policy performance. Robot videos are best viewed at https://dynamo-ssl.github.io
Read more9/19/2024

0
Domain Adaptation of Visual Policies with a Single Demonstration
Weiyao Wang, Gregory D. Hager
Deploying machine learning algorithms for robot tasks in real-world applications presents a core challenge: overcoming the domain gap between the training and the deployment environment. This is particularly difficult for visuomotor policies that utilize high-dimensional images as input, particularly when those images are generated via simulation. A common method to tackle this issue is through domain randomization, which aims to broaden the span of the training distribution to cover the test-time distribution. However, this approach is only effective when the domain randomization encompasses the actual shifts in the test-time distribution. We take a different approach, where we make use of a single demonstration (a prompt) to learn policy that adapts to the testing target environment. Our proposed framework, PromptAdapt, leverages the Transformer architecture's capacity to model sequential data to learn demonstration-conditioned visual policies, allowing for in-context adaptation to a target domain that is distinct from training. Our experiments in both simulation and real-world settings show that PromptAdapt is a strong domain-adapting policy that outperforms baseline methods by a large margin under a range of domain shifts, including variations in lighting, color, texture, and camera pose. Videos and more information can be viewed at project webpage: https://sites.google.com/view/promptadapt.
Read more7/25/2024

0
Direct Imitation Learning-based Visual Servoing using the Large Projection Formulation
Sayantan Auddy, Antonio Paolillo, Justus Piater, Matteo Saveriano
Today robots must be safe, versatile, and user-friendly to operate in unstructured and human-populated environments. Dynamical system-based imitation learning enables robots to perform complex tasks stably and without explicit programming, greatly simplifying their real-world deployment. To exploit the full potential of these systems it is crucial to implement closed loops that use visual feedback. Vision permits to cope with environmental changes, but is complex to handle due to the high dimension of the image space. This study introduces a dynamical system-based imitation learning for direct visual servoing. It leverages off-the-shelf deep learning-based perception backbones to extract robust features from the raw input image, and an imitation learning strategy to execute sophisticated robot motions. The learning blocks are integrated using the large projection task priority formulation. As demonstrated through extensive experimental analysis, the proposed method realizes complex tasks with a robotic manipulator.
Read more6/14/2024
0
DeMoBot: Deformable Mobile Manipulation with Vision-based Sub-goal Retrieval
Yuying Zhang, Wenyan Yang, Joni Pajarinen
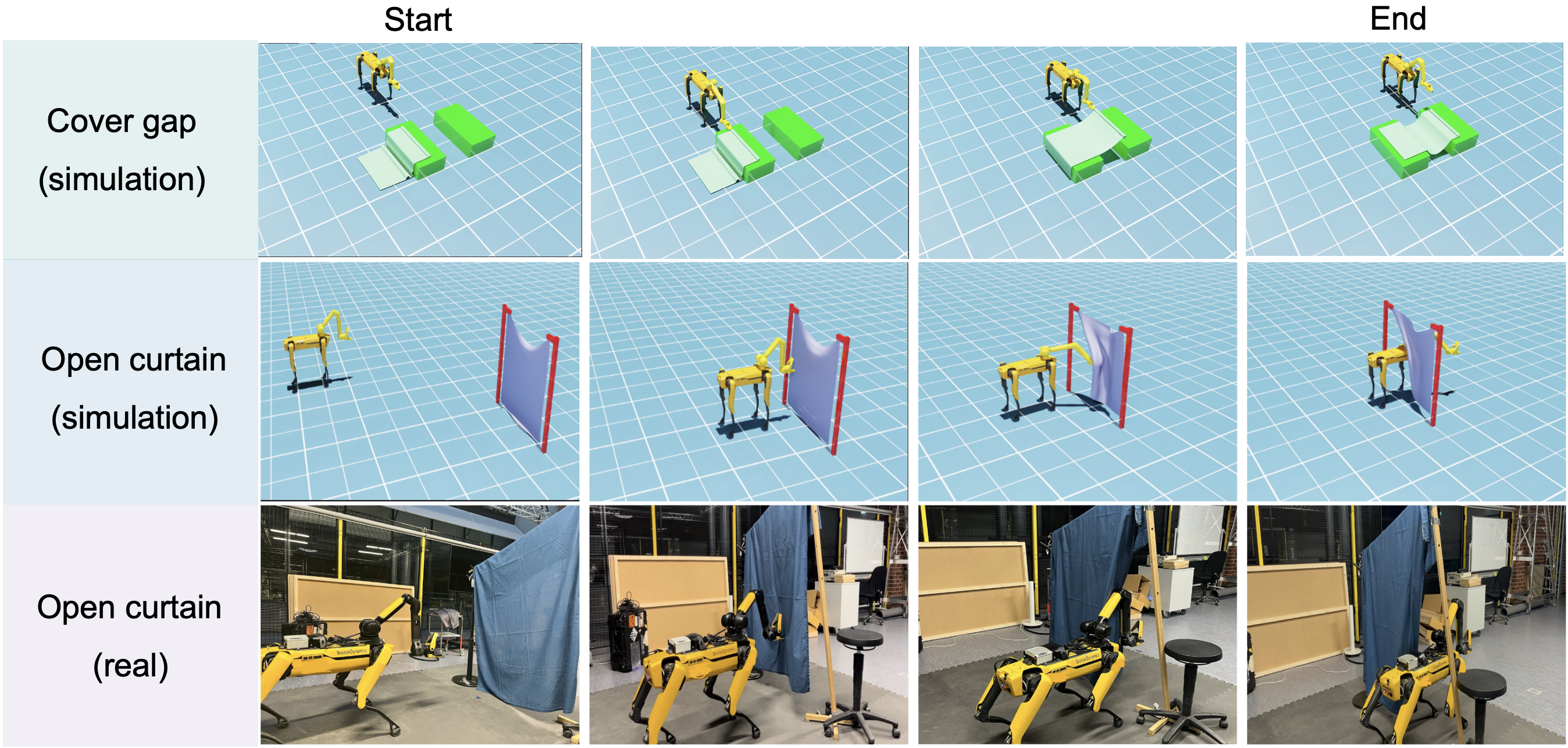
Imitation learning (IL) algorithms typically distill experience into parametric behavior policies to mimic expert demonstrations. Despite their effectiveness, previous methods often struggle with data efficiency and accurately aligning the current state with expert demonstrations, especially in deformable mobile manipulation tasks characterized by partial observations and dynamic object deformations. In this paper, we introduce textbf{DeMoBot}, a novel IL approach that directly retrieves observations from demonstrations to guide robots in textbf{De}formable textbf{Mo}bile manipulation tasks. DeMoBot utilizes vision foundation models to identify relevant expert data based on visual similarity and matches the current trajectory with demonstrated trajectories using trajectory similarity and forward reachability constraints to select suitable sub-goals. Once a goal is determined, a motion generation policy will guide the robot to the next state until the task is completed. We evaluated DeMoBot using a Spot robot in several simulated and real-world settings, demonstrating its effectiveness and generalizability. With only 20 demonstrations, DeMoBot significantly outperforms the baselines, reaching a 50% success rate in curtain opening and 85% in gap covering in simulation.
Read more8/29/2024