Constrained Dynamics Simulation: More With Less

0
⛏️
Sign in to get full access
Overview
- This paper explores techniques for constrained dynamics simulation, aiming to achieve more realistic and efficient simulations with fewer resources.
- Key approaches discussed include leveraging adaptive gait modeling and optimization, efficient learning control, and differentiable dynamic modeling.
- The research also explores sensor-based distributionally robust control for safe robot operation and integrating deep reinforcement learning with robust low-level control.
Plain English Explanation
The paper focuses on improving the realism and efficiency of computer simulations that model the physical dynamics of objects and systems. This is an important area of research, as accurate simulations are crucial for testing and developing new technologies, especially in robotics.
The key idea is to use more advanced mathematical techniques to model the constraints and forces acting on objects in the simulation, rather than relying on brute-force computational power. This allows the simulations to achieve a high level of realism without requiring massive computing resources.
Some of the specific approaches explored in the paper include:
- Adaptive Gait Modeling: Developing models that can automatically adjust the way objects move (their "gait") to be more natural and lifelike, rather than using pre-defined motion patterns.
- Efficient Learning Control: Training simulated systems to learn control policies that are efficient and effective, enabling the simulation to run quickly while still capturing realistic behaviors.
- Differentiable Dynamic Modeling: Using mathematical techniques that allow the simulation to smoothly transition between different physical states, rather than jumping discretely from one state to another.
The paper also looks at ways to make the simulations safer and more robust, such as:
- Sensor-based Distributionally Robust Control: Designing control systems that can adapt to uncertain or changing conditions, keeping the simulated systems stable and under control.
- Integrating Deep Reinforcement Learning: Combining advanced machine learning methods with traditional control theory to create simulations that can learn and adapt on their own.
The overall goal is to create simulations that are highly realistic, efficient, and safe, paving the way for more advanced and impactful applications in fields like robotics, manufacturing, and beyond.
Technical Explanation
The paper presents several novel techniques for improving the realism and efficiency of constrained dynamics simulations. One key approach is adaptive gait modeling and optimization, which allows simulated systems to automatically adjust their motion patterns (or "gaits") to be more natural and lifelike.
Another focus is on efficient learning control frameworks, which train simulated systems to learn control policies that are both effective and computationally efficient. This enables the simulations to run quickly while still capturing realistic behaviors.
The researchers also explore the use of differentiable dynamic modeling techniques, which allow the simulations to transition smoothly between different physical states, rather than discretizing the dynamics.
To enhance the safety and robustness of the simulations, the paper investigates sensor-based distributionally robust control methods. These control systems can adapt to uncertain or changing conditions, keeping the simulated systems stable and under control.
Finally, the researchers demonstrate the integration of deep reinforcement learning approaches with traditional control theory, enabling the simulations to learn and adapt on their own.
Critical Analysis
The paper presents a compelling and comprehensive set of techniques for improving the realism and efficiency of constrained dynamics simulations. The authors have clearly put a significant amount of effort into exploring a wide range of innovative approaches, from adaptive gait modeling to differentiable dynamic modeling.
One potential limitation is the scope of the research, which is quite broad. While this allows the paper to cover a lot of ground, it may also mean that certain aspects are not explored in as much depth as they could be. Additionally, the paper does not provide much detailed information about the specific experimental setups and evaluation metrics used, making it difficult to fully assess the performance and generalizability of the proposed methods.
Another area that could use further investigation is the robustness and safety of the simulations, particularly when dealing with highly uncertain or adversarial conditions. While the paper touches on sensor-based distributionally robust control, there may be additional challenges and considerations that merit deeper exploration.
Overall, the research presented in this paper represents a significant advancement in the field of constrained dynamics simulation, and the techniques described have the potential to enable a wide range of new applications and use cases. However, there is still room for further refinement and exploration to fully realize the potential of this work.
Conclusion
This paper introduces a comprehensive set of techniques for improving the realism and efficiency of constrained dynamics simulations. By leveraging adaptive gait modeling, efficient learning control, differentiable dynamic modeling, sensor-based distributionally robust control, and the integration of deep reinforcement learning, the researchers have developed a powerful toolkit for creating highly realistic and computationally efficient simulations.
The potential impact of this work is significant, as accurate and efficient simulations are crucial for a wide range of applications, from robotics and manufacturing to virtual prototyping and training. By reducing the computational resources required to achieve realistic simulations, the techniques described in this paper could enable new classes of applications and open up new avenues for innovation.
While the paper presents a strong body of work, there are still opportunities for further refinement and exploration, particularly in the areas of robustness, safety, and generalizability. As the field of constrained dynamics simulation continues to evolve, the insights and methods presented in this paper will undoubtedly serve as a valuable foundation for future advancements.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
⛏️
0
Constrained Dynamics Simulation: More With Less
Ajay Suresha Sathya
Efficient robot dynamics simulation is a fundamental problem key for robot control, identification, design and analysis. This research statement explores my current progress in this field and future research directions.
Read more6/3/2024
0
Efficient Computation of Whole-Body Control Utilizing Simplified Whole-Body Dynamics via Centroidal Dynamics
Junewhee Ahn, Jaesug Jung, Yisoo Lee, Hokyun Lee, Sami Haddadin, Jaeheung Park
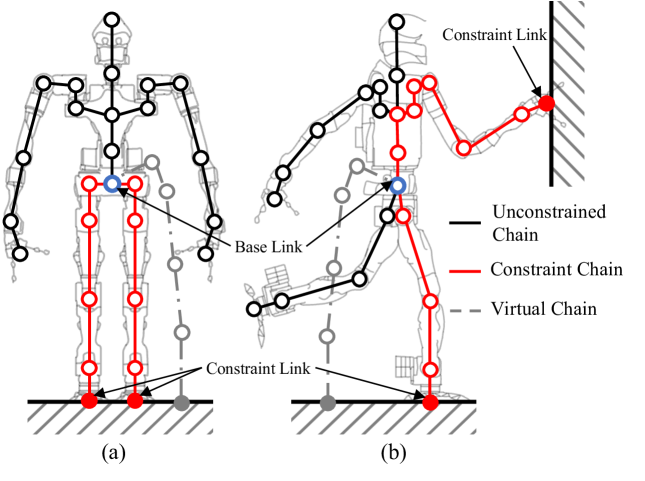
In this study, we present a novel method for enhancing the computational efficiency of whole-body control for humanoid robots, a challenge accentuated by their high degrees of freedom. The reduced-dimension rigid body dynamics of a floating base robot is constructed by segmenting its kinematic chain into constrained and unconstrained chains, simplifying the dynamics of the unconstrained chain through the centroidal dynamics. The proposed dynamics model is possible to be applied to whole-body control methods, allowing the problem to be divided into two parts for more efficient computation. The efficiency of the framework is demonstrated by comparative experiments in simulations. The calculation results demonstrate a significant reduction in processing time, highlighting an improvement over the times reported in current methodologies. Additionally, the results also shows the computational efficiency increases as the degrees of freedom of robot model increases.
Read more9/18/2024
🛠️
0
Towards reliable real-time trajectory optimization
Fatemeh Rastgar
Motion planning is a key aspect of robotics. A common approach to address motion planning problems is trajectory optimization. Trajectory optimization can represent the high-level behaviors of robots through mathematical formulations. However, current trajectory optimization approaches have two main challenges. Firstly, their solution heavily depends on the initial guess, and they are prone to get stuck in local minima. Secondly, they face scalability limitations by increasing the number of constraints. This thesis endeavors to tackle these challenges by introducing four innovative trajectory optimization algorithms to improve reliability, scalability, and computational efficiency. There are two novel aspects of the proposed algorithms. The first key innovation is remodeling the kinematic constraints and collision avoidance constraints. Another key innovation lies in the design of algorithms that effectively utilize parallel computation on GPU accelerators. By using reformulated constraints and leveraging the computational power of GPUs, the proposed algorithms of this thesis demonstrate significant improvements in efficiency and scalability compared to the existing methods. Parallelization enables faster computation times, allowing for real-time decision-making in dynamic environments. Moreover, the algorithms are designed to adapt to changes in the environment, ensuring robust performance. Extensive benchmarking for each proposed optimizer validates their efficacy. Overall, this thesis makes a significant contribution to the field of trajectory optimization algorithms. It introduces innovative solutions that specifically address the challenges faced by existing methods. The proposed algorithms pave the way for more efficient and robust motion planning solutions in robotics by leveraging parallel computation and specific mathematical structures.
Read more8/21/2024

0
End-to-End and Highly-Efficient Differentiable Simulation for Robotics
Quentin Le Lidec, Louis Montaut, Yann de Mont-Marin, Justin Carpentier
Over the past few years, robotics simulators have largely improved in efficiency and scalability, enabling them to generate years of simulated data in a few hours. Yet, efficiently and accurately computing the simulation derivatives remains an open challenge, with potentially high gains on the convergence speed of reinforcement learning and trajectory optimization algorithms, especially for problems involving physical contact interactions. This paper contributes to this objective by introducing a unified and efficient algorithmic solution for computing the analytical derivatives of robotic simulators. The approach considers both the collision and frictional stages, accounting for their intrinsic nonsmoothness and also exploiting the sparsity induced by the underlying multibody systems. These derivatives have been implemented in C++, and the code will be open-sourced in the Simple simulator. They depict state-of-the-art timings ranging from 5 microseconds for a 7-dof manipulator up to 95 microseconds for 36-dof humanoid, outperforming alternative solutions by a factor of at least 100.
Read more9/12/2024