Electrokinetic Propulsion for Electronically Integrated Microscopic Robots

0

Sign in to get full access
Overview
- This paper explores the use of electrokinetic propulsion for microscopic robots integrated with electronic components.
- The research aims to develop a new approach to powering and controlling miniature robots for potential applications in medicine, manufacturing, and environmental monitoring.
- The key focus is on leveraging electrokinetic effects to enable efficient, untethered mobility and integration of electronic functionality within a microscopic scale.
Plain English Explanation
The paper describes a new way to power and control tiny robots using electrokinetic effects. Electrokinetic effects are physical phenomena that occur when an electric field interacts with a fluid, causing movement.
The researchers wanted to harness these effects to create miniature robots that can move around freely without being physically connected to a power source. This could enable the integration of electronic components, sensors, and other functionalities into the tiny robots.
The potential applications include using these robots for medical procedures, manufacturing processes, and environmental monitoring and exploration tasks that are difficult or dangerous for humans to perform. For example, the robots could navigate through the human body to deliver treatments, manipulate tiny components during manufacturing, or gather data from hard-to-reach environmental locations.
Technical Explanation
The paper details the design and testing of an electrokinetically propelled microscopic robot that incorporates electronic components. The robot consists of a conductive shell with an internal circuit and power source.
When an electric field is applied, it interacts with the conductive shell, causing the robot to experience electroosmotic and electrophoretic forces that propel it through a liquid medium. The researchers experimented with different geometries and materials to optimize the robot's speed and maneuverability.
The integrated electronic components allowed the researchers to wirelessly control and power the robot, demonstrating the potential for advanced functionality beyond just locomotion. This included the ability to activate onboard sensors and actuators.
Critical Analysis
The paper presents a promising approach to creating miniature, electronically-enabled robots with untethered mobility. However, the researchers acknowledge several limitations and areas for future work.
For example, the current prototype is relatively large (on the order of millimeters) and operates in a controlled laboratory environment. Scaling down the robots to truly microscopic sizes and ensuring reliable performance in complex, real-world environments will require further research and development.
Additionally, the long-term power supply and heat dissipation challenges associated with integrating electronics at such small scales will need to be addressed. The researchers suggest exploring alternative power sources and cooling mechanisms to enhance the practicality and safety of these microscopic robots.
Conclusion
This paper presents an innovative approach to powering and controlling microscopic robots using electrokinetic effects. The ability to integrate electronic components opens up new possibilities for these robots to perform complex tasks and gather data in hard-to-reach or hazardous environments.
While there are still technical hurdles to overcome, the research demonstrates the potential of this technology to revolutionize fields like medicine, manufacturing, and environmental monitoring. Further advancements in miniaturization, power management, and robustness will be crucial to realizing the full potential of electronically integrated microscopic robots.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Electrokinetic Propulsion for Electronically Integrated Microscopic Robots
Lucas C. Hanson, William H. Reinhardt, Scott Shrager, Tarunyaa Sivakumar, Marc Z. Miskin
Robots too small to see by eye have rapidly evolved in recent years thanks to the incorporation of on-board microelectronics. Semiconductor circuits have been used in microrobots capable of executing controlled wireless steering, prescribed legged gait patterns, and user-triggered transitions between digital states. Yet these promising new capabilities have come at the steep price of complicated fabrication. Even though circuit components can be reliably built by semiconductor foundries, currently available actuators for electronically integrated microrobots are built with intricate multi-step cleanroom protocols and use mechanisms like articulated legs or bubble generators that are hard to design and control. Here, we present a propulsion system for electronically integrated microrobots that can be built with a single step of lithographic processing, readily integrates with microelectronics thanks to low current/low voltage operation (1V, 10nA), and yields robots that swim at speeds over one body length per second. Inspired by work on micromotors, these robots generate electric fields in a surrounding fluid, and by extension propulsive electrokinetic flows. The underlying physics is captured by a model in which robot speed is proportional to applied current, making design and control straightforward. As proof, we build basic robots that use on-board circuits and a closed-loop optical control scheme to navigate waypoints and move in coordinated swarms. Broadly, solid-state propulsion clears the way for robust, easy to manufacture, electronically controlled microrobots that operate reliably over months to years.
Read more9/12/2024
↗️
0
Progress Towards Submersible Microrobots: A Novel 13-mg Low-Power SMA-Based Actuator for Underwater Propulsion
Cody R. Longwell, Conor K. Trygstad, Francisco M. F. R. Goncalves, Ke Xu, Nestor O. Perez-Arancibia
We introduce a new low-power 13-mg microactuator driven by shape-memory alloy (SMA) wires for underwater operation. The development of this device was motivated by the recent creation of microswimmers such as the FRISHBot, WaterStrider, VLEIBot, VLEIBot+, and VLEIBot++. The first four of these robots, ranging from 30 to 90 mg, function tethered to an electrical power supply while the last platform is an 810-mg fully autonomous system. These five robots are driven by dry SMA-based microactuators first developed for microrobotic crawlers such as the SMALLBug and SMARTI. As shown in this abstract, dry SMA-based actuators do not operate efficiently under water due to high heat-transfer rates in this medium; for example, the actuators that drive the VLEIBot++ require about 40 mW of average power at 1 Hz in dry air while requiring about 900 mW of average power at 1 Hz in water. In contrast, the microactuator presented in this abstract consumes about 150 mW of average power at 1 Hz in both dry air and water; additionally, it can be excited directly using an onboard battery through simple power electronics implemented on a custom-built printed circuit board (PCB). This technological breakthrough was enabled by the integration of a soft structure that encapsulates the SMA wires that drive the actuator in order to passively control the rates of heat transfer. The results presented here represent preliminary, yet compelling, experimental evidence that the proposed actuation approach will enable the development of fully autonomous and controllable submersible microswimmers. To accomplish this objective, we will evolve the current version of the VLEIBot++ and introduce new bioinspired underwater propulsion mechanisms.
Read more9/30/2024

0
VLEIBot: A New 45-mg Swimming Microrobot Driven by a Bioinspired Anguilliform Propulsor
Elijah K. Blankenship, Conor K. Trygstad, Francisco M. F. R. Gonc{c}alves, N'estor O. P'erez-Arancibia
This paper presents the VLEIBot^* (Very Little Eel-Inspired roBot), a 45-mg/23-mm^3 microrobotic swimmer that is propelled by a bioinspired anguilliform propulsor. The propulsor is excited by a single 6-mg high-work-density (HWD) microactuator and undulates periodically due to wave propagation phenomena generated by fluid-structure interaction (FSI) during swimming. The microactuator is composed of a carbon-fiber beam, which functions as a leaf spring, and shape-memory alloy (SMA) wires, which deform cyclically when excited periodically using Joule heating. The VLEIBot can swim at speeds as high as 15.1mm * s^{-1} (0.33 Bl * s^{-1}}) when driven with a heuristically-optimized propulsor. To improve maneuverability, we evolved the VLEIBot design into the 90-mg/47-mm^3 VLEIBot^+, which is driven by two propulsors and fully controllable in the two-dimensional (2D) space. The VLEIBot^+ can swim at speeds as high as 16.1mm * s^{-1} (0.35 Bl * s^{-1}), when driven with heuristically-optimized propulsors, and achieves turning rates as high as 0.28 rad * s^{-1}, when tracking path references. The measured root-mean-square (RMS) values of the tracking errors are as low as 4 mm.
Read more9/30/2024
0
Excitable crawling
Juncal Arbelaiz, Alessio Franci, Naomi Ehrich Leonard, Rodolphe Sepulchre, Bassam Bamieh
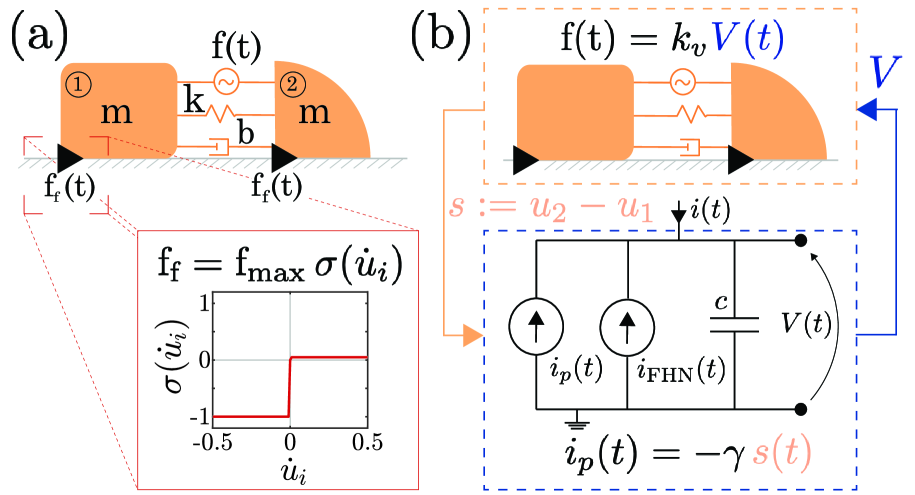
We propose and analyze the suitability of a spiking controller to engineer the locomotion of a soft robotic crawler. Inspired by the FitzHugh-Nagumo model of neural excitability, we design a bistable controller with an electrical flipflop circuit representation capable of generating spikes on-demand when coupled to the passive crawler mechanics. A proprioceptive sensory signal from the crawler mechanics turns bistability of the controller into a rhythmic spiking. The output voltage, in turn, activates the crawler's actuators to generate movement through peristaltic waves. We show through geometric analysis that this control strategy achieves endogenous crawling. The electro-mechanical sensorimotor interconnection provides embodied negative feedback regulation, facilitating locomotion. Dimensional analysis provides insights on the characteristic scales in the crawler's mechanical and electrical dynamics, and how they determine the crawling gait. Adaptive control of the electrical scales to optimally match the mechanical scales can be envisioned to achieve further efficiency, as in homeostatic regulation of neuronal circuits. Our approach can scale up to multiple sensorimotor loops inspired by biological central pattern generators.
Read more6/3/2024