A Multimodal Soft Gripper with Variable Stiffness and Variable Gripping Range Based on MASH Actuator

0
🔗
Sign in to get full access
Overview
- Soft pneumatic actuators with integrated strain limiting layers are common in soft gripper technology.
- However, these grippers have a single gripping functionality and cannot adapt to diverse tasks.
- This paper introduces a novel soft gripper that offers variable stiffness, adjustable gripping range, and multifunctionality.
Plain English Explanation
The paper describes a new type of soft gripper that can handle a wider range of objects compared to traditional soft grippers. Traditional soft grippers use pneumatic actuators with built-in layers that limit how much they can expand. This gives them a fixed gripping range and ability to only perform one type of gripping task.
The new MASH actuator-based soft gripper can adjust its stiffness and gripping range. It can expand up to 3 times more than the original design, allowing it to grab larger objects. It can also increase its stiffness to firmly grip heavy objects. Additionally, the gripper can perform different gripping strategies for various tasks, making it more versatile than traditional soft grippers.
Technical Explanation
The paper presents a novel soft gripper design that leverages MASH (Modular Adaptable Stiffness and grasping Range) actuators. These actuators allow the gripper to:
- Adjust its stiffness to securely handle heavy objects.
- Expand its gripping range up to 3 times compared to the original configuration, enabling it to grasp a wider variety of object sizes.
- Support multifunctional gripping through specific control strategies.
This enhanced functionality is achieved by the unique design of the MASH actuators, which decouple the strain-limiting layer from the main pneumatic chamber. This allows independent control of the gripper's stiffness and gripping range.
Critical Analysis
The paper presents a compelling solution to the limitations of traditional soft grippers. By introducing a variable stiffness and adjustable gripping range, the MASH actuator-based gripper addresses a key challenge in soft robotics - the ability to handle diverse gripping tasks.
However, the paper does not discuss potential drawbacks or limitations of this approach. For example, the complexity of the MASH actuator design may impact the cost, reliability, or ease of manufacturing compared to simpler soft gripper designs. Additionally, the paper does not explore how the gripper's multifunctional gripping capabilities could be implemented in real-world applications.
Further research could investigate the practical implementation challenges, long-term durability, and broader implications of this technology for industrial and consumer applications.
Conclusion
This paper introduces a novel soft gripper design that addresses key limitations of traditional soft grippers. By leveraging MASH actuators, the gripper can adjust its stiffness, expand its gripping range, and perform diverse gripping strategies. This enhanced functionality has the potential to significantly expand the applications of soft robotics in areas such as manufacturing, logistics, and assistive technologies.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
🔗
0
A Multimodal Soft Gripper with Variable Stiffness and Variable Gripping Range Based on MASH Actuator
Dannuo Li, Xuanyi Zhou, Quan Xiong, Chen-Hua Yeow
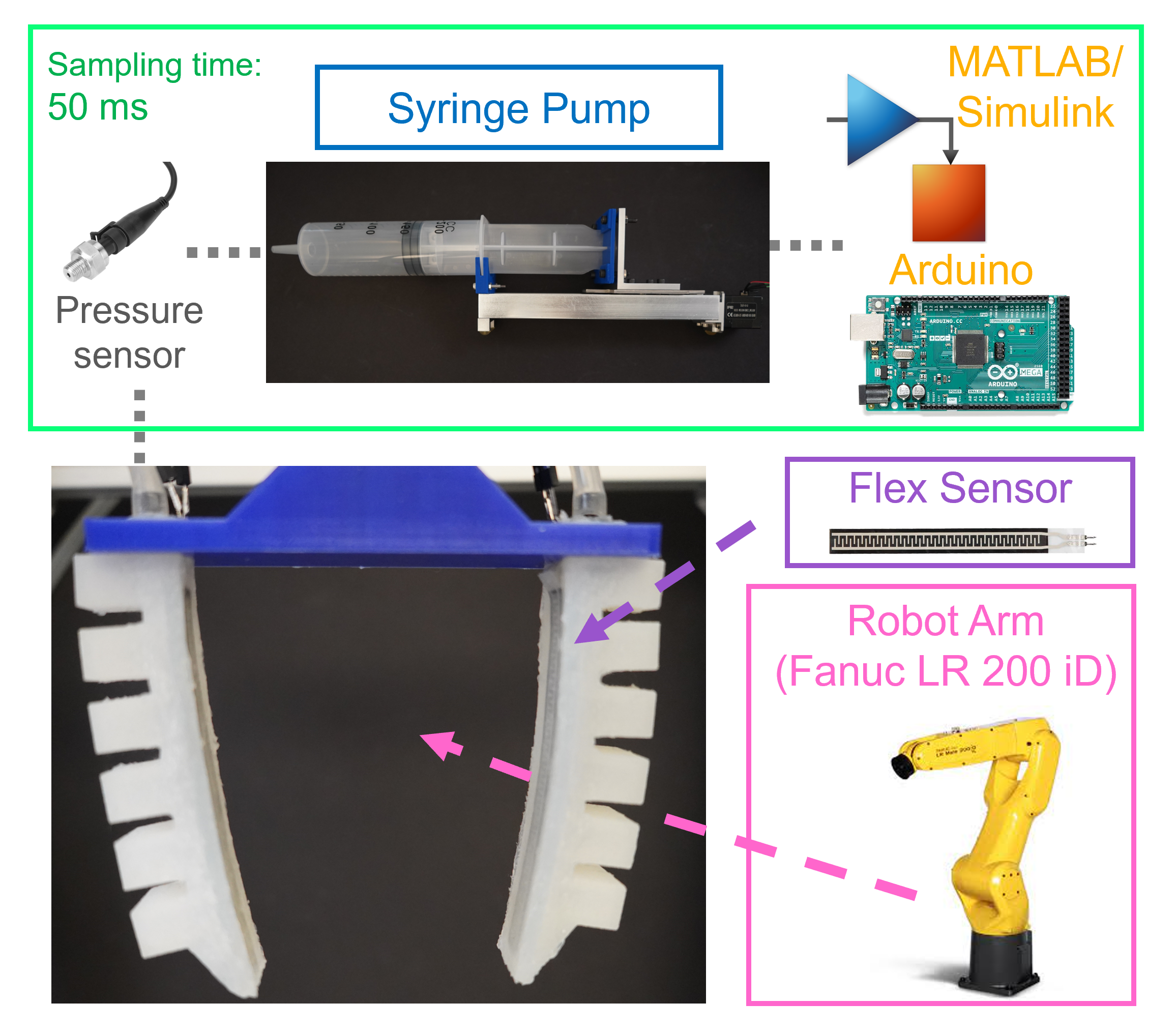
Soft pneumatic actuators with integrated strain limiting layers have emerged as predominant components in the field of soft gripper technology for several decades. However, owing to their intrinsic strain-limiting layer design, these soft grippers possess a singular gripping functionality, rendering them incapable of adapting to diverse gripping tasks with different strategies. Based on our previous work, we introduce a novel soft gripper that offers variable stiffness, an adjustable gripping range, and multifunctionality. The MASH actuator based soft gripper can expand its gripping range up to threefold compared to the original configuration and ensures secure grip by enhancing stiffness when handling heavy objects. Moreover, it supports multitasking gripping through specific gripping strategy control.
Read more8/13/2024

0
Embodying Control in Soft Multistable Grippers from morphofunctional co-design
Juan C. Osorio (School of Mechanical Engineering, Purdue University, West Lafayette, USA), Jhonatan S. Rincon (School of Mechanical Engineering, Purdue University, West Lafayette, USA), Harith Morgan (School of Mechanical Engineering, Purdue University, West Lafayette, USA), Andres F. Arrieta (School of Mechanical Engineering, Purdue University, West Lafayette, USA)
Soft robots are distinguished by their flexible and adaptable, allowing them to perform tasks that are nearly impossible for rigid robots. However, controlling their configuration is challenging due to their nonlinear material response and infinite deflection degrees of freedom. A potential solution is to discretize the infinite-dimensional configuration space of soft robots into a finite but sufficiently large number of functional shapes. This study explores a co-design strategy for pneumatically actuated soft grippers with multiple encoded stable states, enabling desired functional shape and stiffness reconfiguration. An energy based analytical model for soft multistable grippers is presented, mapping the robots' infinite-dimensional configuration space into discrete stable states, allowing for prediction of the systems final state and dynamic behavior. Our approach introduces a general method to capture the soft robots' response with the lattice lumped parameters using automatic relevance determination regression, facilitating inverse co-design. The resulting computationally efficient model enables us to explore the configuration space in a tractable manner, allowing the inverse co-design of our robots by setting desired targeted positions with optimized stiffness of the set targets. This strategy offers a framework for controlling soft robots by exploiting the nonlinear mechanics of multistable structures, thus embodying mechanical intelligence into soft structures.
Read more7/12/2024
0
Underactuated Control of Multiple Soft Pneumatic Actuators via Stable Inversion
Wu-Te Yang, Burak Kurkcu, Masayoshi Tomizuka
Soft grippers, with their inherent compliance and adaptability, show advantages for delicate and versatile manipulation tasks in robotics. This paper presents a novel approach to underactuated control of multiple soft actuators, specifically focusing on the synchronization of soft fingers within a soft gripper. Utilizing a single syringe pump as the actuation mechanism, we address the challenge of coordinating multiple degrees of freedom of a compliant system. The theoretical framework applies concepts from stable inversion theory, adapting them to the unique dynamics of the underactuated soft gripper. Through meticulous mechatronic system design and controller synthesis, we demonstrate both in simulation and experimentation the efficacy and applicability of our approach in achieving precise and synchronized manipulation tasks. Our findings not only contribute to the advancement of soft robot control but also offer practical insights into the design and control of underactuated systems for real-world applications.
Read more6/10/2024

0
Combining and Decoupling Rigid and Soft Grippers to Enhance Robotic Manipulation
Maya Keely, Yeunhee Kim, Shaunak A. Mehta, Joshua Hoegerman, Robert Ramirez Sanchez, Emily Paul, Camryn Mills, Dylan P. Losey, Michael D. Bartlett
For robot arms to perform everyday tasks in unstructured environments, these robots must be able to manipulate a diverse range of objects. Today's robots often grasp objects with either soft grippers or rigid end-effectors. However, purely rigid or purely soft grippers have fundamental limitations: soft grippers struggle with irregular, heavy objects, while rigid grippers often cannot grasp small, numerous items. In this paper we therefore introduce RISOs, a mechanics and controls approach for unifying traditional RIgid end-effectors with a novel class of SOft adhesives. When grasping an object, RISOs can use either the rigid end-effector (pinching the item between non-deformable fingers) and/or the soft materials (attaching and releasing items with switchable adhesives). This enhances manipulation capabilities by combining and decoupling rigid and soft mechanisms. With RISOs robots can perform grasps along a spectrum from fully rigid, to fully soft, to rigid-soft, enabling real time object manipulation across a 1 million times range in weight (from 2 mg to 2 kg). To develop RISOs we first model and characterize the soft switchable adhesives. We then mount sheets of these soft adhesives on the surfaces of rigid end-effectors, and develop control strategies that make it easier for robot arms and human operators to utilize RISOs. The resulting RISO grippers were able to pick-up, carry, and release a larger set of objects than existing grippers, and participants also preferred using RISO. Overall, our experimental and user study results suggest that RISOs provide an exceptional gripper range in both capacity and object diversity. See videos of our user studies here: https://youtu.be/du085R0gPFI
Read more4/23/2024