Enhance Planning with Physics-informed Safety Controllor for End-to-end Autonomous Driving
2405.00316
0
0
🤖
Abstract
Recent years have seen a growing research interest in applications of Deep Neural Networks (DNN) on autonomous vehicle technology. The trend started with perception and prediction a few years ago and it is gradually being applied to motion planning tasks. Despite the performance of networks improve over time, DNN planners inherit the natural drawbacks of Deep Learning. Learning-based planners have limitations in achieving perfect accuracy on the training dataset and network performance can be affected by out-of-distribution problem. In this paper, we propose FusionAssurance, a novel trajectory-based end-to-end driving fusion framework which combines physics-informed control for safety assurance. By incorporating Potential Field into Model Predictive Control, FusionAssurance is capable of navigating through scenarios that are not included in the training dataset and scenarios where neural network fail to generalize. The effectiveness of the approach is demonstrated by extensive experiments under various scenarios on the CARLA benchmark.
Create account to get full access
Overview
- Recent years have seen a growing interest in applying Deep Neural Networks (DNNs) to autonomous vehicle technology, particularly in areas like perception, prediction, and motion planning.
- While DNN-based planners have shown improved performance, they still face inherent limitations of deep learning, such as difficulty achieving perfect accuracy on training data and being affected by out-of-distribution problems.
- The paper proposes a novel "FusionAssurance" framework that combines physics-informed control with DNN-based planning to address these limitations and improve safety.
Plain English Explanation
The paper explores using deep neural networks (DNNs) to help make autonomous vehicles drive themselves. DNNs have been successfully applied to various autonomous vehicle tasks like understanding the environment (perception) and predicting what will happen next (prediction). Now, researchers are also trying to use DNNs for the crucial task of motion planning, which involves figuring out the best way for the vehicle to navigate through its surroundings.
While DNN-based planners have gotten better over time, they still face some inherent challenges with deep learning. For example, they may not achieve perfect accuracy on the data they were trained on, and their performance can suffer when they encounter situations that are different from their training data (out-of-distribution problem).
To address these limitations, the researchers propose a new system called "FusionAssurance." FusionAssurance combines DNN-based planning with a physics-informed control approach that uses "potential fields" to help the vehicle safely navigate even in situations where the neural network might struggle. By blending these two techniques, FusionAssurance aims to take advantage of the strengths of both while overcoming their individual weaknesses.
The researchers test FusionAssurance extensively on the CARLA autonomous driving simulation benchmark, showing that it can successfully navigate a variety of challenging scenarios, including some that the neural network alone could not handle well.
Technical Explanation
The paper introduces a novel trajectory-based end-to-end driving framework called "FusionAssurance" that combines DNN-based planning with physics-informed control for safety assurance. Specifically, the researchers incorporate a Potential Field (PF) module into a Model Predictive Control (MPC) framework to enable the system to navigate through scenarios that are not included in the training dataset or where the neural network fails to generalize.
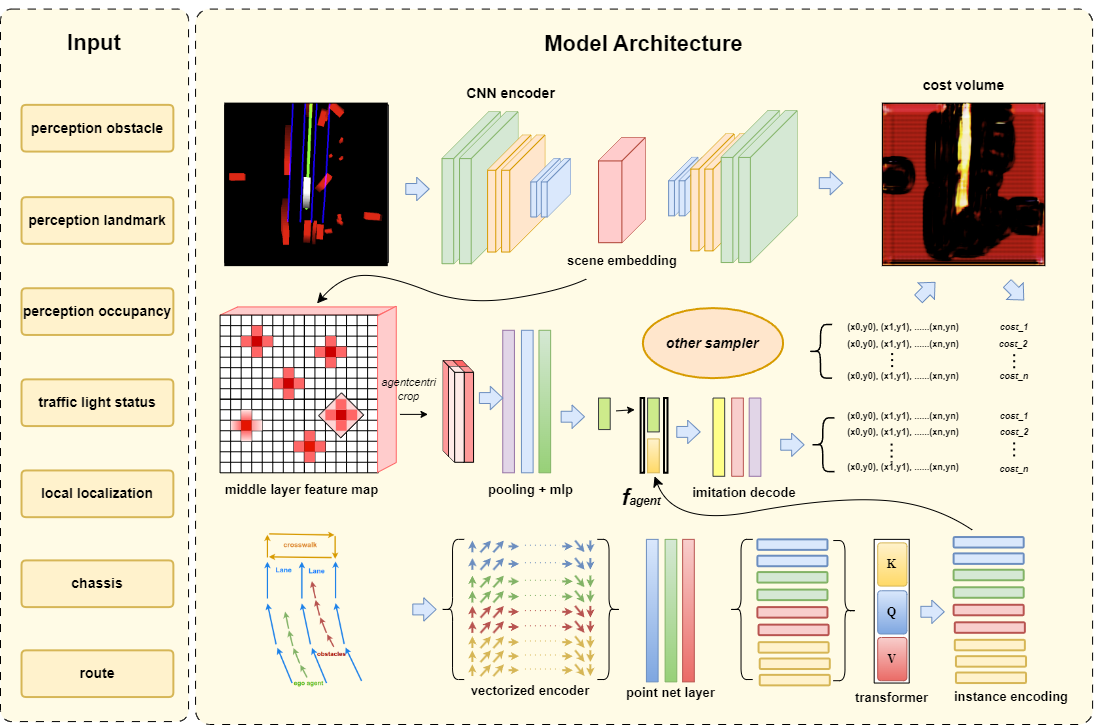
The FusionAssurance architecture consists of several key components:
- A perception module that uses a DNN to understand the vehicle's surroundings.
- A prediction module that forecasts the future behavior of other objects in the environment.
- A motion planning module that combines DNN-based trajectory generation with the PF-augmented MPC controller.
The PF module uses a repulsive force field around obstacles to guide the vehicle away from potentially unsafe areas, even if the DNN-based planner is having trouble. This PF-MPC integration allows FusionAssurance to handle scenarios that are not well represented in the training data, as well as situations where the neural network fails to generalize.
The researchers evaluate FusionAssurance's performance on the CARLA autonomous driving simulation benchmark, comparing it to DNN-only baselines. The results demonstrate that FusionAssurance can effectively navigate a variety of challenging scenarios, including those where the neural network alone struggles.
Critical Analysis
The paper presents a promising approach to address the limitations of DNN-based motion planning for autonomous vehicles. By incorporating physics-informed control through the Potential Field module, FusionAssurance aims to improve safety and robustness in situations where the neural network may not perform well.
However, the paper does not provide a detailed analysis of the specific scenarios or edge cases where the DNN-only planner fails, and how FusionAssurance's hybrid approach addresses these limitations. Additionally, the researchers do not discuss the computational complexity or real-time performance implications of the PF-MPC integration, which could be an important consideration for practical deployment in autonomous vehicles.
Further research could also explore ways to improve the interpretability of the FusionAssurance framework, allowing for better understanding and trust in the system's decision-making process. Investigating the framework's generalization capabilities beyond the CARLA simulation, and assessing its performance on real-world driving data, would also be valuable next steps.
Conclusion
The FusionAssurance framework presented in this paper represents a promising approach to combining the strengths of DNN-based planning with physics-informed control for improved safety and robustness in autonomous vehicle navigation. By incorporating a Potential Field module into the motion planning process, the system can handle a wider range of scenarios, including those not well represented in the training data or where the neural network alone struggles to generalize.
While further research is needed to fully understand the limitations and practical implications of this hybrid approach, the results demonstrated in the CARLA simulation are encouraging and suggest that FusionAssurance could be a valuable contribution to the ongoing development of reliable and safe autonomous driving systems.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
🛠️
Learning to Plan Maneuverable and Agile Flight Trajectory with Optimization Embedded Networks
Zhichao Han, Long Xu, Fei Gao
0
0
In recent times, an increasing number of researchers have been devoted to utilizing deep neural networks for end-to-end flight navigation. This approach has gained traction due to its ability to bridge the gap between perception and planning that exists in traditional methods, thereby eliminating delays between modules. However, the practice of replacing original modules with neural networks in a black-box manner diminishes the overall system's robustness and stability. It lacks principled explanations and often fails to consistently generate high-quality motion trajectories. Furthermore, such methods often struggle to rigorously account for the robot's kinematic constraints, resulting in the generation of trajectories that cannot be executed satisfactorily. In this work, we combine the advantages of traditional methods and neural networks by proposing an optimization-embedded neural network. This network can learn high-quality trajectories directly from visual inputs without the need of mapping, while ensuring dynamic feasibility. Here, the deep neural network is employed to directly extract environment safety regions from depth images. Subsequently, we employ a model-based approach to represent these regions as safety constraints in trajectory optimization. Leveraging the availability of highly efficient optimization algorithms, our method robustly converges to feasible and optimal solutions that satisfy various user-defined constraints. Moreover, we differentiate the optimization process, allowing it to be trained as a layer within the neural network. This approach facilitates the direct interaction between perception and planning, enabling the network to focus more on the spatial regions where optimal solutions exist. As a result, it further enhances the quality and stability of the generated trajectories.
6/10/2024

Planning with Adaptive World Models for Autonomous Driving
Arun Balajee Vasudevan, Neehar Peri, Jeff Schneider, Deva Ramanan
0
0
Motion planning is crucial for safe navigation in complex urban environments. Historically, motion planners (MPs) have been evaluated with procedurally-generated simulators like CARLA. However, such synthetic benchmarks do not capture real-world multi-agent interactions. nuPlan, a recently released MP benchmark, addresses this limitation by augmenting real-world driving logs with closed-loop simulation logic, effectively turning the fixed dataset into a reactive simulator. We analyze the characteristics of nuPlan's recorded logs and find that each city has its own unique driving behaviors, suggesting that robust planners must adapt to different environments. We learn to model such unique behaviors with BehaviorNet, a graph convolutional neural network (GCNN) that predicts reactive agent behaviors using features derived from recently-observed agent histories; intuitively, some aggressive agents may tailgate lead vehicles, while others may not. To model such phenomena, BehaviorNet predicts parameters of an agent's motion controller rather than predicting its spacetime trajectory (as most forecasters do). Finally, we present AdaptiveDriver, a model-predictive control (MPC) based planner that unrolls different world models conditioned on BehaviorNet's predictions. Our extensive experiments demonstrate that AdaptiveDriver achieves state-of-the-art results on the nuPlan closed-loop planning benchmark, reducing test error from 6.4% to 4.6%, even when applied to never-before-seen cities.
6/18/2024

Utilizing Navigation Path to Generate Target Point for Enhanced End-to-End Autonomous Driving Planning
Yuanhua Shen, Jun Li
0
0
In recent years, end-to-end autonomous driving frameworks have been shown to not only enhance perception performance but also improve planning capabilities. However, most previous end-to-end autonomous driving frameworks have primarily focused on enhancing environment perception while neglecting the learning of autonomous vehicle planning intent. Within the end-to-end framework, this paper proposes a method termed NTT, which obtains explicit planning intent through the navigation path. NTT first generates the future target point for the autonomous vehicle based on the navigation path, thereby enhancing planning performance within the end-to-end framework. On one hand, the generation of the target point allows the autonomous vehicle to learn explicit intention from the navigation path, enhancing the practicality of planning. On the other hand, planning trajectory generated based on the target point can adapt more flexibly to environmental changes, thus effectively improving planning safety. We achieved excellent planning performance on the widely used nuScenes dataset and validated the effectiveness of our method through ablation experiments.
6/13/2024
GAD-Generative Learning for HD Map-Free Autonomous Driving
Weijian Sun, Yanbo Jia, Qi Zeng, Zihao Liu, Jiang Liao, Yue Li, Xianfeng Li
0
0
Deep-learning-based techniques have been widely adopted for autonomous driving software stacks for mass production in recent years, focusing primarily on perception modules, with some work extending this method to prediction modules. However, the downstream planning and control modules are still designed with hefty handcrafted rules, dominated by optimization-based methods such as quadratic programming or model predictive control. This results in a performance bottleneck for autonomous driving systems in that corner cases simply cannot be solved by enumerating hand-crafted rules. We present a deep-learning-based approach that brings prediction, decision, and planning modules together with the attempt to overcome the rule-based methods' deficiency in real-world applications of autonomous driving, especially for urban scenes. The DNN model we proposed is solely trained with 10 hours of human driver data, and it supports all mass-production ADAS features available on the market to date. This method is deployed onto a Jiyue test car with no modification to its factory-ready sensor set and compute platform. the feasibility, usability, and commercial potential are demonstrated in this article.
6/3/2024