Learning to Plan Maneuverable and Agile Flight Trajectory with Optimization Embedded Networks
2405.07736
0
0
🛠️
Abstract
In recent times, an increasing number of researchers have been devoted to utilizing deep neural networks for end-to-end flight navigation. This approach has gained traction due to its ability to bridge the gap between perception and planning that exists in traditional methods, thereby eliminating delays between modules. However, the practice of replacing original modules with neural networks in a black-box manner diminishes the overall system's robustness and stability. It lacks principled explanations and often fails to consistently generate high-quality motion trajectories. Furthermore, such methods often struggle to rigorously account for the robot's kinematic constraints, resulting in the generation of trajectories that cannot be executed satisfactorily. In this work, we combine the advantages of traditional methods and neural networks by proposing an optimization-embedded neural network. This network can learn high-quality trajectories directly from visual inputs without the need of mapping, while ensuring dynamic feasibility. Here, the deep neural network is employed to directly extract environment safety regions from depth images. Subsequently, we employ a model-based approach to represent these regions as safety constraints in trajectory optimization. Leveraging the availability of highly efficient optimization algorithms, our method robustly converges to feasible and optimal solutions that satisfy various user-defined constraints. Moreover, we differentiate the optimization process, allowing it to be trained as a layer within the neural network. This approach facilitates the direct interaction between perception and planning, enabling the network to focus more on the spatial regions where optimal solutions exist. As a result, it further enhances the quality and stability of the generated trajectories.
Create account to get full access
Overview
- Researchers are increasingly using deep neural networks for end-to-end flight navigation.
- This approach aims to bridge the gap between perception and planning in traditional methods, but it can diminish the system's robustness and stability.
- The paper proposes an optimization-embedded neural network that combines the advantages of traditional methods and neural networks.
Plain English Explanation
The paper discusses an approach to flight navigation that uses deep neural networks to directly extract information from visual inputs, rather than relying on traditional methods that involve separate modules for mapping and planning. This approach is explored in other papers like PlanNet and Online Spatial-Temporal Graph Trajectory Planner.
The key idea is to combine the strengths of neural networks and traditional optimization-based planning. The neural network is used to identify safe regions in the environment from depth images, and then a model-based optimization approach is used to generate feasible and optimal trajectories that satisfy various constraints, such as the robot's kinematic limits.
This hybrid approach aims to address the limitations of using neural networks as black boxes, which can diminish the system's robustness and stability. By differentiating the optimization process and embedding it within the neural network, the approach allows for direct interaction between perception and planning, enabling the network to focus on the regions where optimal solutions exist. This is intended to enhance the quality and stability of the generated trajectories.
Technical Explanation
The paper proposes an optimization-embedded neural network for end-to-end flight navigation. The neural network is used to directly extract environment safety regions from depth images, without the need for an intermediate mapping step. These safety regions are then represented as constraints in a model-based trajectory optimization process.
By leveraging efficient optimization algorithms, the method can robustly converge to feasible and optimal solutions that satisfy various user-defined constraints, such as the robot's kinematic limits. Importantly, the authors differentiate the optimization process, allowing it to be trained as a layer within the neural network. This facilitates the direct interaction between perception and planning, enabling the network to focus more on the spatial regions where optimal solutions exist.
The authors demonstrate that this approach enhances the quality and stability of the generated trajectories, in contrast to traditional black-box neural network methods that can diminish the overall system's robustness and stability.
Critical Analysis
The paper presents a promising approach that combines the strengths of neural networks and traditional optimization-based planning. By embedding the optimization process within the neural network, the authors address some of the limitations of using neural networks as black boxes, which can struggle to consistently generate high-quality and feasible trajectories.
However, the paper does not provide a detailed analysis of the computational complexity and runtime performance of the proposed method, which could be an important consideration for real-time flight navigation applications. Additionally, the authors mention that the method "robustly converges to feasible and optimal solutions," but they do not provide a rigorous analysis of the convergence properties or the optimality guarantees of the approach.
Further research could explore how this optimization-embedded neural network approach compares to other hybrid methods, such as Physics-Informed Safety Controllers or Knowledge-Informed Graph Neural Planning. Investigating the generalizability of the method to different types of robots and environments would also be valuable.
Conclusion
The paper presents an innovative approach to end-to-end flight navigation that combines the strengths of neural networks and traditional optimization-based planning. By embedding the optimization process within the neural network, the method aims to enhance the quality and stability of the generated trajectories, addressing some of the limitations of black-box neural network approaches.
This hybrid technique could have important implications for the development of more robust and capable autonomous systems, particularly in domains where safety and feasibility are paramount, such as aerial navigation. Further research and real-world testing will be necessary to fully understand the potential of this optimization-embedded neural network approach for practical flight navigation applications.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
🤖
Enhance Planning with Physics-informed Safety Controllor for End-to-end Autonomous Driving
Hang Zhou, Haichao Liu, Hongliang Lu, Dan Xu, Jun Ma, Yiding Ji
0
0
Recent years have seen a growing research interest in applications of Deep Neural Networks (DNN) on autonomous vehicle technology. The trend started with perception and prediction a few years ago and it is gradually being applied to motion planning tasks. Despite the performance of networks improve over time, DNN planners inherit the natural drawbacks of Deep Learning. Learning-based planners have limitations in achieving perfect accuracy on the training dataset and network performance can be affected by out-of-distribution problem. In this paper, we propose FusionAssurance, a novel trajectory-based end-to-end driving fusion framework which combines physics-informed control for safety assurance. By incorporating Potential Field into Model Predictive Control, FusionAssurance is capable of navigating through scenarios that are not included in the training dataset and scenarios where neural network fail to generalize. The effectiveness of the approach is demonstrated by extensive experiments under various scenarios on the CARLA benchmark.
5/7/2024
Trajectory Planning for Autonomous Driving in Unstructured Scenarios Based on Graph Neural Network and Numerical Optimization
Sumin Zhang, Kuo Li, Rui He, Zhiwei Meng, Yupeng Chang, Xiaosong Jin, Ri Bai
0
0
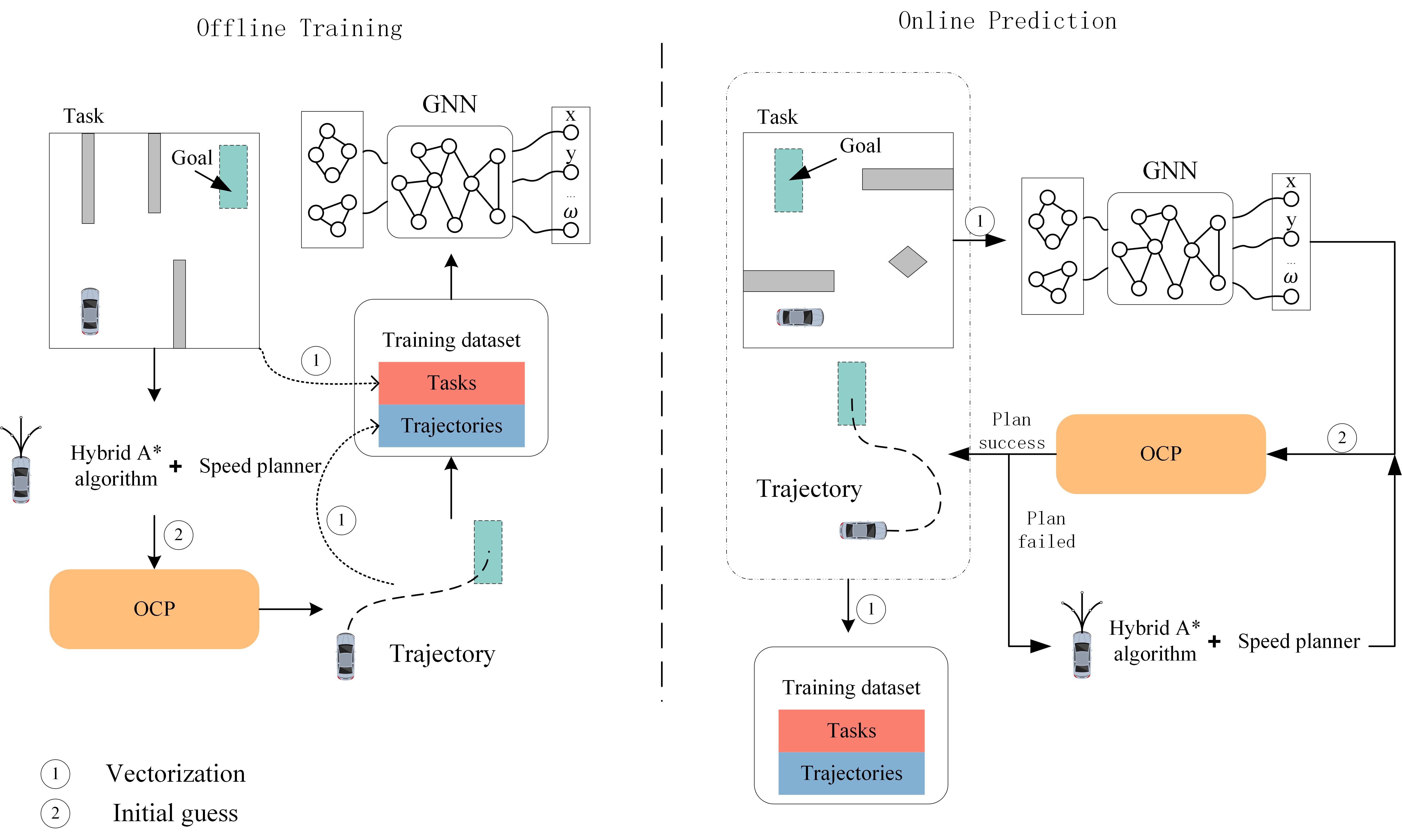
In unstructured environments, obstacles are diverse and lack lane markings, making trajectory planning for intelligent vehicles a challenging task. Traditional trajectory planning methods typically involve multiple stages, including path planning, speed planning, and trajectory optimization. These methods require the manual design of numerous parameters for each stage, resulting in significant workload and computational burden. While end-to-end trajectory planning methods are simple and efficient, they often fail to ensure that the trajectory meets vehicle dynamics and obstacle avoidance constraints in unstructured scenarios. Therefore, this paper proposes a novel trajectory planning method based on Graph Neural Networks (GNN) and numerical optimization. The proposed method consists of two stages: (1) initial trajectory prediction using the GNN, (2) trajectory optimization using numerical optimization. First, the graph neural network processes the environment information and predicts a rough trajectory, replacing traditional path and speed planning. This predicted trajectory serves as the initial solution for the numerical optimization stage, which optimizes the trajectory to ensure compliance with vehicle dynamics and obstacle avoidance constraints. We conducted simulation experiments to validate the feasibility of the proposed algorithm and compared it with other mainstream planning algorithms. The results demonstrate that the proposed method simplifies the trajectory planning process and significantly improves planning efficiency.
6/14/2024

Embedded Hierarchical MPC for Autonomous Navigation
Dennis Benders, Johannes Kohler, Thijs Niesten, Robert Babuv{s}ka, Javier Alonso-Mora, Laura Ferranti
0
0
To efficiently deploy robotic systems in society, mobile robots need to autonomously and safely move through complex environments. Nonlinear model predictive control (MPC) methods provide a natural way to find a dynamically feasible trajectory through the environment without colliding with nearby obstacles. However, the limited computation power available on typical embedded robotic systems, such as quadrotors, poses a challenge to running MPC in real-time, including its most expensive tasks: constraints generation and optimization. To address this problem, we propose a novel hierarchical MPC scheme that interconnects a planning and a tracking layer. The planner constructs a trajectory with a long prediction horizon at a slow rate, while the tracker ensures trajectory tracking at a relatively fast rate. We prove that the proposed framework avoids collisions and is recursively feasible. Furthermore, we demonstrate its effectiveness in simulations and lab experiments with a quadrotor that needs to reach a goal position in a complex static environment. The code is efficiently implemented on the quadrotor's embedded computer to ensure real-time feasibility. Compared to a state-of-the-art single-layer MPC formulation, this allows us to increase the planning horizon by a factor of 5, which results in significantly better performance.
6/18/2024

System-level Safety Guard: Safe Tracking Control through Uncertain Neural Network Dynamics Models
Xiao Li, Yutong Li, Anouck Girard, Ilya Kolmanovsky
0
0
The Neural Network (NN), as a black-box function approximator, has been considered in many control and robotics applications. However, difficulties in verifying the overall system safety in the presence of uncertainties hinder the deployment of NN modules in safety-critical systems. In this paper, we leverage the NNs as predictive models for trajectory tracking of unknown dynamical systems. We consider controller design in the presence of both intrinsic uncertainty and uncertainties from other system modules. In this setting, we formulate the constrained trajectory tracking problem and show that it can be solved using Mixed-integer Linear Programming (MILP). The proposed MILP-based approach is empirically demonstrated in robot navigation and obstacle avoidance through simulations. The demonstration videos are available at https://xiaolisean.github.io/publication/2023-11-01-L4DC2024.
5/21/2024