Enhancing Maritime Trajectory Forecasting via H3 Index and Causal Language Modelling (CLM)

0
Sign in to get full access
Overview
• This paper explores ways to enhance maritime trajectory forecasting using the H3 index and Causal Language Modelling (CLM).
• The H3 index is a geospatial indexing system that can be used to represent vessel locations, while CLM is a technique for modeling causal relationships between variables.
• The researchers aim to improve the accuracy and robustness of maritime trajectory forecasting, which has important applications in areas like maritime safety, logistics, and environmental protection.
Plain English Explanation
• Predicting the future paths of ships and boats, known as maritime trajectory forecasting, is an important problem with many real-world applications.
• This paper investigates two techniques that could help make these forecasts more accurate and reliable:
-
The H3 index is a way of representing the locations of vessels on a map using a hierarchical system of hexagons. This could allow for more precise modeling of vessel movements.
-
Causal Language Modelling (CLM) is a method for understanding the underlying causes and relationships between different factors that influence a vessel's trajectory. This could lead to more robust and explainable forecasts.
• By combining these two approaches, the researchers aim to create a system that can make better predictions about where ships and boats will go in the future. This could have important benefits for things like maritime safety, supply chain management, and environmental protection.
Technical Explanation
• The paper first provides background on maritime trajectory forecasting and the limitations of existing approaches. It then introduces the key components of the proposed system:
-
The H3 index is used to discretize the maritime environment into a grid of hexagonal cells, allowing vessel locations to be represented with higher spatial precision.
-
A Causal Language Model (CLM) is used to capture the causal relationships between various factors (e.g., weather, traffic patterns, vessel characteristics) and vessel trajectories. This allows the model to make more robust and explainable forecasts.
• The researchers conduct experiments using real-world maritime data to evaluate the performance of their approach. They compare it to baseline methods and demonstrate improvements in trajectory forecasting accuracy and robustness.
• The paper also discusses potential limitations of the proposed system, such as the need for high-quality data and the challenge of scaling the CLM to large maritime environments.
Critical Analysis
• While the paper presents a promising approach to enhancing maritime trajectory forecasting, there are some potential concerns and areas for further research:
• The reliance on the H3 index and CLM techniques may limit the generalizability of the approach, as these methods may not be suitable for all maritime environments or data sources.
• The paper does not provide a detailed analysis of the computational complexity and scalability of the proposed system, which could be an important consideration for real-world deployment.
• The authors acknowledge the need for high-quality data, but do not address the challenges of data acquisition and preprocessing, which can be a significant hurdle in many maritime applications.
• Further research could explore the integration of the H3 index and CLM with other trajectory prediction techniques, as well as the potential for transfer learning or domain adaptation to improve performance in diverse maritime settings.
Conclusion
• This paper presents a novel approach to enhancing maritime trajectory forecasting by leveraging the H3 index and Causal Language Modelling (CLM).
• The proposed system shows promise in improving the accuracy and robustness of vessel trajectory predictions, which could have important implications for a wide range of maritime applications, from safety and logistics to environmental protection.
• While the paper identifies some limitations and areas for further research, the overall approach demonstrates the potential of combining spatial indexing and causal modeling techniques to tackle complex forecasting problems in the maritime domain.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Enhancing Maritime Trajectory Forecasting via H3 Index and Causal Language Modelling (CLM)
Nicolas Drapier, Aladine Chetouani, Aur'elien Chateigner
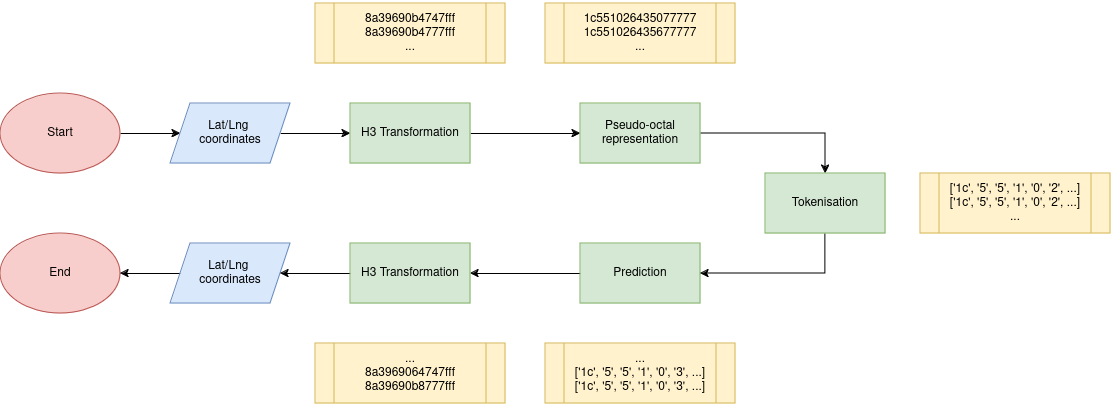
The prediction of ship trajectories is a growing field of study in artificial intelligence. Traditional methods rely on the use of LSTM, GRU networks, and even Transformer architectures for the prediction of spatio-temporal series. This study proposes a viable alternative for predicting these trajectories using only GNSS positions. It considers this spatio-temporal problem as a natural language processing problem. The latitude/longitude coordinates of AIS messages are transformed into cell identifiers using the H3 index. Thanks to the pseudo-octal representation, it becomes easier for language models to learn the spatial hierarchy of the H3 index. The method is compared with a classical Kalman filter, widely used in the maritime domain, and introduces the Fr'echet distance as the main evaluation metric. We show that it is possible to predict ship trajectories quite precisely up to 8 hours with 30 minutes of context. We demonstrate that this alternative works well enough to predict trajectories worldwide.
Read more5/17/2024
✨
0
Probabilistic Feature Augmentation for AIS-Based Multi-Path Long-Term Vessel Trajectory Forecasting
Gabriel Spadon, Jay Kumar, Derek Eden, Josh van Berkel, Tom Foster, Amilcar Soares, Ronan Fablet, Stan Matwin, Ronald Pelot
Maritime transportation is paramount in achieving global economic growth, entailing concurrent ecological obligations in sustainability and safeguarding endangered marine species, most notably preserving large whale populations. In this regard, the Automatic Identification System (AIS) data plays a significant role by offering real-time streaming data on vessel movement, allowing enhanced traffic monitoring. This study explores using AIS data to prevent vessel-to-whale collisions by forecasting long-term vessel trajectories from engineered AIS data sequences. For such a task, we have developed an encoder-decoder model architecture using Bidirectional Long Short-Term Memory Networks (Bi-LSTM) to predict the next 12 hours of vessel trajectories using 1 to 3 hours of AIS data as input. We feed the model with probabilistic features engineered from historical AIS data that refer to each trajectory's potential route and destination. The model then predicts the vessel's trajectory, considering these additional features by leveraging convolutional layers for spatial feature learning and a position-aware attention mechanism that increases the importance of recent timesteps of a sequence during temporal feature learning. The probabilistic features have an F1 Score of approximately 85% and 75% for each feature type, respectively, demonstrating their effectiveness in augmenting information to the neural network. We test our model on the Gulf of St. Lawrence, a region known to be the habitat of North Atlantic Right Whales (NARW). Our model achieved a high R2 score of over 98% using various techniques and features. It stands out among other approaches as it can make complex decisions during turnings and path selection. Our study highlights the potential of data engineering and trajectory forecasting models for marine life species preservation.
Read more5/3/2024

0
Improved context-sensitive transformer model for inland vessel trajectory prediction
Kathrin Donandt, Karim Bottger, Dirk Soffker
Physics-related and model-based vessel trajectory prediction is highly accurate but requires specific knowledge of the vessel under consideration which is not always practical. Machine learning-based trajectory prediction models do not require expert knowledge, but rely on the implicit knowledge extracted from massive amounts of data. Several deep learning (DL) methods for vessel trajectory prediction have recently been suggested. The DL models developed typically only process information about the (dis)location of vessels defined with respect to a global reference system. In the context of inland navigation, this can be problematic, since without knowledge of the limited navigable space, irrealistic trajectories are likely to be determined. If spatial constraintes are introduced, e.g., by implementing an additional submodule to process map data, however, overall complexity increases. Instead of processing the vessel displacement information on the one hand and the spatial information on the other hand, the paper proposes the merging of both information. Here, fairway-related and navigation-related displacement information are used directly. In this way, the previously proposed context-sensitive Classification Transformer (CSCT) shows an improved spatial awareness. Additionally, the CSCT is adapted to assess the model uncertainty by enabling dropout during inference. This approach is trained on different inland waterways to analyze its generalizability. As the improved CSCT obtains lower prediction errors and enables to estimate the trustworthiness of each prediction, it is more suitable for safety-critical applications in inland navigation than previously developed models.
Read more6/6/2024

0
Enhancing Global Maritime Traffic Network Forecasting with Gravity-Inspired Deep Learning Models
Ruixin Song, Gabriel Spadon, Ronald Pelot, Stan Matwin, Amilcar Soares
Aquatic non-indigenous species (NIS) pose significant threats to biodiversity, disrupting ecosystems and inflicting substantial economic damages across agriculture, forestry, and fisheries. Due to the fast growth of global trade and transportation networks, NIS has been introduced and spread unintentionally in new environments. This study develops a new physics-informed model to forecast maritime shipping traffic between port regions worldwide. The predicted information provided by these models, in turn, is used as input for risk assessment of NIS spread through transportation networks to evaluate the capability of our solution. Inspired by the gravity model for international trades, our model considers various factors that influence the likelihood and impact of vessel activities, such as shipping flux density, distance between ports, trade flow, and centrality measures of transportation hubs. Accordingly, this paper introduces transformers to gravity models to rebuild the short- and long-term dependencies that make the risk analysis feasible. Thus, we introduce a physics-inspired framework that achieves an 89% binary accuracy for existing and non-existing trajectories and an 84.8% accuracy for the number of vessels flowing between key port areas, representing more than 10% improvement over the traditional deep-gravity model. Along these lines, this research contributes to a better understanding of NIS risk assessment. It allows policymakers, conservationists, and stakeholders to prioritize management actions by identifying high-risk invasion pathways. Besides, our model is versatile and can include new data sources, making it suitable for assessing international vessel traffic flow in a changing global landscape.
Read more7/12/2024