Probabilistic Feature Augmentation for AIS-Based Multi-Path Long-Term Vessel Trajectory Forecasting

0
✨
Sign in to get full access
Overview
- Explores using Automatic Identification System (AIS) data to predict long-term vessel trajectories and prevent collisions with endangered whales
- Develops an encoder-decoder model using Bidirectional Long Short-Term Memory (Bi-LSTM) to forecast vessel movements up to 12 hours in advance
- Incorporates engineered probabilistic features from historical AIS data to enhance the model's trajectory predictions
- Tests the model in the Gulf of St. Lawrence, a habitat for the North Atlantic Right Whale, achieving high accuracy
Plain English Explanation
Maritime transportation is essential for global economic growth, but it also has an ecological impact on the environment and marine life. To address this, researchers are using data from the Automatic Identification System (AIS) - a system that tracks vessel movements in real-time - to predict where ships will go in the future. This can help prevent collisions between ships and endangered whales, particularly the North Atlantic Right Whale.
The researchers developed a neural network model that takes in a few hours of AIS data and uses it to forecast where a ship will be up to 12 hours later. To make these predictions more accurate, the researchers also incorporated additional features that describe the potential routes and destinations of the ships based on historical data.
The model was tested in the Gulf of St. Lawrence, an important habitat for the North Atlantic Right Whale. It was able to predict the ships' future movements with a very high degree of accuracy, over 98% in some cases. This could be a valuable tool for monitoring ship traffic and preventing collisions that could harm these endangered whales.
Technical Explanation
The researchers developed an encoder-decoder model architecture using Bidirectional Long Short-Term Memory Networks (Bi-LSTM) to predict the next 12 hours of a vessel's trajectory based on 1 to 3 hours of historical AIS data. To enhance the model's performance, they engineered probabilistic features from the AIS data that capture information about each vessel's potential route and destination.
These probabilistic features were fed into the model, which used convolutional layers for spatial feature learning and a position-aware attention mechanism to increase the importance of recent timesteps during temporal feature learning. This allowed the model to make more accurate decisions about turns and path selection when forecasting the vessel's future trajectory.
The researchers tested their model in the Gulf of St. Lawrence, a critical habitat for the North Atlantic Right Whale. Their model achieved an impressive R2 score of over 98%, outperforming other approaches in its ability to handle complex trajectory patterns. This highlights the potential of data engineering and advanced trajectory forecasting models for marine life conservation efforts.
Critical Analysis
The researchers acknowledge that their study is limited to a specific geographic region and may not generalize to other areas. Additionally, they note that the accuracy of the probabilistic features used to augment the model's input could be improved with more sophisticated feature engineering techniques.
While the model's high accuracy is impressive, it's important to consider potential sources of error or bias in the underlying AIS data, which could be influenced by factors such as sensor coverage, reporting intervals, or data quality issues. Further research may be needed to quantify and mitigate these potential sources of error.
Additionally, the researchers do not discuss the computational complexity or real-time performance requirements of their model, which could be important considerations for practical deployment in a marine conservation context. Evaluating the trade-offs between model complexity, accuracy, and inference speed would be a valuable area for future work.
Overall, this research demonstrates the potential of leveraging AIS data and advanced trajectory forecasting techniques to support marine life conservation efforts, but additional validation and refinement may be necessary before the approach can be widely adopted.
Conclusion
This study explores the use of Automatic Identification System (AIS) data and a Bi-LSTM-based encoder-decoder model to predict long-term vessel trajectories, with the goal of preventing collisions with endangered whales. By incorporating engineered probabilistic features from historical AIS data, the researchers were able to achieve high accuracy in forecasting vessel movements, with an R2 score exceeding 98% in the test region.
The implications of this research are significant, as it suggests that data-driven approaches can play a crucial role in supporting marine life conservation efforts. By accurately predicting vessel trajectories, stakeholders can better monitor and manage ship traffic in sensitive ecological areas, ultimately reducing the risk of harmful collisions with protected species like the North Atlantic Right Whale.
While the study has some limitations, it highlights the potential of leveraging advanced machine learning techniques and data engineering to address complex environmental challenges. As the field of marine conservation continues to evolve, this work serves as an important example of how innovative technological solutions can be applied to safeguard our planet's precious marine ecosystems.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
✨
0
Probabilistic Feature Augmentation for AIS-Based Multi-Path Long-Term Vessel Trajectory Forecasting
Gabriel Spadon, Jay Kumar, Derek Eden, Josh van Berkel, Tom Foster, Amilcar Soares, Ronan Fablet, Stan Matwin, Ronald Pelot
Maritime transportation is paramount in achieving global economic growth, entailing concurrent ecological obligations in sustainability and safeguarding endangered marine species, most notably preserving large whale populations. In this regard, the Automatic Identification System (AIS) data plays a significant role by offering real-time streaming data on vessel movement, allowing enhanced traffic monitoring. This study explores using AIS data to prevent vessel-to-whale collisions by forecasting long-term vessel trajectories from engineered AIS data sequences. For such a task, we have developed an encoder-decoder model architecture using Bidirectional Long Short-Term Memory Networks (Bi-LSTM) to predict the next 12 hours of vessel trajectories using 1 to 3 hours of AIS data as input. We feed the model with probabilistic features engineered from historical AIS data that refer to each trajectory's potential route and destination. The model then predicts the vessel's trajectory, considering these additional features by leveraging convolutional layers for spatial feature learning and a position-aware attention mechanism that increases the importance of recent timesteps of a sequence during temporal feature learning. The probabilistic features have an F1 Score of approximately 85% and 75% for each feature type, respectively, demonstrating their effectiveness in augmenting information to the neural network. We test our model on the Gulf of St. Lawrence, a region known to be the habitat of North Atlantic Right Whales (NARW). Our model achieved a high R2 score of over 98% using various techniques and features. It stands out among other approaches as it can make complex decisions during turnings and path selection. Our study highlights the potential of data engineering and trajectory forecasting models for marine life species preservation.
Read more5/3/2024

0
Outlier detection in maritime environments using AIS data and deep recurrent architectures
Constantine Maganaris, Eftychios Protopapadakis, Nikolaos Doulamis
A methodology based on deep recurrent models for maritime surveillance, over publicly available Automatic Identification System (AIS) data, is presented in this paper. The setup employs a deep Recurrent Neural Network (RNN)-based model, for encoding and reconstructing the observed ships' motion patterns. Our approach is based on a thresholding mechanism, over the calculated errors between observed and reconstructed motion patterns of maritime vessels. Specifically, a deep-learning framework, i.e. an encoder-decoder architecture, is trained using the observed motion patterns, enabling the models to learn and predict the expected trajectory, which will be compared to the effective ones. Our models, particularly the bidirectional GRU with recurrent dropouts, showcased superior performance in capturing the temporal dynamics of maritime data, illustrating the potential of deep learning to enhance maritime surveillance capabilities. Our work lays a solid foundation for future research in this domain, highlighting a path toward improved maritime safety through the innovative application of technology.
Read more6/17/2024

0
Enhancing Global Maritime Traffic Network Forecasting with Gravity-Inspired Deep Learning Models
Ruixin Song, Gabriel Spadon, Ronald Pelot, Stan Matwin, Amilcar Soares
Aquatic non-indigenous species (NIS) pose significant threats to biodiversity, disrupting ecosystems and inflicting substantial economic damages across agriculture, forestry, and fisheries. Due to the fast growth of global trade and transportation networks, NIS has been introduced and spread unintentionally in new environments. This study develops a new physics-informed model to forecast maritime shipping traffic between port regions worldwide. The predicted information provided by these models, in turn, is used as input for risk assessment of NIS spread through transportation networks to evaluate the capability of our solution. Inspired by the gravity model for international trades, our model considers various factors that influence the likelihood and impact of vessel activities, such as shipping flux density, distance between ports, trade flow, and centrality measures of transportation hubs. Accordingly, this paper introduces transformers to gravity models to rebuild the short- and long-term dependencies that make the risk analysis feasible. Thus, we introduce a physics-inspired framework that achieves an 89% binary accuracy for existing and non-existing trajectories and an 84.8% accuracy for the number of vessels flowing between key port areas, representing more than 10% improvement over the traditional deep-gravity model. Along these lines, this research contributes to a better understanding of NIS risk assessment. It allows policymakers, conservationists, and stakeholders to prioritize management actions by identifying high-risk invasion pathways. Besides, our model is versatile and can include new data sources, making it suitable for assessing international vessel traffic flow in a changing global landscape.
Read more7/12/2024
0
Enhancing Maritime Trajectory Forecasting via H3 Index and Causal Language Modelling (CLM)
Nicolas Drapier, Aladine Chetouani, Aur'elien Chateigner
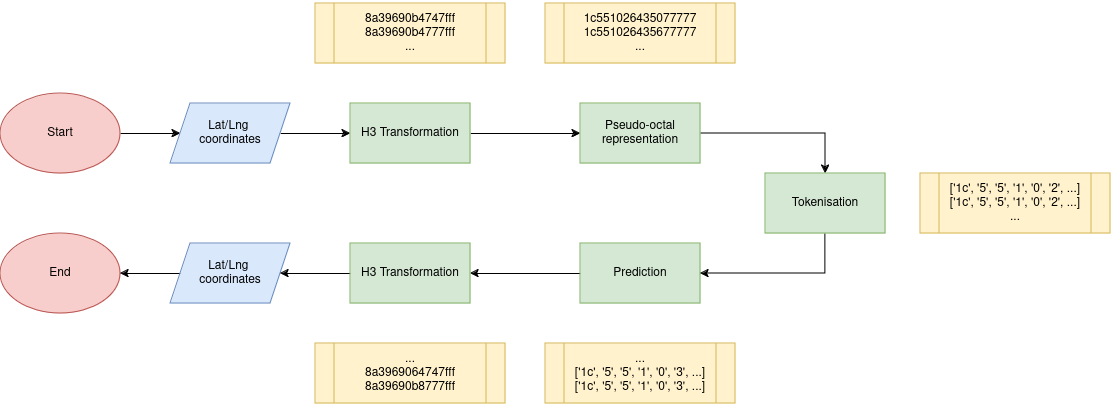
The prediction of ship trajectories is a growing field of study in artificial intelligence. Traditional methods rely on the use of LSTM, GRU networks, and even Transformer architectures for the prediction of spatio-temporal series. This study proposes a viable alternative for predicting these trajectories using only GNSS positions. It considers this spatio-temporal problem as a natural language processing problem. The latitude/longitude coordinates of AIS messages are transformed into cell identifiers using the H3 index. Thanks to the pseudo-octal representation, it becomes easier for language models to learn the spatial hierarchy of the H3 index. The method is compared with a classical Kalman filter, widely used in the maritime domain, and introduces the Fr'echet distance as the main evaluation metric. We show that it is possible to predict ship trajectories quite precisely up to 8 hours with 30 minutes of context. We demonstrate that this alternative works well enough to predict trajectories worldwide.
Read more5/17/2024