Ephemeral Myographic Motion: Repurposing the Myo Armband to Control Disposable Pneumatic Sculptures

0
Sign in to get full access
Overview
- Repurposing the Myo Armband, a discontinued wearable device, to control ephemeral pneumatic sculptures made from recycled materials
- Exploring the intersection of interactive art, sustainability, and human-computer interaction
- Developing a system that allows users to manipulate digital artifacts through physical gestures
Plain English Explanation
This research explores a novel way to breathe new life into old technology by repurposing a discontinued device called the Myo Armband. The Myo Armband was a wearable that could detect muscle movements, allowing users to control digital systems with hand gestures.
The researchers saw an opportunity to use the Myo Armband to control unique, disposable sculptures made from recycled pneumatic materials. These sculptures would be "ephemeral" in nature, meaning they would exist for a limited time before being discarded. By linking the Myo Armband's gesture controls to the inflation and deflation of these sculptures, the researchers created interactive art pieces that users could manipulate with their own movements.
This approach combines sustainability, human-computer interaction, and the creation of digital artifacts that are intended to be temporary. It demonstrates how old technology can be repurposed in novel ways to explore new artistic and interactive experiences.
Technical Explanation
The core of this system is the repurposing of the Myo Armband, a discontinued wearable device that could detect muscle movements in the user's arm. The researchers developed a custom software system that mapped the Myo Armband's gesture recognition capabilities to the inflation and deflation of pneumatic sculptures made from recycled materials.
These sculptures were designed to be "ephemeral" - temporary and disposable. They were constructed using stretchable pneumatic sleeves and fabric-based actuators to create dynamic, inflatable forms. The researchers also explored the use of biodegradable and interactive materials to further enhance the temporary nature of these sculptures.
By linking the Myo Armband's gesture recognition to the control of these ephemeral sculptures, the researchers created a system that allowed users to manipulate digital artifacts through their physical movements. This approach demonstrates how old technology can be repurposed and combined with new materials and techniques to explore novel interactive experiences at the intersection of art, sustainability, and human-computer interaction.
Critical Analysis
The researchers acknowledge several limitations and areas for further exploration in this work. For example, the use of the Myo Armband, which is no longer commercially available, raises questions about the long-term viability and scalability of this approach. Additionally, the ephemeral nature of the sculptures, while an intentional design choice, may limit the durability and lifespan of the interactive experiences.
The researchers also note the need for further research into the user experience and emotional responses evoked by these temporary, disposable sculptures. Understanding how people interact with and perceive these kinds of digital artifacts could inform future iterations and applications of this technology.
Despite these limitations, the researchers have demonstrated a compelling and innovative approach to repurposing old technology, exploring sustainable materials, and creating novel interactive experiences. The study's focus on the intersection of art, sustainability, and human-computer interaction opens up new avenues for exploration and potential real-world applications.
Conclusion
This research presents a unique approach to revitalizing abandoned technology by repurposing the Myo Armband to control ephemeral pneumatic sculptures made from recycled materials. By linking gesture-based controls to dynamic, temporary art pieces, the researchers have created a system that explores the intersection of interactive art, sustainability, and human-computer interaction.
The findings of this study suggest that there is value in exploring novel ways to breathe new life into old technology, and in using these repurposed devices to create unique, temporary digital artifacts. This work contributes to a growing body of research on the potential of sustainable and ephemeral interactions, and highlights the ongoing importance of finding creative solutions to reduce waste and foster more sustainable technological practices.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Ephemeral Myographic Motion: Repurposing the Myo Armband to Control Disposable Pneumatic Sculptures
Celia Chen, Alex Leitch
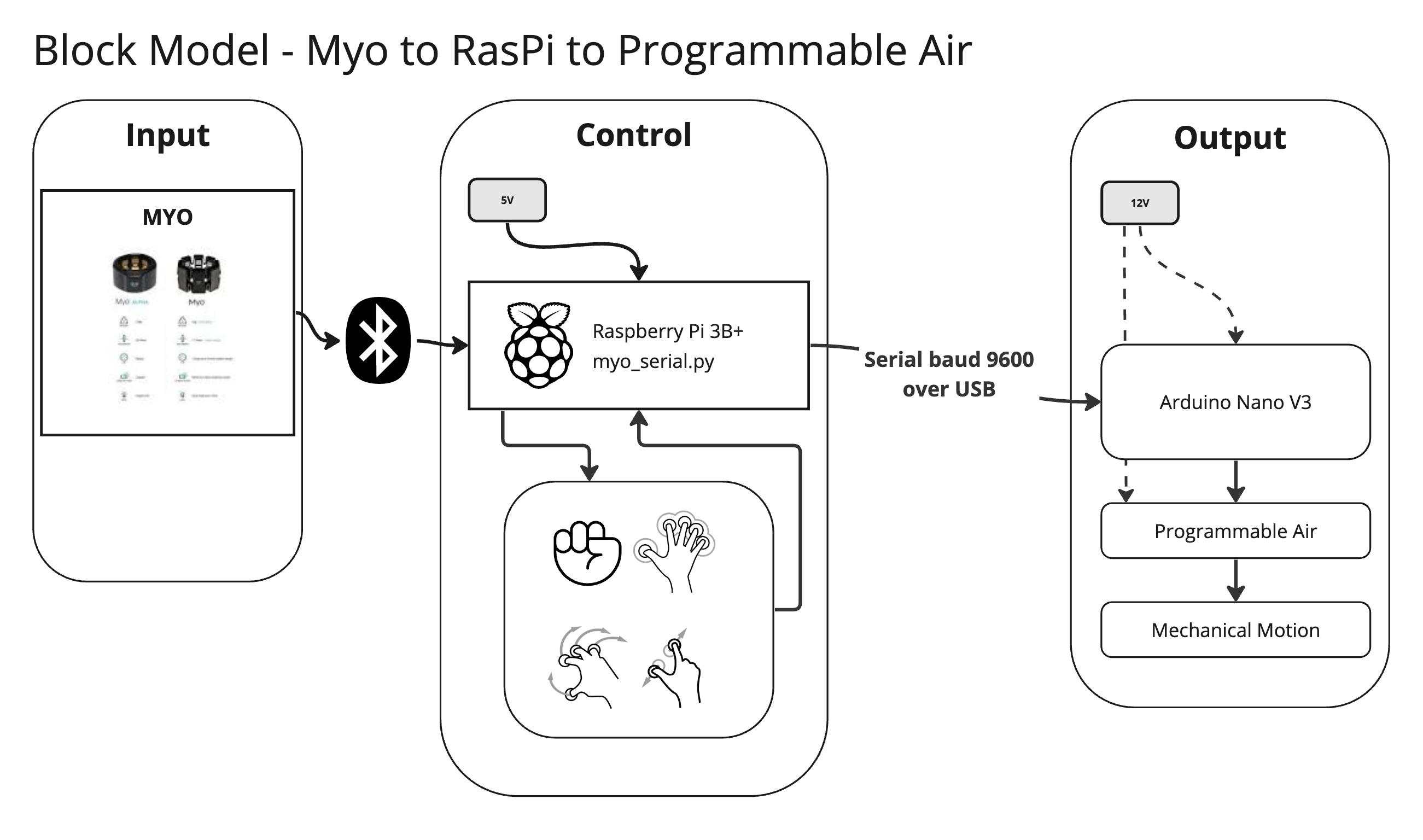
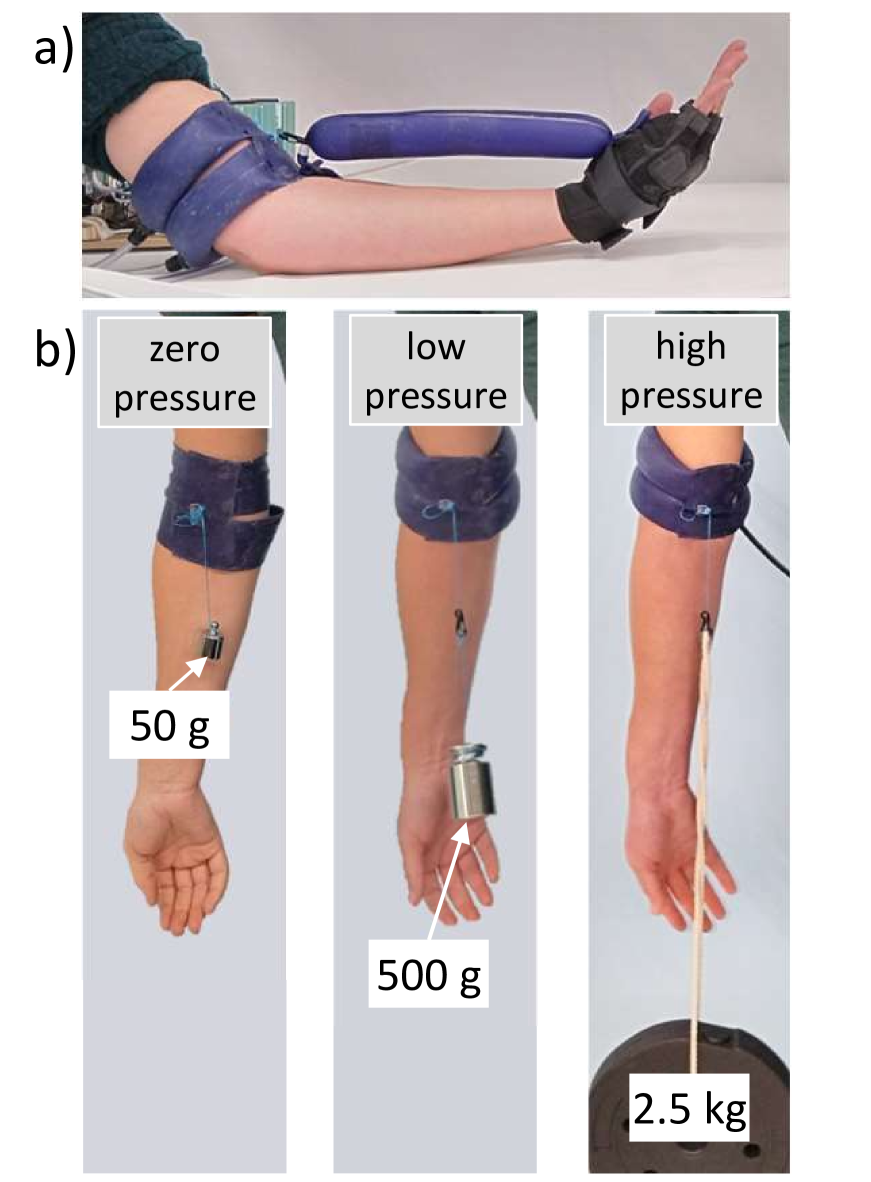
This paper details the development of an interactive sculpture built from deprecated hardware technology and intentionally decomposable, transient materials. We detail a case study of Strain - an emotive prototype that reclaims two orphaned digital artifacts to power a kinetic sculpture made of common disposable objects. We use the Myo, an abandoned myoelectric armband, in concert with the Programmable Air, a soft-robotics prototyping project, to manipulate a pneumatic bladder array constructed from condoms, bamboo skewers, and a small library of 3D printed PLA plastic connectors designed to work with these generic parts. The resulting sculpture achieves surprisingly organic actuation. The goal of this project is to produce several reusable components: software to resuscitate the Myo Armband, homeostasis software for the Programmable Air or equivalent pneumatic projects, and a library of easily-printed parts that will work with generic bamboo disposables for sculptural prototyping. This project works to develop usable, repeatable engineering by applying it to a slightly whimsical object that promotes a strong emotional response in its audience. Through this, we transform the disposable into the sustainable. In this paper, we reflect on project-based insights into rescuing and revitalizing abandoned consumer electronics for future works.
Read more4/15/2024

0
Replicating Human Anatomy with Vision Controlled Jetting -- A Pneumatic Musculoskeletal Hand and Forearm
Thomas Buchner (ETH Zurich, Switzerland), Stefan Weirich (ETH Zurich, Switzerland), Alexander M. Kubler (ETH Zurich, Switzerland), Wojciech Matusik (Inkbit, USA, CSAIL, MIT, USA), Robert K. Katzschmann (ETH Zurich, Switzerland)
The functional replication and actuation of complex structures inspired by nature is a longstanding goal for humanity. Creating such complex structures combining soft and rigid features and actuating them with artificial muscles would further our understanding of natural kinematic structures. We printed a biomimetic hand in a single print process comprised of a rigid skeleton, soft joint capsules, tendons, and printed touch sensors. We showed it's actuation using electric motors. In this work, we expand on this work by adding a forearm that is also closely modeled after the human anatomy and replacing the hand's motors with 22 independently controlled pneumatic artificial muscles (PAMs). Our thin, high-strain (up to 30.1%) PAMs match the performance of state-of-the-art artificial muscles at a lower cost. The system showcases human-like dexterity with independent finger movements, demonstrating successful grasping of various objects, ranging from a small, lightweight coin to a large can of 272g in weight. The performance evaluation, based on fingertip and grasping forces along with finger joint range of motion, highlights the system's potential.
Read more5/1/2024
0
Stretchable Pneumatic Sleeve for Adaptable, Low-Displacement Anchoring in Exosuits
Katalin Schaffer, Ultan Fallon, Margaret M. Coad
Despite recent advances in wearable technology, interfacing movement assistance devices with the human body remains challenging. We present a stretchable pneumatic sleeve that can anchor an exosuit actuator to the human arm with a low displacement of the actuator's mounting point relative to the body during operation. Our sleeve has the potential to serve as an adaptable attachment mechanism for exosuits, since it can adjust its pressure to only compress the arm as much as needed to transmit the applied exosuit forces without a large displacement. We discuss the design of our sleeve, which is made of fabric pneumatic artificial muscle (fPAM) actuators formed into bands. We quantify the performance of nine fPAM bands of various lengths and widths, as well as three sleeves (an fPAM sleeve, a series pouch motor (SPM) sleeve as in previous literature, and an off the shelf hook and loop sleeve), through the measurement of the compressing force as a function of pressure and the localized pulling force that can be resisted as a function of both pressure and mounting point displacement. Our experimental results show that fPAM bands with smaller resting length and/or larger resting width produce higher forces. Also, when inflated, an fPAM sleeve that has equivalent dimensions to the SPM sleeve while fully stretched has similar performance to the SPM sleeve. While inflated, both pneumatic sleeves decrease the mounting point displacement compared to the hook and loop sleeve. Compared to the SPM sleeve, the fPAM sleeve is able to hold larger internal pressure before bursting, increasing its possible force range. Also, when not inflated, the fPAM sleeve resists the pulling force well, indicating its ability to provide anchoring when not actuated.
Read more4/9/2024

0
Generative Design of Multimodal Soft Pneumatic Actuators
Saswath Ghosh, Sitikantha Roy
The recent advancements in machine learning techniques have steered us towards the data-driven design of products. Motivated by this objective, the present study proposes an automated design methodology that employs data-driven methods to generate new designs of soft actuators. One of the bottlenecks in the data-driven automated design process is having publicly available data to train the model. Due to its unavailability, a synthetic data set of soft pneumatic network (Pneu-net) actuators has been created. The parametric design data set for the training of the generative model is created using data augmentation. Next, the Gaussian mixture model has been applied to generate novel parametric designs of Pneu-net actuators. The distance-based metric defines the novelty and diversity of the generated designs. In addition, it is noteworthy that the model has the potential to generate a multimodal Pneu-net actuator that could perform in-plane bending and out-of-plane twisting. Later, the novel design is passed through finite element analysis to evaluate the quality of the generated design. Moreover, the trajectory of each category of Pneu-net actuators evaluates the performance of the generated Pneu-net actuators and emphasizes the necessity of multimodal actuation. The proposed model could accelerate the design of new soft robots by selecting a soft actuator from the developed novel pool of soft actuators.
Read more8/13/2024