EquivAct: SIM(3)-Equivariant Visuomotor Policies beyond Rigid Object Manipulation
2310.16050
0
0

Abstract
If a robot masters folding a kitchen towel, we would expect it to master folding a large beach towel. However, existing policy learning methods that rely on data augmentation still don't guarantee such generalization. Our insight is to add equivariance to both the visual object representation and policy architecture. We propose EquivAct which utilizes SIM(3)-equivariant network structures that guarantee generalization across all possible object translations, 3D rotations, and scales by construction. EquivAct is trained in two phases. We first pre-train a SIM(3)-equivariant visual representation on simulated scene point clouds. Then, we learn a SIM(3)-equivariant visuomotor policy using a small amount of source task demonstrations. We show that the learned policy directly transfers to objects that substantially differ from demonstrations in scale, position, and orientation. We evaluate our method in three manipulation tasks involving deformable and articulated objects, going beyond typical rigid object manipulation tasks considered in prior work. We conduct experiments both in simulation and in reality. For real robot experiments, our method uses 20 human demonstrations of a tabletop task and transfers zero-shot to a mobile manipulation task in a much larger setup. Experiments confirm that our contrastive pre-training procedure and equivariant architecture offer significant improvements over prior work. Project website: https://equivact.github.io
Create account to get full access
Overview
• This paper presents a new approach called EquivAct, which aims to develop SIM(3)-equivariant visuomotor policies for robot manipulation tasks beyond just rigid object manipulation.
• EquivAct leverages equivariant neural networks to learn policies that are invariant to 3D spatial transformations, allowing for more general and flexible robot control.
Plain English Explanation
• Robots today can manipulate rigid objects quite well, like picking up a box or a can. However, they struggle with more complex, deformable objects like cloth or ropes.
• The key innovation in this paper is a new technique called EquivAct that helps robots learn control policies that work for a wider range of objects, not just rigid ones.
• The core idea is to use neural networks that are "equivariant" to 3D spatial transformations. This means the network's outputs change in predictable ways when the input images are rotated, translated, or scaled.
• By building this equivariance into the network architecture, the authors show the robot can learn more general manipulation skills that aren't limited to a specific object type or pose. This could enable robots to tackle a broader range of real-world tasks.
Technical Explanation
• EquivAct uses SIM(3)-equivariant neural networks to learn visuomotor policies, where the network outputs change predictably under 3D translations, rotations, and scaling transformations.
• The authors evaluate EquivAct on a range of manipulation tasks in simulation, including deformable object and articulated object manipulation, showing improved performance compared to non-equivariant baselines.
• EquivAct builds on prior work in equivariant 3D learning and generalized visuomotor policy learning.
Critical Analysis
• The paper demonstrates promising results, but the experiments are still confined to simulation. Evaluating EquivAct's performance on real-world robotic systems would be an important next step.
• Additionally, the paper does not explore the sample efficiency or training time of EquivAct compared to non-equivariant baselines, which could be a key practical consideration for real-world deployment.
• Further work is also needed to understand the types of deformable and articulated objects where EquivAct's equivariance properties provide the greatest benefits in terms of generalization and performance.
Conclusion
• EquivAct represents an exciting advance in developing more flexible and capable robot manipulation policies that can handle a broader range of objects beyond just rigid bodies.
• The use of SIM(3)-equivariant neural networks is a promising direction for enabling robots to learn generalizable skills that are not limited by object type or pose.
• While additional real-world validation is needed, this research opens up new possibilities for robots to assist humans with a wider variety of manipulation tasks in unstructured environments.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers

Deep SE(3)-Equivariant Geometric Reasoning for Precise Placement Tasks
Ben Eisner, Yi Yang, Todor Davchev, Mel Vecerik, Jonathan Scholz, David Held
0
0
Many robot manipulation tasks can be framed as geometric reasoning tasks, where an agent must be able to precisely manipulate an object into a position that satisfies the task from a set of initial conditions. Often, task success is defined based on the relationship between two objects - for instance, hanging a mug on a rack. In such cases, the solution should be equivariant to the initial position of the objects as well as the agent, and invariant to the pose of the camera. This poses a challenge for learning systems which attempt to solve this task by learning directly from high-dimensional demonstrations: the agent must learn to be both equivariant as well as precise, which can be challenging without any inductive biases about the problem. In this work, we propose a method for precise relative pose prediction which is provably SE(3)-equivariant, can be learned from only a few demonstrations, and can generalize across variations in a class of objects. We accomplish this by factoring the problem into learning an SE(3) invariant task-specific representation of the scene and then interpreting this representation with novel geometric reasoning layers which are provably SE(3) equivariant. We demonstrate that our method can yield substantially more precise placement predictions in simulated placement tasks than previous methods trained with the same amount of data, and can accurately represent relative placement relationships data collected from real-world demonstrations. Supplementary information and videos can be found at https://sites.google.com/view/reldist-iclr-2023.
4/23/2024
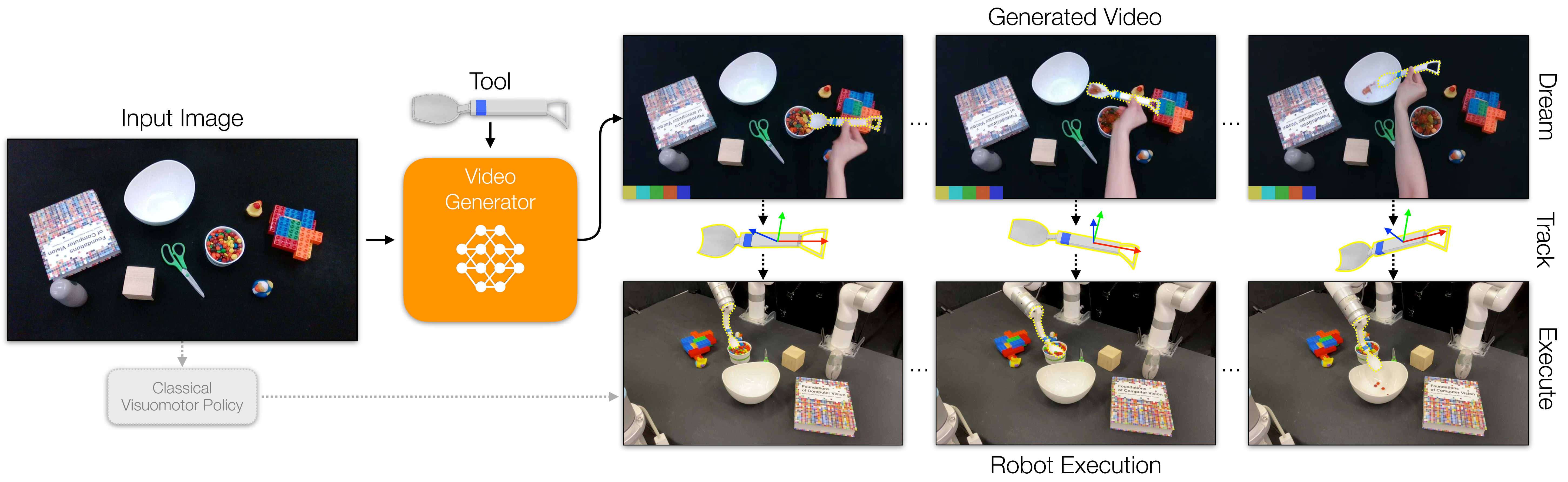
Dreamitate: Real-World Visuomotor Policy Learning via Video Generation
Junbang Liang, Ruoshi Liu, Ege Ozguroglu, Sruthi Sudhakar, Achal Dave, Pavel Tokmakov, Shuran Song, Carl Vondrick
0
0
A key challenge in manipulation is learning a policy that can robustly generalize to diverse visual environments. A promising mechanism for learning robust policies is to leverage video generative models, which are pretrained on large-scale datasets of internet videos. In this paper, we propose a visuomotor policy learning framework that fine-tunes a video diffusion model on human demonstrations of a given task. At test time, we generate an example of an execution of the task conditioned on images of a novel scene, and use this synthesized execution directly to control the robot. Our key insight is that using common tools allows us to effortlessly bridge the embodiment gap between the human hand and the robot manipulator. We evaluate our approach on four tasks of increasing complexity and demonstrate that harnessing internet-scale generative models allows the learned policy to achieve a significantly higher degree of generalization than existing behavior cloning approaches.
6/26/2024

Equivariant Spatio-Temporal Self-Supervision for LiDAR Object Detection
Deepti Hegde, Suhas Lohit, Kuan-Chuan Peng, Michael J. Jones, Vishal M. Patel
0
0
Popular representation learning methods encourage feature invariance under transformations applied at the input. However, in 3D perception tasks like object localization and segmentation, outputs are naturally equivariant to some transformations, such as rotation. Using pre-training loss functions that encourage equivariance of features under certain transformations provides a strong self-supervision signal while also retaining information of geometric relationships between transformed feature representations. This can enable improved performance in downstream tasks that are equivariant to such transformations. In this paper, we propose a spatio-temporal equivariant learning framework by considering both spatial and temporal augmentations jointly. Our experiments show that the best performance arises with a pre-training approach that encourages equivariance to translation, scaling, and flip, rotation and scene flow. For spatial augmentations, we find that depending on the transformation, either a contrastive objective or an equivariance-by-classification objective yields best results. To leverage real-world object deformations and motion, we consider sequential LiDAR scene pairs and develop a novel 3D scene flow-based equivariance objective that leads to improved performance overall. We show our pre-training method for 3D object detection which outperforms existing equivariant and invariant approaches in many settings.
4/19/2024
👨🏫
Evaluating Real-World Robot Manipulation Policies in Simulation
Xuanlin Li, Kyle Hsu, Jiayuan Gu, Karl Pertsch, Oier Mees, Homer Rich Walke, Chuyuan Fu, Ishikaa Lunawat, Isabel Sieh, Sean Kirmani, Sergey Levine, Jiajun Wu, Chelsea Finn, Hao Su, Quan Vuong, Ted Xiao
0
0
The field of robotics has made significant advances towards generalist robot manipulation policies. However, real-world evaluation of such policies is not scalable and faces reproducibility challenges, which are likely to worsen as policies broaden the spectrum of tasks they can perform. We identify control and visual disparities between real and simulated environments as key challenges for reliable simulated evaluation and propose approaches for mitigating these gaps without needing to craft full-fidelity digital twins of real-world environments. We then employ these approaches to create SIMPLER, a collection of simulated environments for manipulation policy evaluation on common real robot setups. Through paired sim-and-real evaluations of manipulation policies, we demonstrate strong correlation between policy performance in SIMPLER environments and in the real world. Additionally, we find that SIMPLER evaluations accurately reflect real-world policy behavior modes such as sensitivity to various distribution shifts. We open-source all SIMPLER environments along with our workflow for creating new environments at https://simpler-env.github.io to facilitate research on general-purpose manipulation policies and simulated evaluation frameworks.
5/10/2024