Evaluating the Effectiveness of Large Language Models in Representing and Understanding Movement Trajectories

0

Sign in to get full access
Overview
- This paper evaluates how well large language models can represent and understand movement trajectories.
- The researchers tested different language models on tasks related to spatial understanding and trajectory prediction.
- Their findings provide insights into the capabilities and limitations of current language models for spatial reasoning.
Plain English Explanation
The paper investigates how well large language models can understand and work with information about movement and spatial relationships. Language models are AI systems that are trained on vast amounts of text data to become skilled at natural language processing tasks.
The researchers wanted to see if these powerful language models could also be effective at tasks related to spatial understanding and trajectory prediction. For example, could a language model interpret the meaning and semantics of a description of someone's movement through a space? Or could it generate plausible predictions about how a person or object might move based on contextual information?
To test this, the researchers had the language models perform a variety of spatial reasoning exercises, like judging the relative positions of objects or inferring the semantics of movement trajectories. The results provide insights into the strengths and limitations of current language models when it comes to spatial cognition and reasoning about movement. This could help shape the development of language models that are more adept at understanding and reasoning about the physical world.
Technical Explanation
The paper presents a systematic evaluation of how well large language models can represent and understand movement trajectories. The researchers tested several prominent language models, including GPT-3, BERT, and RoBERTa, on a range of tasks related to spatial understanding and trajectory prediction.
For the spatial understanding tasks, the models were asked to judge the relative positions of objects, infer the semantics of movement trajectories, and reason about distortions in spatial relations. The trajectory prediction tasks involved generating plausible continuations of partial movement sequences and assessing the semantic coherence of the predicted trajectories.
The results show that while language models can capture some high-level spatial concepts, they still struggle with more fine-grained spatial reasoning and struggle to generate physically realistic trajectories. The models also exhibit systematic biases and distortions in their spatial understanding, failing to fully capture the nuances of human spatial cognition.
Critical Analysis
The paper provides a thorough and well-designed evaluation of language models' capabilities for spatial understanding and trajectory prediction. The researchers used a diverse set of tasks and benchmarks to probe the models' strengths and limitations in this domain.
One limitation noted in the paper is that the language models were not trained explicitly on spatial or movement data, and thus had to rely on more indirect cues and associations learned from text corpora. Incorporating more targeted training on spatial and trajectory data may improve the models' performance.
Additionally, the paper acknowledges that current language models still have fundamental shortcomings when it comes to reasoning about the physical world and generating plausible trajectories. More work is needed to develop language models that can truly integrate spatial and physical reasoning capabilities.
Overall, this research highlights the need for continued advancement in the field of AI spatial understanding and the importance of carefully evaluating the limitations of current language models when it comes to reasoning about the physical world.
Conclusion
This paper presents a comprehensive evaluation of how well large language models can represent and understand movement trajectories. The results show that while these models can capture some high-level spatial concepts, they still struggle with more fine-grained spatial reasoning and generating physically realistic trajectories.
The findings provide valuable insights into the current capabilities and limitations of language models when it comes to spatial cognition and reasoning about the physical world. This work can help guide the development of more advanced language models that are better equipped to understand and reason about spatial relationships and movement, with potential applications in areas like robotics, navigation, and human-AI interaction.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Evaluating the Effectiveness of Large Language Models in Representing and Understanding Movement Trajectories
Yuhan Ji, Song Gao
This research focuses on assessing the ability of AI foundation models in representing the trajectories of movements. We utilize one of the large language models (LLMs) (i.e., GPT-J) to encode the string format of trajectories and then evaluate the effectiveness of the LLM-based representation for trajectory data analysis. The experiments demonstrate that while the LLM-based embeddings can preserve certain trajectory distance metrics (i.e., the correlation coefficients exceed 0.74 between the Cosine distance derived from GPT-J embeddings and the Hausdorff and Dynamic Time Warping distances on raw trajectories), challenges remain in restoring numeric values and retrieving spatial neighbors in movement trajectory analytics. In addition, the LLMs can understand the spatiotemporal dependency contained in trajectories and have good accuracy in location prediction tasks. This research highlights the need for improvement in terms of capturing the nuances and complexities of the underlying geospatial data and integrating domain knowledge to support various GeoAI applications using LLMs.
Read more9/4/2024
🤔
0
Evaluating Spatial Understanding of Large Language Models
Yutaro Yamada, Yihan Bao, Andrew K. Lampinen, Jungo Kasai, Ilker Yildirim
Large language models (LLMs) show remarkable capabilities across a variety of tasks. Despite the models only seeing text in training, several recent studies suggest that LLM representations implicitly capture aspects of the underlying grounded concepts. Here, we explore LLM representations of a particularly salient kind of grounded knowledge -- spatial relationships. We design natural-language navigation tasks and evaluate the ability of LLMs, in particular GPT-3.5-turbo, GPT-4, and Llama2 series models, to represent and reason about spatial structures. These tasks reveal substantial variability in LLM performance across different spatial structures, including square, hexagonal, and triangular grids, rings, and trees. In extensive error analysis, we find that LLMs' mistakes reflect both spatial and non-spatial factors. These findings suggest that LLMs appear to capture certain aspects of spatial structure implicitly, but room for improvement remains.
Read more4/16/2024
💬
0
Beyond Words: Evaluating Large Language Models in Transportation Planning
Shaowei Ying, Zhenlong Li, Manzhu Yu
The resurgence and rapid advancement of Generative Artificial Intelligence (GenAI) in 2023 has catalyzed transformative shifts across numerous industry sectors, including urban transportation and logistics. This study investigates the evaluation of Large Language Models (LLMs), specifically GPT-4 and Phi-3-mini, to enhance transportation planning. The study assesses the performance and spatial comprehension of these models through a transportation-informed evaluation framework that includes general geospatial skills, general transportation domain skills, and real-world transportation problem-solving. Utilizing a mixed-methods approach, the research encompasses an evaluation of the LLMs' general Geographic Information System (GIS) skills, general transportation domain knowledge as well as abilities to support human decision-making in the real-world transportation planning scenarios of congestion pricing. Results indicate that GPT-4 demonstrates superior accuracy and reliability across various GIS and transportation-specific tasks compared to Phi-3-mini, highlighting its potential as a robust tool for transportation planners. Nonetheless, Phi-3-mini exhibits competence in specific analytical scenarios, suggesting its utility in resource-constrained environments. The findings underscore the transformative potential of GenAI technologies in urban transportation planning. Future work could explore the application of newer LLMs and the impact of Retrieval-Augmented Generation (RAG) techniques, on a broader set of real-world transportation planning and operations challenges, to deepen the integration of advanced AI models in transportation management practices.
Read more9/24/2024
0
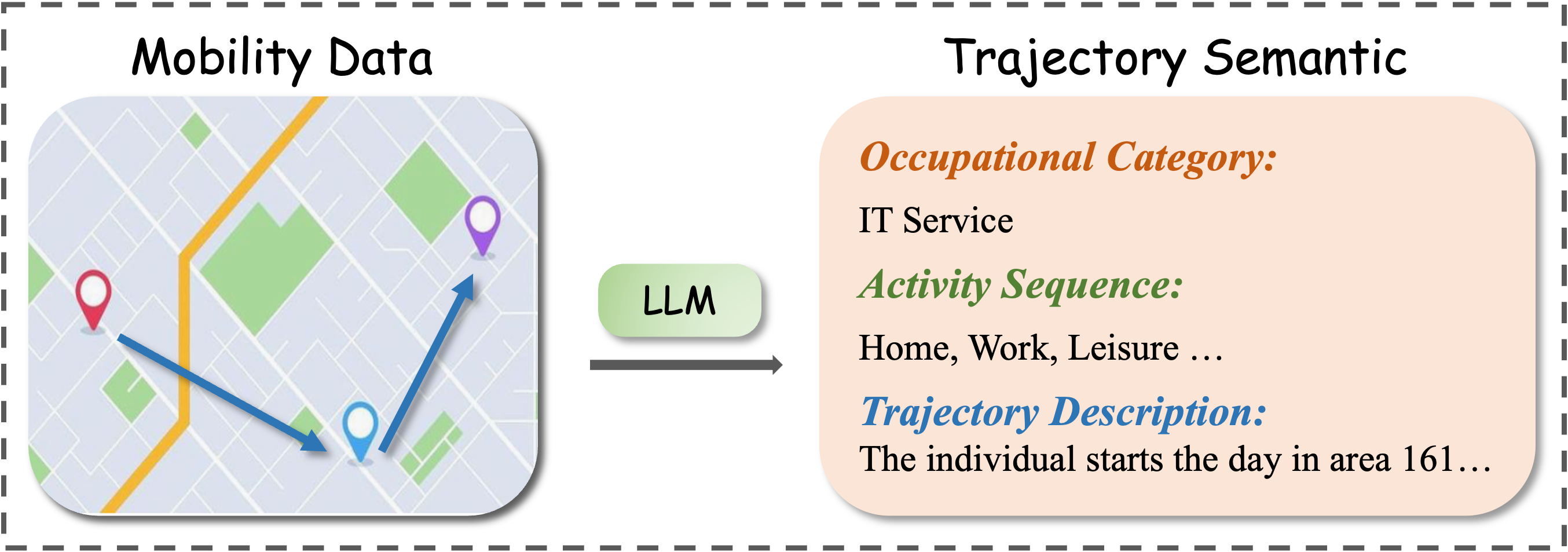
Deciphering Human Mobility: Inferring Semantics of Trajectories with Large Language Models
Yuxiao Luo, Zhongcai Cao, Xin Jin, Kang Liu, Ling Yin
Understanding human mobility patterns is essential for various applications, from urban planning to public safety. The individual trajectory such as mobile phone location data, while rich in spatio-temporal information, often lacks semantic detail, limiting its utility for in-depth mobility analysis. Existing methods can infer basic routine activity sequences from this data, lacking depth in understanding complex human behaviors and users' characteristics. Additionally, they struggle with the dependency on hard-to-obtain auxiliary datasets like travel surveys. To address these limitations, this paper defines trajectory semantic inference through three key dimensions: user occupation category, activity sequence, and trajectory description, and proposes the Trajectory Semantic Inference with Large Language Models (TSI-LLM) framework to leverage LLMs infer trajectory semantics comprehensively and deeply. We adopt spatio-temporal attributes enhanced data formatting (STFormat) and design a context-inclusive prompt, enabling LLMs to more effectively interpret and infer the semantics of trajectory data. Experimental validation on real-world trajectory datasets demonstrates the efficacy of TSI-LLM in deciphering complex human mobility patterns. This study explores the potential of LLMs in enhancing the semantic analysis of trajectory data, paving the way for more sophisticated and accessible human mobility research.
Read more5/31/2024