Language Models as Zero-Shot Trajectory Generators
2310.11604
0
0

Abstract
Large Language Models (LLMs) have recently shown promise as high-level planners for robots when given access to a selection of low-level skills. However, it is often assumed that LLMs do not possess sufficient knowledge to be used for the low-level trajectories themselves. In this work, we address this assumption thoroughly, and investigate if an LLM (GPT-4) can directly predict a dense sequence of end-effector poses for manipulation tasks, when given access to only object detection and segmentation vision models. We designed a single, task-agnostic prompt, without any in-context examples, motion primitives, or external trajectory optimisers. Then we studied how well it can perform across 30 real-world language-based tasks, such as open the bottle cap and wipe the plate with the sponge, and we investigated which design choices in this prompt are the most important. Our conclusions raise the assumed limit of LLMs for robotics, and we reveal for the first time that LLMs do indeed possess an understanding of low-level robot control sufficient for a range of common tasks, and that they can additionally detect failures and then re-plan trajectories accordingly. Videos, prompts, and code are available at: https://www.robot-learning.uk/language-models-trajectory-generators.
Create account to get full access
Overview
- This paper explores the use of large language models (LLMs) as zero-shot trajectory generators for robotics tasks.
- The researchers investigate whether LLMs can be used to generate feasible trajectories for robotic manipulation tasks without any task-specific training.
- The paper focuses on developing effective prompting techniques to enable LLMs to generate meaningful trajectories for diverse robotic tasks.
Plain English Explanation
The paper looks at using large language models - powerful AI systems trained on vast amounts of text data - to control robotic arms and other devices. Typically, robots need to be trained specifically for each task they need to perform. But the researchers wanted to see if they could use language models to generate the instructions, or "trajectories," for a robot to follow, without any prior training on that particular task.
The key idea is to provide the language model with a detailed description of what you want the robot to do, and have the model generate a step-by-step plan for how the robot should move to achieve that goal. For example, you could ask the model to "Pick up the red ball and place it in the blue box," and it would try to output a sequence of movements the robot should make to accomplish that task.
The researchers experimented with different ways of phrasing these instructions, or "prompts," to the language model to see which ones resulted in the most feasible and useful trajectories. The goal is to find prompting techniques that allow language models to act as "zero-shot" trajectory generators - meaning they can generate trajectories for new tasks they haven't been trained on before.
Technical Explanation
The paper explores using large language models as zero-shot trajectory generators for robotic manipulation tasks. The key hypothesis is that LLMs, trained on vast amounts of natural language data, can leverage their strong language understanding and generation capabilities to produce feasible trajectories for diverse robotic tasks, even without any task-specific training.
The researchers develop a framework for prompting LLMs to generate trajectories, exploring various prompt engineering techniques. The prompts include a description of the task, the initial and goal states, as well as hints about the desired trajectory characteristics. The generated trajectories are then evaluated for feasibility, measured by their ability to avoid collisions and satisfy kinematic constraints.
Experiments are conducted on a range of robotic manipulation tasks, including pick-and-place, peg insertion, and multi-step navigation. The results demonstrate that well-designed prompts allow LLMs to produce meaningful trajectories that are often on-par with or even outperform traditional trajectory planners, despite the lack of any task-specific training. The paper also discusses the limitations of the current approach and opportunities for future work, such as incorporating reinforcement learning or closing the loop with additional sensors.
Critical Analysis
The paper presents a promising approach to leveraging the impressive language understanding and generation capabilities of LLMs for robotics applications. The key strength is the ability to generate feasible trajectories for a wide range of tasks without any prior training, which could greatly simplify the development and deployment of robotic systems.
However, the paper also acknowledges several limitations and areas for further research. The current prompting techniques, while effective, may not be robust to changes in the task or environment, and more advanced prompt engineering or other techniques may be needed to improve generalization. Additionally, the trajectories generated by the LLMs are not always optimal, and combining them with traditional optimization-based planners or reinforcement learning could lead to further improvements.
Another important consideration is the safety and reliability of these systems, as the paper does not deeply explore the consistency and predictability of the LLM-generated trajectories. Careful testing and validation would be necessary before deploying such systems in real-world applications, especially those involving physical interaction with the environment or humans.
Overall, the research presented in this paper represents an exciting step towards more flexible and versatile robotic systems, but there is still much work to be done to fully realize the potential of language-driven robotic control.
Conclusion
This paper demonstrates the promising potential of using large language models as zero-shot trajectory generators for robotic manipulation tasks. By leveraging the impressive language understanding and generation capabilities of LLMs, the researchers have shown that it is possible to produce feasible trajectories for a wide range of tasks without any task-specific training.
The development of effective prompting techniques is a key contribution, as it allows LLMs to generate meaningful trajectories that can often match or even exceed the performance of traditional trajectory planners. While the current approach has some limitations, the paper highlights exciting opportunities for future work, such as combining LLM-based trajectory generation with reinforcement learning or closed-loop control using additional sensors.
Overall, this research represents an important step towards more flexible and versatile robotic systems that can adapt to a wide range of tasks and environments, potentially reducing the time and effort required for robotic system development and deployment. As the field of language-driven robotics continues to evolve, the insights and techniques presented in this paper will likely play a significant role in shaping the future of this exciting area of research.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
Can only LLMs do Reasoning?: Potential of Small Language Models in Task Planning
Gawon Choi, Hyemin Ahn
0
0
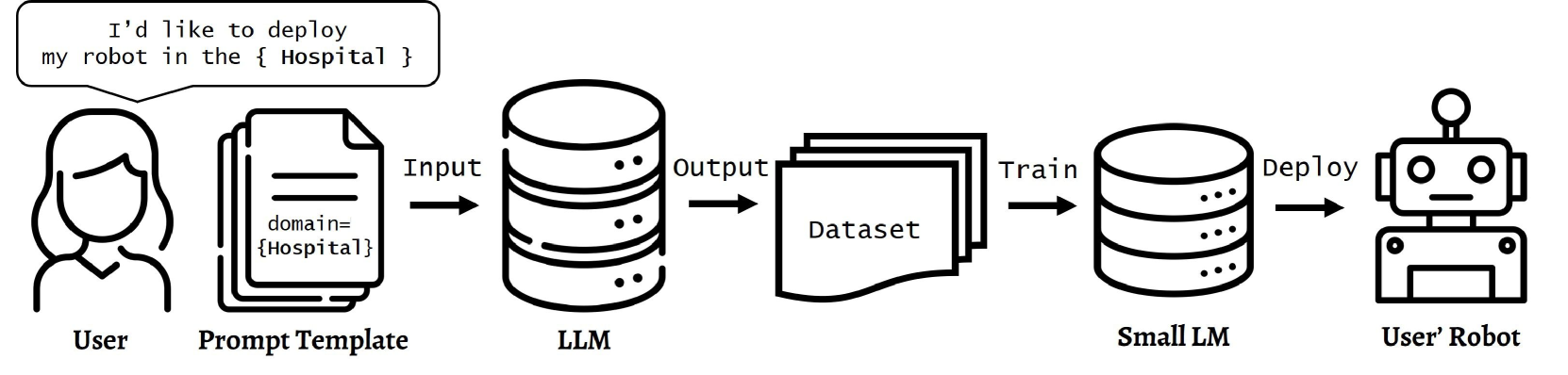
In robotics, the use of Large Language Models (LLMs) is becoming prevalent, especially for understanding human commands. In particular, LLMs are utilized as domain-agnostic task planners for high-level human commands. LLMs are capable of Chain-of-Thought (CoT) reasoning, and this allows LLMs to be task planners. However, we need to consider that modern robots still struggle to perform complex actions, and the domains where robots can be deployed are limited in practice. This leads us to pose a question: If small LMs can be trained to reason in chains within a single domain, would even small LMs be good task planners for the robots? To train smaller LMs to reason in chains, we build `COmmand-STeps datasets' (COST) consisting of high-level commands along with corresponding actionable low-level steps, via LLMs. We release not only our datasets but also the prompt templates used to generate them, to allow anyone to build datasets for their domain. We compare GPT3.5 and GPT4 with the finetuned GPT2 for task domains, in tabletop and kitchen environments, and the result shows that GPT2-medium is comparable to GPT3.5 for task planning in a specific domain. Our dataset, code, and more output samples can be found in https://github.com/Gawon-Choi/small-LMs-Task-Planning
4/8/2024
Language-Driven Closed-Loop Grasping with Model-Predictive Trajectory Replanning
Huy Hoang Nguyen, Minh Nhat Vu, Florian Beck, Gerald Ebmer, Anh Nguyen, Andreas Kugi
0
0
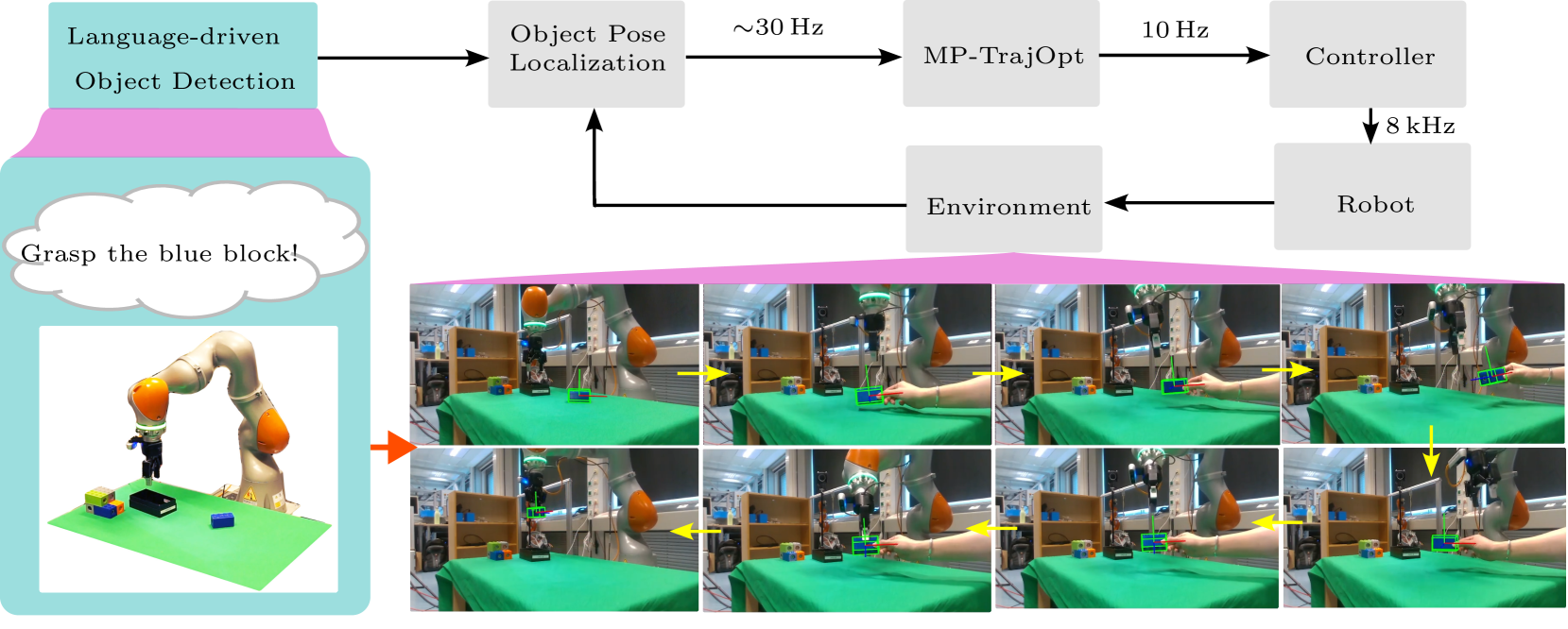
Combining a vision module inside a closed-loop control system for a emph{seamless movement} of a robot in a manipulation task is challenging due to the inconsistent update rates between utilized modules. This task is even more difficult in a dynamic environment, e.g., objects are moving. This paper presents a emph{modular} zero-shot framework for language-driven manipulation of (dynamic) objects through a closed-loop control system with real-time trajectory replanning and an online 6D object pose localization. We segment an object within $SI{0.5}{second}$ by leveraging a vision language model via language commands. Then, guided by natural language commands, a closed-loop system, including a unified pose estimation and tracking and online trajectory planning, is utilized to continuously track this object and compute the optimal trajectory in real-time. Our proposed zero-shot framework provides a smooth trajectory that avoids jerky movements and ensures the robot can grasp a non-stationary object. Experiment results exhibit the real-time capability of the proposed zero-shot modular framework for the trajectory optimization module to accurately and efficiently grasp moving objects, i.e., up to SI{30}{hertz} update rates for the online 6D pose localization module and SI{10}{hertz} update rates for the receding-horizon trajectory optimization. These advantages highlight the modular framework's potential applications in robotics and human-robot interaction; see the video in https://www.acin.tuwien.ac.at/en/6e64/.
6/21/2024
💬
Plan-Seq-Learn: Language Model Guided RL for Solving Long Horizon Robotics Tasks
Murtaza Dalal, Tarun Chiruvolu, Devendra Chaplot, Ruslan Salakhutdinov
0
0
Large Language Models (LLMs) have been shown to be capable of performing high-level planning for long-horizon robotics tasks, yet existing methods require access to a pre-defined skill library (e.g. picking, placing, pulling, pushing, navigating). However, LLM planning does not address how to design or learn those behaviors, which remains challenging particularly in long-horizon settings. Furthermore, for many tasks of interest, the robot needs to be able to adjust its behavior in a fine-grained manner, requiring the agent to be capable of modifying low-level control actions. Can we instead use the internet-scale knowledge from LLMs for high-level policies, guiding reinforcement learning (RL) policies to efficiently solve robotic control tasks online without requiring a pre-determined set of skills? In this paper, we propose Plan-Seq-Learn (PSL): a modular approach that uses motion planning to bridge the gap between abstract language and learned low-level control for solving long-horizon robotics tasks from scratch. We demonstrate that PSL achieves state-of-the-art results on over 25 challenging robotics tasks with up to 10 stages. PSL solves long-horizon tasks from raw visual input spanning four benchmarks at success rates of over 85%, out-performing language-based, classical, and end-to-end approaches. Video results and code at https://mihdalal.github.io/planseqlearn/
5/3/2024
Towards Natural Language-Driven Assembly Using Foundation Models
Omkar Joglekar, Tal Lancewicki, Shir Kozlovsky, Vladimir Tchuiev, Zohar Feldman, Dotan Di Castro
0
0
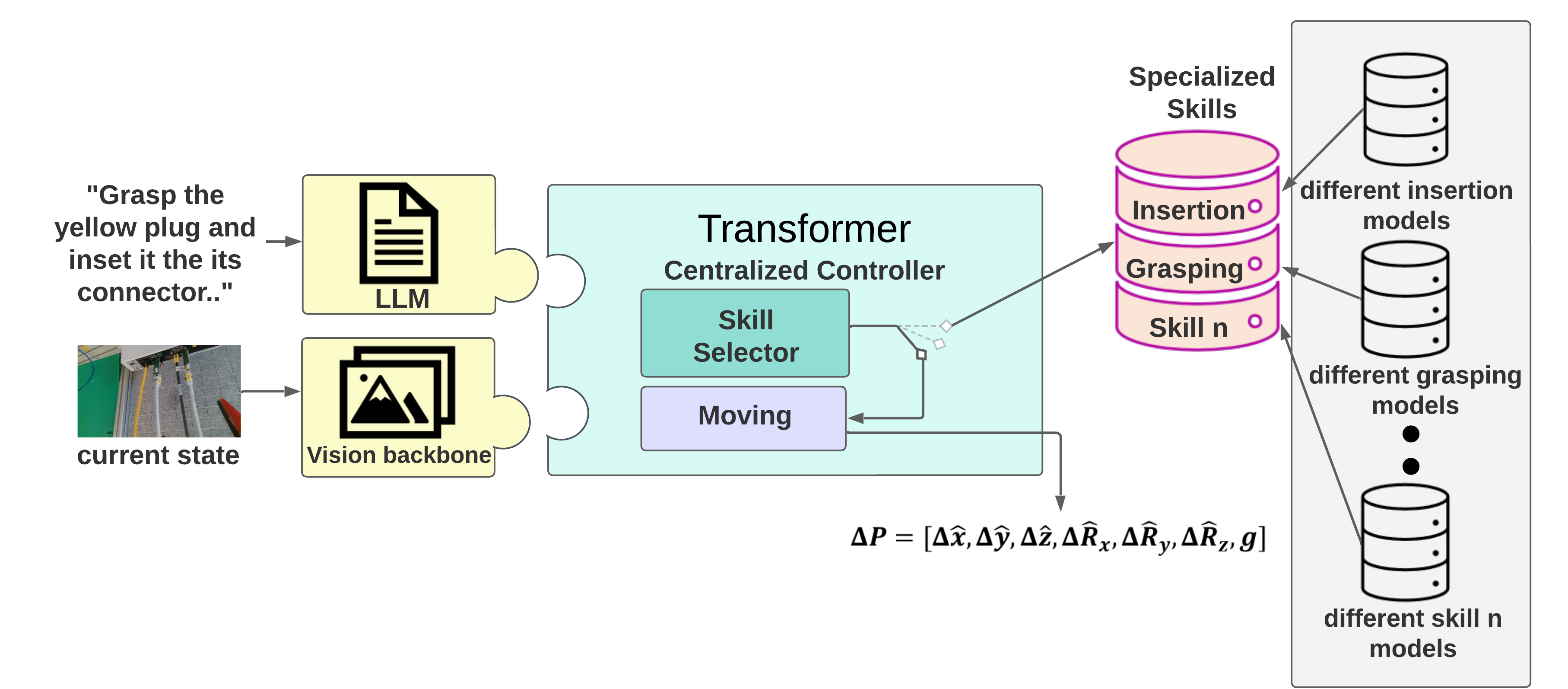
Large Language Models (LLMs) and strong vision models have enabled rapid research and development in the field of Vision-Language-Action models that enable robotic control. The main objective of these methods is to develop a generalist policy that can control robots with various embodiments. However, in industrial robotic applications such as automated assembly and disassembly, some tasks, such as insertion, demand greater accuracy and involve intricate factors like contact engagement, friction handling, and refined motor skills. Implementing these skills using a generalist policy is challenging because these policies might integrate further sensory data, including force or torque measurements, for enhanced precision. In our method, we present a global control policy based on LLMs that can transfer the control policy to a finite set of skills that are specifically trained to perform high-precision tasks through dynamic context switching. The integration of LLMs into this framework underscores their significance in not only interpreting and processing language inputs but also in enriching the control mechanisms for diverse and intricate robotic operations.
6/26/2024