Semantic Landmark Detection & Classification Using Neural Networks For 3D In-Air Sonar

0

Sign in to get full access
Overview
- This paper proposes a method for detecting and classifying semantic landmarks in 3D in-air sonar data using neural networks.
- The approach leverages deep learning techniques to automatically identify and categorize relevant objects and features in the sonar data, such as walls, floors, and furniture.
- The authors demonstrate the effectiveness of their method on a dataset of 3D in-air sonar scans, showing improved performance compared to traditional techniques.
Plain English Explanation
In this paper, the researchers developed a system that can automatically identify and categorize important landmarks and objects in 3D sonar data. Sonar is a technology that uses sound waves to detect and locate objects, similar to how bats and dolphins use echolocation. The researchers used neural networks, a type of artificial intelligence, to analyze the sonar data and recognize things like walls, floors, and furniture.
This is useful for applications like robot sensing systems or underwater mapping, where you need to quickly and accurately understand the 3D environment from sonar data. By using deep learning, the system can identify semantic landmarks (meaningful objects) in the data, rather than just low-level features. This provides richer and more useful information for tasks like robot navigation or 3D scene reconstruction.
The paper demonstrates the effectiveness of this approach on a dataset of 3D in-air sonar scans, showing that it outperforms traditional techniques for landmark detection and classification. This suggests the potential for this method to be applied in various real-world scenarios where understanding 3D environments from sonar data is important.
Technical Explanation
The key aspects of the paper are:
-
Landmark Detection and Classification: The proposed method uses deep neural networks to automatically detect and classify semantic landmarks in 3D in-air sonar data. This goes beyond just identifying low-level features, and can recognize higher-level objects and structures like walls, floors, and furniture.
-
Neural Network Architecture: The authors develop a custom neural network architecture that takes 3D sonar point cloud data as input and outputs a semantic segmentation of the landmarks. This includes feature extraction, contextual modeling, and classification components.
-
Evaluation on 3D In-Air Sonar Dataset: The method is evaluated on a dataset of 3D sonar scans captured in indoor environments. The results show that the deep learning-based approach outperforms traditional techniques for landmark detection and classification.
The insights from this work suggest that deep learning can be effectively applied to the problem of understanding 3D environments from sonar data, with applications in areas like robot navigation, underwater mapping, and localization. The automated detection and classification of semantic landmarks can provide richer information about the environment compared to traditional techniques.
Critical Analysis
The paper provides a compelling approach for leveraging deep learning to extract semantic information from 3D sonar data. However, there are a few potential limitations and areas for further research:
-
Dataset Size and Diversity: The evaluation is conducted on a single dataset of 3D in-air sonar scans. It would be valuable to test the method on a larger and more diverse set of sonar data, including underwater and outdoor environments, to assess its generalization capabilities.
-
Real-Time Performance: The paper does not address the computational efficiency of the proposed method, which is an important consideration for real-time applications like robot navigation. Further optimization and analysis of the method's inference speed would be beneficial.
-
Robustness to Noise and Sensor Errors: Sonar data can be susceptible to various sources of noise and errors, such as multipath reflections and sensor calibration issues. Evaluating the method's robustness to these challenges would help understand its practical limitations.
-
Comparison to Other Modalities: While the paper compares the deep learning-based approach to traditional sonar-based techniques, it would be valuable to also compare it to methods that use other sensor modalities, such as LiDAR or RGB-D cameras, to assess the relative strengths and weaknesses of the different techniques.
Overall, the paper presents a promising approach for leveraging deep learning to enhance the understanding of 3D environments from sonar data, with potential applications in a variety of domains. Further research and validation on larger and more diverse datasets would help solidify the method's capabilities and identify areas for improvement.
Conclusion
This paper introduces a deep learning-based approach for detecting and classifying semantic landmarks in 3D in-air sonar data. The proposed method leverages neural networks to automatically identify and categorize relevant objects and features, such as walls, floors, and furniture, which can provide richer information about the environment compared to traditional techniques.
The authors demonstrate the effectiveness of their approach on a dataset of 3D sonar scans, showing improved performance for landmark detection and classification tasks. This suggests the potential for this method to be applied in various real-world scenarios where understanding 3D environments from sonar data is important, such as robot navigation, underwater mapping, and 3D scene reconstruction.
While the paper presents a compelling solution, further research is needed to assess the method's robustness, computational efficiency, and generalization to a wider range of sonar data and environments. Comparing the deep learning-based approach to other sensor modalities could also provide valuable insights. Overall, this work highlights the promising capabilities of deep learning for enhancing the interpretation of 3D sonar data, with significant implications for a variety of applications.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Semantic Landmark Detection & Classification Using Neural Networks For 3D In-Air Sonar
Wouter Jansen, Jan Steckel
In challenging environments where traditional sensing modalities struggle, in-air sonar offers resilience to optical interference. Placing a priori known landmarks in these environments can eliminate accumulated errors in autonomous mobile systems such as Simultaneous Localization and Mapping (SLAM) and autonomous navigation. We present a novel approach using a convolutional neural network to detect and classify ten different reflector landmarks with varying radii using in-air 3D sonar. Additionally, the network predicts the orientation angle of the detected landmarks. The neural network is trained on cochleograms, representing echoes received by the sensor in a time-frequency domain. Experimental results in cluttered indoor settings show promising performance. The CNN achieves a 97.3% classification accuracy on the test dataset, accurately detecting both the presence and absence of landmarks. Moreover, the network predicts landmark orientation angles with an RMSE lower than 10 degrees, enhancing the utility in SLAM and autonomous navigation applications. This advancement improves the robustness and accuracy of autonomous systems in challenging environments.
Read more5/31/2024
0
Infinite 3D Landmarks: Improving Continuous 2D Facial Landmark Detection
Prashanth Chandran, Gaspard Zoss, Paulo Gotardo, Derek Bradley
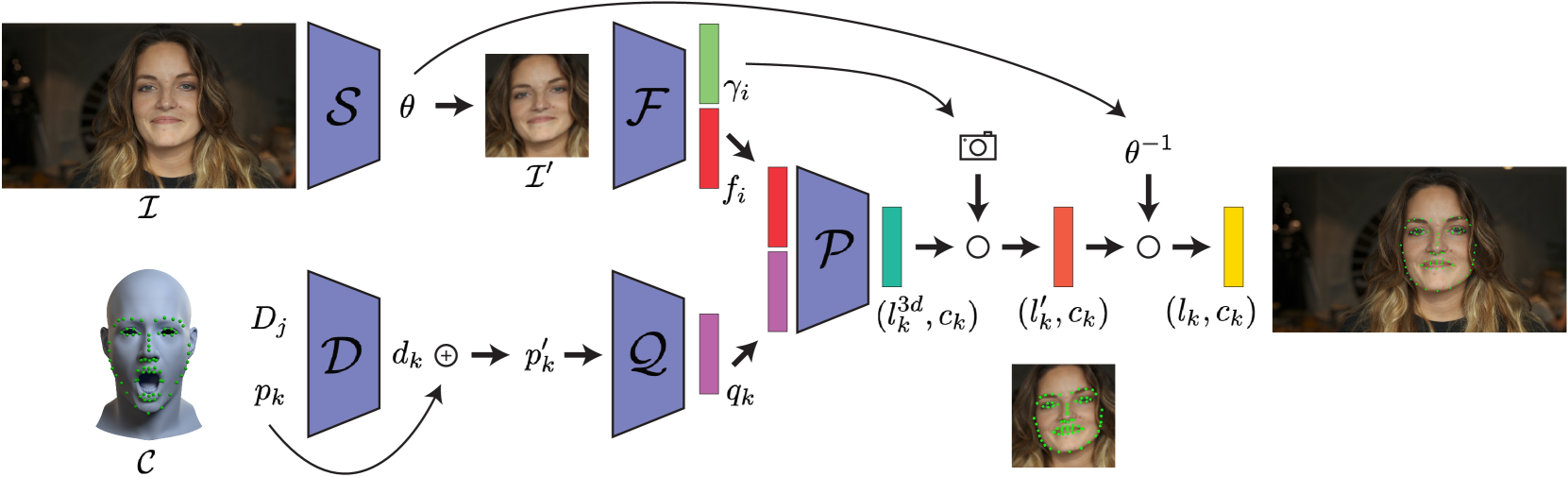
In this paper, we examine 3 important issues in the practical use of state-of-the-art facial landmark detectors and show how a combination of specific architectural modifications can directly improve their accuracy and temporal stability. First, many facial landmark detectors require face normalization as a preprocessing step, which is accomplished by a separately-trained neural network that crops and resizes the face in the input image. There is no guarantee that this pre-trained network performs the optimal face normalization for landmark detection. We instead analyze the use of a spatial transformer network that is trained alongside the landmark detector in an unsupervised manner, and jointly learn optimal face normalization and landmark detection. Second, we show that modifying the output head of the landmark predictor to infer landmarks in a canonical 3D space can further improve accuracy. To convert the predicted 3D landmarks into screen-space, we additionally predict the camera intrinsics and head pose from the input image. As a side benefit, this allows to predict the 3D face shape from a given image only using 2D landmarks as supervision, which is useful in determining landmark visibility among other things. Finally, when training a landmark detector on multiple datasets at the same time, annotation inconsistencies across datasets forces the network to produce a suboptimal average. We propose to add a semantic correction network to address this issue. This additional lightweight neural network is trained alongside the landmark detector, without requiring any additional supervision. While the insights of this paper can be applied to most common landmark detectors, we specifically target a recently-proposed continuous 2D landmark detector to demonstrate how each of our additions leads to meaningful improvements over the state-of-the-art on standard benchmarks.
Read more5/31/2024

0
New!A machine learning framework for acoustic reflector mapping
Usama Saqib, Letizia Marchegiani, Jesper Rindom Jensen
Sonar-based indoor mapping systems have been widely employed in robotics for several decades. While such systems are still the mainstream in underwater and pipe inspection settings, the vulnerability to noise reduced, over time, their general widespread usage in favour of other modalities(textit{e.g.}, cameras, lidars), whose technologies were encountering, instead, extraordinary advancements. Nevertheless, mapping physical environments using acoustic signals and echolocation can bring significant benefits to robot navigation in adverse scenarios, thanks to their complementary characteristics compared to other sensors. Cameras and lidars, indeed, struggle in harsh weather conditions, when dealing with lack of illumination, or with non-reflective walls. Yet, for acoustic sensors to be able to generate accurate maps, noise has to be properly and effectively handled. Traditional signal processing techniques are not always a solution in those cases. In this paper, we propose a framework where machine learning is exploited to aid more traditional signal processing methods to cope with background noise, by removing outliers and artefacts from the generated maps using acoustic sensors. Our goal is to demonstrate that the performance of traditional echolocation mapping techniques can be greatly enhanced, even in particularly noisy conditions, facilitating the employment of acoustic sensors in state-of-the-art multi-modal robot navigation systems. Our simulated evaluation demonstrates that the system can reliably operate at an SNR of $-10$dB. Moreover, we also show that the proposed method is capable of operating in different reverberate environments. In this paper, we also use the proposed method to map the outline of a simulated room using a robotic platform.
Read more9/19/2024
🖼️
0
SONIC: Sonar Image Correspondence using Pose Supervised Learning for Imaging Sonars
Samiran Gode, Akshay Hinduja, Michael Kaess
In this paper, we address the challenging problem of data association for underwater SLAM through a novel method for sonar image correspondence using learned features. We introduce SONIC (SONar Image Correspondence), a pose-supervised network designed to yield robust feature correspondence capable of withstanding viewpoint variations. The inherent complexity of the underwater environment stems from the dynamic and frequently limited visibility conditions, restricting vision to a few meters of often featureless expanses. This makes camera-based systems suboptimal in most open water application scenarios. Consequently, multibeam imaging sonars emerge as the preferred choice for perception sensors. However, they too are not without their limitations. While imaging sonars offer superior long-range visibility compared to cameras, their measurements can appear different from varying viewpoints. This inherent variability presents formidable challenges in data association, particularly for feature-based methods. Our method demonstrates significantly better performance in generating correspondences for sonar images which will pave the way for more accurate loop closure constraints and sonar-based place recognition. Code as well as simulated and real-world datasets will be made public to facilitate further development in the field.
Read more5/15/2024