Factor Graph-Based Planning as Inference for Autonomous Vehicle Racing

0
🤯
Sign in to get full access
Overview
- This study explores the use of factor graphs, a type of graphical model, to solve the autonomous racecar planning problem.
- The planning problem is formulated as a probabilistic inference task over a factor graph, where factor nodes capture the joint distribution of motion objectives.
- The proposed approach leverages the duality between optimization and inference to obtain a fast solution to the maximum a posteriori estimation of the factor graph.
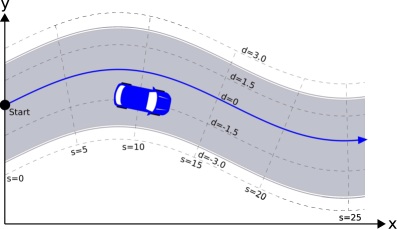
- The localized design of the factor graph ensures that motion objectives depend on a small subset of variables, enabling the integration of minimum curvature path and local planning computations into a unified algorithm.
Plain English Explanation
The paper describes a new way to plan the movements of an autonomous racecar using a technique called factor graphs. Factor graphs are a type of diagram that can be used to represent complex relationships between different parts of a system.
In this case, the researchers used a factor graph to model the goals and constraints that the racecar needs to consider when planning its path, such as minimizing the curvature of the route and maintaining a high average speed. By representing these objectives as "factor nodes" in the graph, the researchers were able to find an efficient solution to the planning problem using mathematical optimization techniques.
This approach is different from the traditional way of solving autonomous racecar planning, which often involves separating the problem into two parts: a global planning stage that finds a rough route, and a local planning stage that refines the path. The factor graph method allows these two stages to be combined into a single, seamless algorithm, which the researchers found to be more computationally efficient and able to produce better results in terms of curvature and speed.
Technical Explanation
The paper presents a novel approach to the autonomous racecar planning problem by modeling it as a probabilistic inference task over a factor graph. A factor graph is a type of bipartite graphical model that represents the factorization of a joint probability distribution.
In this formulation, the factor nodes in the graph capture the joint distribution of the racecar's motion objectives, such as minimizing curvature and maximizing average speed. By leveraging the duality between optimization and inference, the researchers were able to obtain a fast solution to the maximum a posteriori (MAP) estimation of the factor graph via least-squares optimization.
The key advantage of this approach is the localized design of the factor graph, where each motion objective depends on a small subset of variables. This enables the integration of the minimum curvature path and local planning computations into a unified algorithm, in contrast to the conventional separation of global and local planning modules.
The evaluation of the proposed framework demonstrated superior performance in terms of cumulative curvature and average speed across the racetrack, while also highlighting its computational efficiency. The researchers acknowledge the structural design advantages and computational efficiency of their approach, but also discuss its limitations and potential directions for future research.
Critical Analysis
The paper presents a compelling and innovative approach to autonomous racecar planning by leveraging the power of factor graphs. The key strength of the proposed method is its ability to seamlessly integrate global and local planning considerations, which is a significant departure from the traditional separation of these two stages.
One potential limitation of the factor graph approach, as acknowledged by the authors, is the need to carefully design the factor nodes to capture the relevant motion objectives. This may require domain-specific knowledge and may not be as generalizable as some other planning algorithms. Additionally, while the paper demonstrates the computational efficiency of the proposed method, it would be useful to see a more comprehensive comparison to other state-of-the-art planning algorithms, especially in terms of factors such as planning accuracy, robustness to environmental changes, and real-time performance.
Another area that could be explored is the potential integration of the factor graph approach with other emerging techniques in autonomous driving, such as online spatial-temporal graph trajectory planning or sampling-based motion planning. By combining complementary methodologies, the overall performance and reliability of autonomous racecar systems could be further enhanced.
Conclusion
This paper presents a novel approach to autonomous racecar planning by formulating the problem as a probabilistic inference task over a factor graph. The key advantages of this method are its ability to seamlessly integrate global and local planning considerations, as well as its computational efficiency.
While the paper demonstrates the effectiveness of the factor graph approach, it also highlights the need for careful design of the factor nodes and the potential for further integration with other emerging techniques in autonomous driving. As the field of autonomous vehicles continues to evolve, the insights and methodologies presented in this paper could contribute to the development of more robust and capable racecar systems, with potential applications beyond the racetrack in real-time motion planning for autonomous vehicles in dynamic environments.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
🤯
0
Factor Graph-Based Planning as Inference for Autonomous Vehicle Racing
Salman Bari, Xiagong Wang, Ahmad Schoha Haidari, Dirk Wollherr
Factor graph, as a bipartite graphical model, offers a structured representation by revealing local connections among graph nodes. This study explores the utilization of factor graphs in modeling the autonomous racecar planning problem, presenting an alternate perspective to the traditional optimization-based formulation. We model the planning problem as a probabilistic inference over a factor graph, with factor nodes capturing the joint distribution of motion objectives. By leveraging the duality between optimization and inference, a fast solution to the maximum a posteriori estimation of the factor graph is obtained via least-squares optimization. The localized design thinking inherent in this formulation ensures that motion objectives depend on a small subset of variables. We exploit the locality feature of the factor graph structure to integrate the minimum curvature path and local planning computations into a unified algorithm. This diverges from the conventional separation of global and local planning modules, where curvature minimization occurs at the global level. The evaluation of the proposed framework demonstrated superior performance for cumulative curvature and average speed across the racetrack. Furthermore, the results highlight the computational efficiency of our approach. While acknowledging the structural design advantages and computational efficiency of the proposed methodology, we also address its limitations and outline potential directions for future research.
Read more6/27/2024
0
An Online Spatial-Temporal Graph Trajectory Planner for Autonomous Vehicles
Jilan Samiuddin, Benoit Boulet, Di Wu
The autonomous driving industry is expected to grow by over 20 times in the coming decade and, thus, motivate researchers to delve into it. The primary focus of their research is to ensure safety, comfort, and efficiency. An autonomous vehicle has several modules responsible for one or more of the aforementioned items. Among these modules, the trajectory planner plays a pivotal role in the safety of the vehicle and the comfort of its passengers. The module is also responsible for respecting kinematic constraints and any applicable road constraints. In this paper, a novel online spatial-temporal graph trajectory planner is introduced to generate safe and comfortable trajectories. First, a spatial-temporal graph is constructed using the autonomous vehicle, its surrounding vehicles, and virtual nodes along the road with respect to the vehicle itself. Next, the graph is forwarded into a sequential network to obtain the desired states. To support the planner, a simple behavioral layer is also presented that determines kinematic constraints for the planner. Furthermore, a novel potential function is also proposed to train the network. Finally, the proposed planner is tested on three different complex driving tasks, and the performance is compared with two frequently used methods. The results show that the proposed planner generates safe and feasible trajectories while achieving similar or longer distances in the forward direction and comparable comfort ride.
Read more4/19/2024

0
New!Metric-Semantic Factor Graph Generation based on Graph Neural Networks
Jose Andres Millan-Romera, Hriday Bavle, Muhammad Shaheer, Holger Voos, Jose Luis Sanchez-Lopez
Understanding the relationships between geometric structures and semantic concepts is crucial for building accurate models of complex environments. In indoors, certain spatial constraints, such as the relative positioning of planes, remain consistent despite variations in layout. This paper explores how these invariant relationships can be captured in a graph SLAM framework by representing high-level concepts like rooms and walls, linking them to geometric elements like planes through an optimizable factor graph. Several efforts have tackled this issue with add-hoc solutions for each concept generation and with manually-defined factors. This paper proposes a novel method for metric-semantic factor graph generation which includes defining a semantic scene graph, integrating geometric information, and learning the interconnecting factors, all based on Graph Neural Networks (GNNs). An edge classification network (G-GNN) sorts the edges between planes into same room, same wall or none types. The resulting relations are clustered, generating a room or wall for each cluster. A second family of networks (F-GNN) infers the geometrical origin of the new nodes. The definition of the factors employs the same F-GNN used for the metric attribute of the generated nodes. Furthermore, share the new factor graph with the S-Graphs+ algorithm, extending its graph expressiveness and scene representation with the ultimate goal of improving the SLAM performance. The complexity of the environments is increased to N-plane rooms by training the networks on L-shaped rooms. The framework is evaluated in synthetic and simulated scenarios as no real datasets of the required complex layouts are available.
Read more9/19/2024
🏅
0
Geo-Localization Based on Dynamically Weighted Factor-Graph
Miguel 'Angel Mu~noz-Ba~n'on, Alejandro Olivas, Edison Velasco-S'anchez, Francisco A. Candelas, Fernando Torres
Feature-based geo-localization relies on associating features extracted from aerial imagery with those detected by the vehicle's sensors. This requires that the type of landmarks must be observable from both sources. This lack of variety of feature types generates poor representations that lead to outliers and deviations produced by ambiguities and lack of detections, respectively. To mitigate these drawbacks, in this paper, we present a dynamically weighted factor graph model for the vehicle's trajectory estimation. The weight adjustment in this implementation depends on information quantification in the detections performed using a LiDAR sensor. Also, a prior (GNSS-based) error estimation is included in the model. Then, when the representation becomes ambiguous or sparse, the weights are dynamically adjusted to rely on the corrected prior trajectory, mitigating outliers and deviations in this way. We compare our method against state-of-the-art geo-localization ones in a challenging and ambiguous environment, where we also cause detection losses. We demonstrate mitigation of the mentioned drawbacks where the other methods fail.
Read more5/17/2024